控制装置及控制方法与流程
本公开涉及在成组(group)行驶中能够使自适应巡航控制恰当化的控制装置及控制方法。
背景技术:
1、以往,提出了对摩托车(motorcycle)的骑乘者(rider)的驾驶进行辅助的各种技术。例如,在专利文献1中,公开了一种驾驶者辅助系统,所述驾驶者辅助系统基于由检测处于行驶方向或实质上处于行驶方向上的障碍物的传感器装置检测到的信息,向摩托车的骑乘者警告不适当地接近于障碍物。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2009-116882号公报
技术实现思路
1、发明要解决的课题
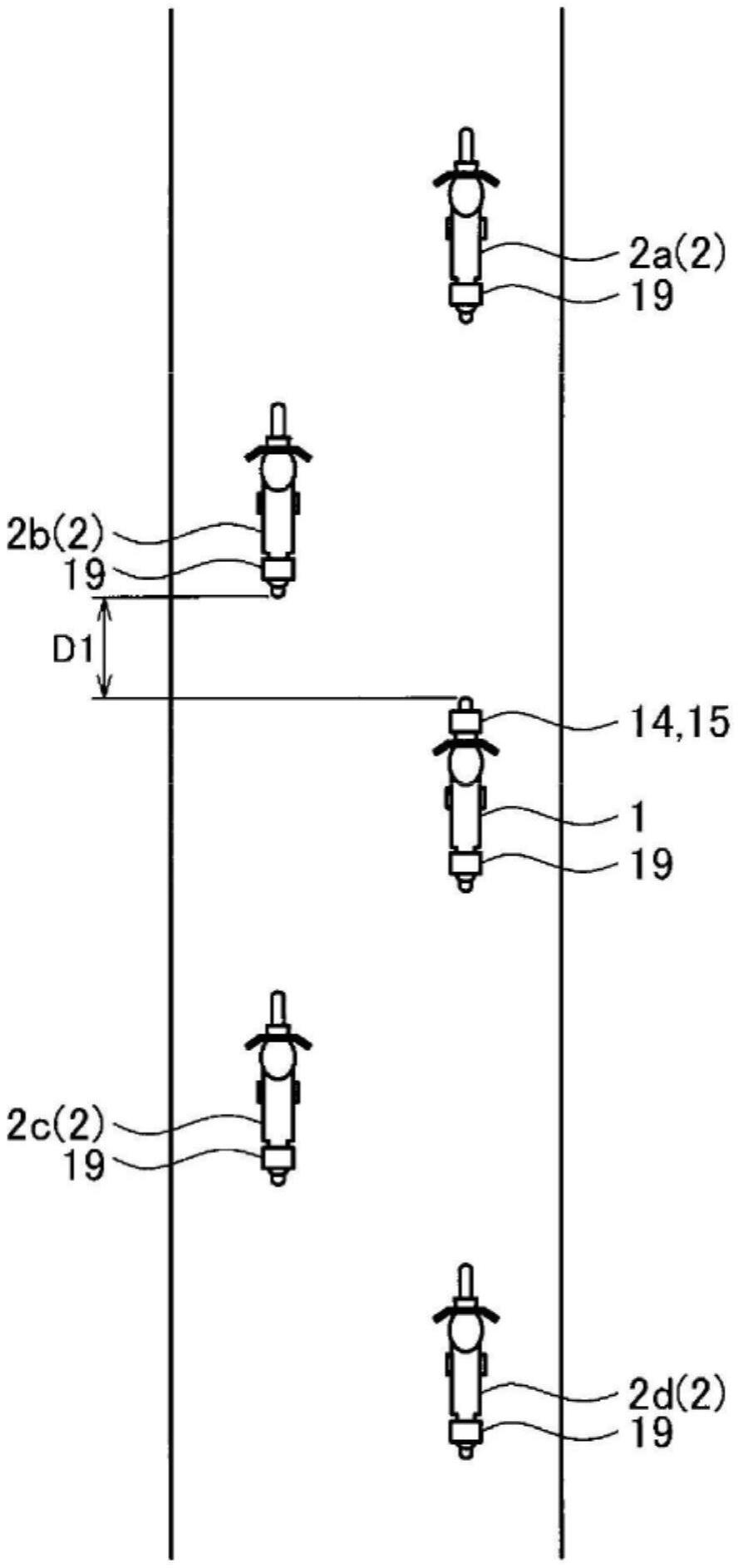
2、可是,作为用来辅助驾驶的技术,有自适应巡航控制,所述自适应巡航控制不依赖于由驾驶者进行的加减速操作而自动地控制车辆的速度,进行将与目标车辆的车间距离维持为目标距离的车间距离维持控制。可以考虑将这样的自适应巡航控制应用于摩托车。自适应巡航控制根据本车辆的周围的交通状况而适当地被执行是重要的。这里,有进行由多个摩托车构成的组行驶的成组行驶的情况。在进行成组行驶的情况下,与不进行成组行驶的情况相比,本车辆的周围的交通状况不同。于是,希望用于使这样的成组行驶中的自适应巡航控制恰当化的提案。
3、本发明是以上述的课题为背景做出的,得到在成组行驶中能够使自适应巡航控制恰当化的控制装置及控制方法。
4、用来解决课题的手段
5、本发明所涉及的控制装置是对摩托车的举动进行控制的控制装置,具备执行部,所述执行部基于前述摩托车的周围环境信息,执行自适应巡航控制,所述自适应巡航控制不依赖于由前述摩托车的骑乘者进行的加减速操作而自动地控制前述摩托车的速度,进行将前述摩托车与目标车辆的车间距离维持为目标距离的车间距离维持控制;还具备:取得部,基于搭载在本车辆的照相机的输出结果,取得摄像数据,所述摄像数据拍摄有在与前述本车辆同一组实施由多个摩托车构成的组行驶的成组行驶中的其他车辆;以及确定部,基于由前述取得部取得的前述摄像数据,确定前述其他车辆;前述执行部基于由前述确定部确定的前述其他车辆的行驶状态信息,执行在前述成组行驶中进行的前述自适应巡航控制的模式即成组行驶模式。
6、本发明所涉及的控制方法是摩托车的举动的控制方法,控制装置的执行部基于前述摩托车的周围环境信息,执行自适应巡航控制,所述自适应巡航控制不依赖于由前述摩托车的骑乘者进行的加减速操作而自动地控制前述摩托车的速度,进行将前述摩托车与目标车辆的车间距离维持为目标距离的车间距离维持控制;进而,前述控制装置的取得部基于搭载在本车辆的照相机的输出结果,取得摄像数据,所述摄像数据拍摄有在与前述本车辆同一组实施由多个摩托车构成的组行驶的成组行驶中的其他车辆;前述控制装置的确定部基于由前述取得部取得的前述摄像数据,确定前述其他车辆;前述执行部基于由前述确定部确定的前述其他车辆的行驶状态信息,执行在前述成组行驶中进行的前述自适应巡航控制的模式即成组行驶模式。
7、发明效果
8、在本发明所涉及的控制装置及控制方法中,控制装置的执行部基于摩托车的周围环境信息,执行自适应巡航控制,所述自适应巡航控制不依赖于由摩托车的骑乘者进行的加减速操作而自动地控制摩托车的速度,进行将摩托车与目标车辆的车间距离维持为目标距离的车间距离维持控制;进而,控制装置的取得部基于搭载在本车辆的照相机的输出结果,取得摄像数据,所述摄像数据拍摄有在与本车辆同一组实施由多个摩托车构成的组行驶的成组行驶中的其他车辆;控制装置的确定部基于由取得部取得的摄像数据,确定其他车辆;执行部基于由确定部确定的其他车辆的行驶状态信息,执行在成组行驶中进行的自适应巡航控制的模式即成组行驶模式。由此,在进行成组行驶的情况下,能够根据本车辆的周围的交通状况而适当地执行成组行驶模式。所以,在成组行驶中能够适当地执行摩托车的自适应巡航控制。
技术特征:
1.一种控制装置,是对摩托车(1)的举动进行控制的控制装置(20),其特征在于,
2.如权利要求1所述的控制装置,其特征在于,
3.如权利要求2所述的控制装置,其特征在于,
4.如权利要求1~3中任一项所述的控制装置,其特征在于,
5.如权利要求4所述的控制装置,其特征在于,
6.如权利要求4或5所述的控制装置,其特征在于,
7.如权利要求4~6中任一项所述的控制装置,其特征在于,
8.如权利要求4~7中任一项所述的控制装置,其特征在于,
9.如权利要求4~8中任一项所述的控制装置,其特征在于,
10.如权利要求4~9中任一项所述的控制装置,其特征在于,
11.如权利要求10所述的控制装置,其特征在于,
12.如权利要求4~11中任一项所述的控制装置,其特征在于,
13.如权利要求4~11中任一项所述的控制装置,其特征在于,
14.一种控制方法,是摩托车(1)的举动的控制方法,其特征在于,
技术总结
本发明得到在成组行驶中能够使自适应巡航控制恰当化的控制装置及控制方法。在本发明所涉及的控制装置(20)及控制方法中,控制装置(20)的执行部基于摩托车(1)的周围环境信息,执行自适应巡航控制;进而,控制装置(20)的取得部基于搭载在本车辆(1)的照相机(15)的输出结果,取得摄像数据,所述摄像数据拍摄有在与本车辆(1)同一组实施由多个摩托车构成的组行驶的成组行驶中的其他车辆;控制装置(20)的确定部基于由取得部取得的摄像数据,确定其他车辆;执行部基于由确定部确定的其他车辆的行驶状态信息,执行在成组行驶中进行的自适应巡航控制的模式即成组行驶模式。
技术研发人员:井苅佳秀,立石纯大
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!