用于基于目标车辆调节在车行道上通行的车辆的速度的调节方法与流程
本发明要求于2021年6月8日提交的法国申请2106019的优先权,该申请的内容(文本、附图和权利要求)通过引用并入本文。本发明涉及用于当车辆改变通行车道时基于目标车辆调节车辆(尤其是机动车辆)的速度的调节方法和调节装置。
背景技术:
1、随着道路网络的发展以及通行车道数量的增加,道路安全性成为人们关注的重要问题。事实上,随着道路网络上增加的车辆的数量,发生碰撞的风险增加,尤其是在具有多个通行车道的车行道上。
2、为了改善道路安全性,一些车辆装备有驾驶辅助功能或驾驶辅助系统(称作adas(英文为“advanced driver-assistance system”))。为了确保这些驾驶辅助系统的良好运行,对于围绕所述车辆的环境的良好认识是必需的。
3、在车辆中通常使用的这些adas系统中的一个是acc自适应速度调节器(英文为“adaptive cruise control”)。acc调节器是一种电子装备,该电子装备提高了乘员和更通常地在城市地区中、在道路上或高速公路上通行的其它使用者的舒适性和安全性。除了常规速度调节功能之外,acc调节器还根据存在于自身前方的车辆流适配车辆的速度。为此,传感器安装在车辆的前部处,以监视存在于自身前方的车辆流。当该传感器在其作用场中检测到在自身前方以较低速度通行的目标车辆时,所述acc调节器停用速度调节(其服从于设定速度),并且减少所述车辆的速度,以与所述目标车辆维持足够安全的距离。在需要时,所述acc调节器可激活制动命令。在所述目标车辆改变通行车道或加速的情况下,所述acc调节器可增加所述车辆的速度直到达到所述设定速度,并且可激活所述速度调节(其再次服从于该设定速度)。
4、从文件us2013/345944已知一种用于为车辆的距离辅助系统生成控制参数的生成方法和生成装置。从文件us2017/123430已知一种在主车辆的车道改变期间对于在小道上的目标车辆的选取。从文件de19637245已知一种用于调节车辆的速度的自适应调节方法。从文件us2019/061819已知一种用于在通行车道改变期间生成轨迹的系统和方法。当车辆(其速度由acc调节器调节)改变通行车道时,当多个车辆行进在该车辆前方时,可能会出现目标车辆选择问题:当所述车辆想改变通行车道时,其中一个车辆在所述车辆所通行在的通行车道上并且另一个车辆在所述车辆将通行在的通行车道上。挑选这两个车辆中的一个作为目标车辆,该挑选需要大量的计算资源(其超出了当前的acc调节器的能力)。
5、问题在于当该车辆正在改变通行车道时如何为车辆的自适应速度调节挑选目标车辆。
技术实现思路
1、本发明的目标在于改善对于车辆的环境的认识。
2、本发明的另一目标在于改善所述车辆的自适应速度调节。
3、本发明的另一目标在于改善道路安全性。
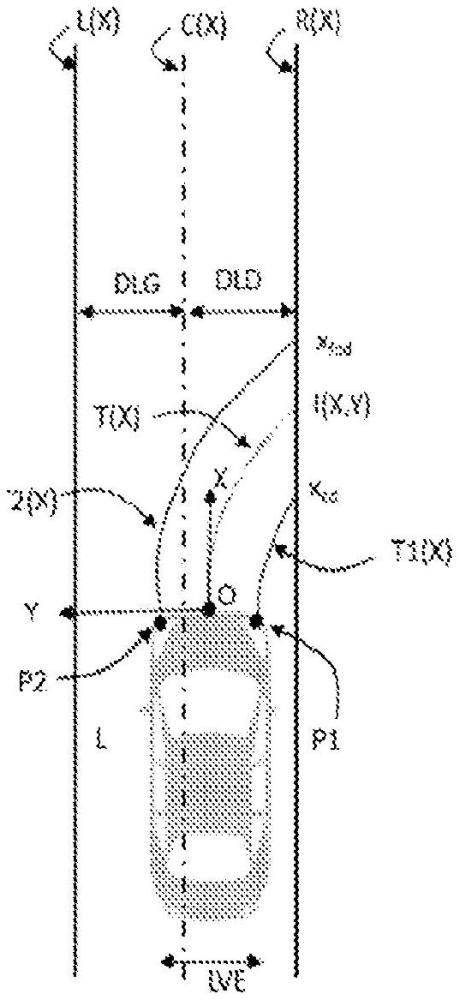
4、根据第一方面,本发明涉及一种用于基于目标车辆调节在车行道上通行的车辆的速度的调节方法,所述车行道包括第一通行车道和第二通行车道,所述第一通行车道和所述第二通行车道允许车辆沿相同方向通行。所述方法由至少一个处理器实施,并且包括:获取步骤,该获取步骤用于基于所述车辆的经装载的摄像机获取所述车辆所通行在的第一通行车道的中心的在所述车辆的参考系中表达的几何表示(représentation géométrique);确定步骤,该确定步骤用于通过使所述第一通行车道的中心的几何表示平移等于所述第一通行车道的半个宽度的值来确定所述第一通行车道的右侧线和左侧线的在所述车辆的参考系中表达的几何表示;确定步骤,该确定步骤用于确定所述车辆的中心点的轨迹的在所述车辆的参考系中表达的几何表示;确定步骤,该确定步骤用于通过使所述车辆的中心点的轨迹的几何表示相对于所述车辆的参考系负向平移所述车辆的半个宽度来确定所述车辆的第一点的第一轨迹的在所述车辆的参考系中表达的几何表示;确定步骤,该确定步骤用于通过使所述车辆的中心点的轨迹的几何表示相对于所述车辆的参考系正向平移所述车辆的半个宽度来确定所述车辆的第二点的第二轨迹的在所述车辆的参考系中表达的几何表示;确定步骤,该确定步骤用于确定在所述第一轨迹的几何表示与所述右侧线或所述左侧线的几何表示之间的第一交点;确定步骤,该确定步骤用于确定在所述第二轨迹的几何表示与所述右侧线或所述左侧线的几何表示之间的第二交点;确定步骤,该确定步骤用于确定在所述第一交点与所述车辆的第一点之间的第一跨越距离以及在所述第二交点与所述车辆的第三点之间的第二跨越距离;以及比较步骤,该比较步骤用于对所述第一跨越距离和所述第二跨越距离与阈值进行比较,当至少所述第一跨越距离或至少所述第二跨越距离小于阈值时,所述车辆的速度基于在所述第二通行车道上通行的目标车辆调节。
5、根据非限制性特别示例,所述通行车道的中心的几何表示取决于由所述摄像机检测到的地面标记。
6、根据非限制性特别示例,所述几何表示是多项式。
7、根据非限制性特别示例,所述车辆的中心点与所述车辆的参考系的原点重合。
8、根据非限制性特别示例,所述第一点和所述第二点位于在所述车辆的前部上。
9、根据非限制性特别示例,所述车辆的第三点基于所述第二点和所述车辆的长度限定。
10、根据第二方面,本发明涉及一种用于基于目标车辆调节车辆的速度的调节装置,所述装置包括存储器,所述存储器与至少一个处理器相关联,所述至少一个处理器配置用于实施根据本发明第一方面的方法的步骤。
11、根据第三方面,本发明涉及一种车辆(例如,机动类型的车辆),所述车辆包括如上文描述的根据本发明第二方面的装置。
12、根据第四方面,本发明涉及一种电脑程序,所述电脑程序包括指令,所述指令适用于尤其是在所述电脑程序由至少一个处理器执行时执行根据本发明第一方面的方法的步骤。
13、这种电脑程序可使用任何编程语言,并且呈现源代码、目标代码或在源代码与目标代码之间的中间代码的形式,例如具有经部分编译的形式或任何其它期望的形式。
14、根据第五方面,本发明涉及一种由电脑可读的记录介质,所述记录介质上记录有一种电脑程序,所述电脑程序包括指令,所述指令用于执行根据本发明第一方面的方法的步骤。
15、一方面,所述记录介质可以是任何能够存储所述程序的实体或装置。例如,所述介质可包括存储部件(例如,rom存储器、cd-rom或微电子电路类型的rom存储器又或磁记录部件或硬盘)。
16、另一方面,所述记录介质还可以是例如电气信号或光学信号的可传输介质,这种信号可经由电气线缆或光学线缆通过常规无线电或赫兹无线电或通过自导向激光束或通过其它方式导向。根据本发明的电脑程序可特别是通过因特网类型的网络进行下载。
17、可替代地,所述记录介质可以是集成电路,在所述集成电路中并入有所述电脑程序,所述集成电路适用于执行所讨论的方法或者经使用在所讨论的方法的执行中。
技术特征:
1.一种用于基于目标车辆调节在车行道上通行的车辆(101)的速度的调节方法,所述车行道包括第一通行车道(10)和第二通行车道(20),所述第一通行车道和所述第二通行车道允许车辆(102,103)沿相同方向通行,所述调节方法由至少一个处理器实施,所述调节方法包括以下步骤:
2.根据权利要求1所述的调节方法,其中,所述通行车道的中心的几何表示取决于由所述摄像机检测到的地面标记。
3.根据权利要求1或2所述的调节方法,其中,所述几何表示是多项式。
4.根据上述权利要求中任一项所述的调节方法,其中,所述车辆的中心点与所述车辆的参考系的原点重合。
5.根据上述权利要求中任一项所述的调节方法,其中,所述第一点(p1)和所述第二点(p2)位于在所述车辆的前部上。
6.根据上述权利要求中任一项所述的调节方法,其中,所述车辆的第三点(p3)基于所述第二点(p2)和所述车辆的长度(l°限定。
7.一种电脑程序,所述电脑程序包括指令,所述指令用于在这些指令由处理器执行时实施根据上述权利要求中任一项所述的调节方法。
8.一种由电脑可读的记录介质,在所述记录介质上记录有电脑程序,所述电脑程序包括指令,所述指令用于执行根据权利要求1至6中任一项所述的调节方法的步骤。
9.一种用于基于目标车辆调节在车行道上通行的车辆的速度的调节装置(2),所述调节装置(2)包括存储器(21),所述存储器与至少一个处理器(20)相关联,所述至少一个处理器配置用于实施根据权利要求1至6中任一项所述的调节方法的步骤。
10.一种车辆(101),所述车辆包括根据权利要求9所述的调节装置(2)。
技术总结
本发明涉及一种用于调节在车行道上通行的车辆的自适应速度的调节方法和调节装置,所述车行道包括第一通行车道和第二通行车道,所述第一通行车道和所述第二通行车道允许车辆沿相同方向通行。所述方法包括:通过使所述第一通行车道的中心的几何表示平移等于所述第一通行车道的半个宽度的值,确定(31)所述第一通行车道的右侧线和左侧线的几何表示;由所述车辆的特别点确定(37)相对于所述车行道的右侧线或左侧线的第一跨越距离和第二跨越距离;当至少所述第一跨越距离或至少所述第二跨越距离小于阈值时(38),所述车辆的速度基于在所述第二通行车道上通行的目标车辆调节。
技术研发人员:Z·拉赫卢,H·埃尔汉巴里,M·艾特阿里,I·阿布埃西尔,B·阿布立塞恩
受保护的技术使用者:斯特兰蒂斯汽车集团
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!