用于估计自动驾驶的航向和偏航率的系统和方法与流程
总体上涉及车辆运动控制系统,并且更具体地涉及基于用于轨迹跟踪的航向和偏航率控制参考来改进运动控制系统性能。
背景技术:
1、常规的航向和偏航率参考将设定为与目标轨迹航向和轨迹曲率相等。航向参考有时会增加一个稳态侧滑角,以补偿弯道跟踪期间非零的相对偏航角。这些方法假设参考是准稳定的,并且仅在公路驾驶期间有效。在低速机动中,有限的偏航加速度和侧滑变化率是很重要的。
2、因此,期望为轨迹跟踪提供改进的航向和偏航率参考。还期望使用轨迹跟踪来改进使用轨迹跟踪的运动控制。此外,根据随后的详细描述和所附的权利要求,结合附图及前述的技术领域和背景技术,本公开的其他期望的特征和特性将变得显而易见。
技术实现思路
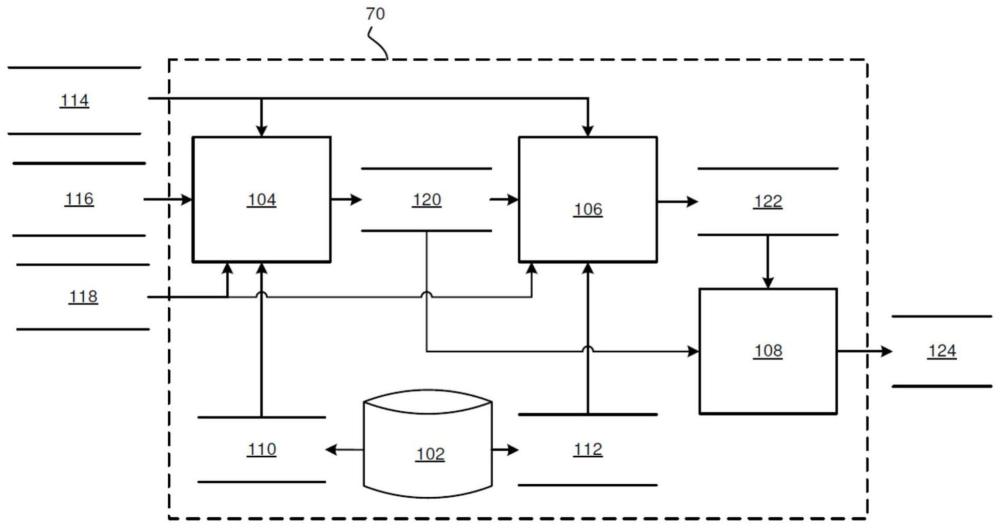
1、车辆中设置有运动控制系统。在一个实施例中,运动控制系统包括控制器。该控制器被配置为:接收与自主车辆的即将到来的轨迹相关联的目标轨迹数据;基于目标轨迹数据的数值积分而确定与即将到来的目标轨迹相关联的偏航率参考和相对航向参考;以及基于偏航率参考和相对航向参考而控制自主车辆的轨迹。
2、在各种实施例中,目标轨迹数据包括期望的车辆速度。
3、在各种实施例中,目标轨迹数据包括轨迹曲率。
4、在各种实施例中,目标轨迹数据包括道路倾斜角。
5、在各种实施例中,数值积分基于自行车模型。
6、在各种实施例中,偏航率参考的数值积分基于:
7、
8、其中,vx表示期望速度,表示期望轨迹,φ表示道路倾斜角,ψ表示偏航率参考,m表示自主车辆的质量,g表示重力,cr表示后轮胎上的侧偏刚度,l表示车辆轴距,lr表示后轴和重心之间的距离,izz表示相对于垂直轴的车辆惯性矩,并且lf表示前轴和重心之间的距离。
9、在各种实施例中,相对航向参考的数值积分基于:
10、
11、其中,β表示相对航向,vx表示期望速度,表示期望轨迹,φ表示道路倾斜角,ψ表示偏航率参考,m表示自主车辆的质量,g表示重力,cr表示后轮胎上的侧偏刚度,l表示车辆轴距,lr表示后轴和重心之间的距离,izz表示相对于垂直轴的车辆惯性矩,并且lf表示前轴和重心之间的距离。
12、在另一个实施例中,一种方法包括:由处理器接收与自主车辆的即将到来的轨迹相关联的目标轨迹数据;由处理器基于目标轨迹数据的数值积分而确定与即将到来的目标轨迹相关联的偏航率参考和相对航向参考;以及由处理器基于偏航率参考和相对航向参考而控制自主车辆的轨迹。
13、在各种实施例中,目标轨迹数据包括期望的车辆速度。
14、在各种实施例中,目标轨迹数据包括轨迹曲率。
15、在各种实施例中,目标轨迹数据包括道路倾斜角。
16、在各种实施例中,数值积分基于自行车模型。
17、在各种实施例中,偏航率参考的数值积分基于:
18、
19、其中,vx表示期望速度,表示期望轨迹,φ表示道路倾斜角,ψ表示偏航率参考,m表示自主车辆的质量,g表示重力,cr表示后轮胎上的侧偏刚度,l表示车辆轴距,lr表示后轴和重心之间的距离,izz表示相对于垂直轴的车辆惯性矩,并且lf表示前轴和重心之间的距离。
20、在各种实施例中,相对航向参考的数值积分基于:
21、
22、其中,β表示相对航向,vx表示期望速度,表示期望轨迹,φ表示道路倾斜角,ψ表示偏航率参考,m表示自主车辆的质量,g表示重力,cr表示后轮胎上的侧偏刚度,l表示车辆轴距,lr表示后轴和重心之间的距离,izz表示相对于垂直轴的车辆惯性矩,并且lf表示前轴和重心之间的距离。
23、在另一个实施例中,提供了一种使用编程指令编码的非暂时性计算机可读介质,该编程指令可配置为使车辆中的控制器执行运动控制方法。该方法包括:接收与自主车辆的即将到来的轨迹相关联的目标轨迹数据;基于目标轨迹数据的数值积分而确定与即将到来的目标轨迹相关联的偏航率参考和相对航向参考;以及基于偏航率参考和相对航向参考而控制自主车辆的轨迹。
24、在各种实施例中,目标轨迹数据包括期望的车辆速度、轨迹曲率和道路倾斜角。
25、在各种实施例中,数值积分基于自行车模型。
26、在各种实施例中,偏航率参考的数值积分基于:
27、
28、并且其中,相对航向参考的数值积分基于:
29、
30、其中,vx表示期望速度,表示期望轨迹,φ表示道路倾斜角,ψ表示偏航率参考,m表示自主车辆的质量,g表示重力,cr表示后轮胎上的侧偏刚度,l表示车辆轴距,lr表示后轴和重心之间的距离,izz表示相对于垂直轴的车辆惯性矩,并且lf表示前轴和重心之间的距离。
31、在各种实施例中,基于检测到的滚动时域执行数值积分,并且在时域开始时和在运动控制的每个循环时间重新初始化数值积分的初始条件。
32、在各种实施例中,沿着滚动时域彼此独立地对每个点执行数值积分,并且在运动控制开始时重新初始化数值积分的初始条件。
技术特征:
1.一种在车辆中进行运动控制的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,所述目标轨迹数据包括期望的车辆速度、轨迹曲率和道路倾斜角。
3.根据权利要求1所述的方法,其中,所述偏航率参考的所述数值积分基于:
4.根据权利要求1所述的方法,其中,所述相对航向参考的所述数值积分基于:
5.一种使用编程指令编码的非暂时性计算机可读介质,所述编程指令可配置为使车辆中的控制器执行运动控制方法,所述方法包括:
6.根据权利要求5所述的非暂时性计算机可读介质,其中,所述目标轨迹数据包括道路倾斜角、期望的车辆速度和轨迹曲率。
7.根据权利要求5所述的非暂时性计算机可读介质,其中,所述数值积分基于自行车模型。
8.根据权利要求5所述的非暂时性计算机可读介质,其中,所述偏航率参考的所述数值积分基于:
9.根据权利要求8所述的非暂时性计算机可读介质,其中,基于检测到的滚动时域执行所述数值积分,并且其中,在所述时域开始时和在所述运动控制的每个循环时间重新初始化所述数值积分的初始条件。
10.根据权利要求8所述的非暂时性计算机可读介质,其中,沿着滚动时域彼此独立地对每个点执行所述数值积分,并且其中,在所述运动控制开始时重新初始化所述数值积分的初始条件。
技术总结
车辆中设置有运动控制系统和方法。在一个实施例中,运动控制系统包括控制器。该控制器被配置为:接收与自主车辆的即将到来的轨迹相关联的目标轨迹数据;基于目标轨迹数据的数值积分而确定与即将到来的目标轨迹相关联的偏航率参考和相对航向参考;以及基于偏航率参考和相对航向参考而控制自主车辆的轨迹。
技术研发人员:A·苏伊萨,吉米·卢
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!