充电机器人的充电控制方法及装置、存储介质、设备与流程
本申请涉及电动汽车充电,尤其是涉及到一种充电机器人的充电控制方法及装置、存储介质、计算机设备。
背景技术:
1、随着电动汽车行业的快速发展,当前购买电动汽车的用户越来越多,与此同时,电动汽车的充电需求也逐渐增加。然而在某些特定区域例如露天停车场、地下停车库等,由于充电桩的数量有限,因此往往并不能满足电动汽车的充电需求。在此背景下,充电机器人应运而生。
2、充电机器人的出现,可以大大缓解停车场、停车库等场所的充电需求。当电动汽车有充电需求时,可以对应确定一辆充电机器人为该电动汽车充电。充电机器人可以自行移动到电动汽车的充电位置,并自主为电动汽车充电,因此保证充电机器人上充电口与电动汽车上充电孔之间的精准对准非常重要。
3、现有技术中,充电机器人在对电动汽车进行充电时,通常仅进行一次对准即充电,这种方法一方面容易出现对准误差,导致充电机器人充电口插入电动汽车时,充电机器人的充电口或者电动汽车上的充电孔损坏;另一方面容易出现误匹配的情况,例如对于交流充电孔来说,容易出现旋转45°之后的误匹配。
技术实现思路
1、有鉴于此,本申请提供了一种充电机器人的充电控制方法及装置、存储介质、计算机设备,通过两次对准,第一次仅利用待充电车辆上的部分充电孔进行对准,第二次利用待充电车辆上的全部充电孔进行对准,不仅大大降低了对准误差,还可以避免出现误匹配的情况,有利于保证充电的安全性。
2、根据本申请的一个方面,提供了一种充电机器人的充电控制方法,包括:
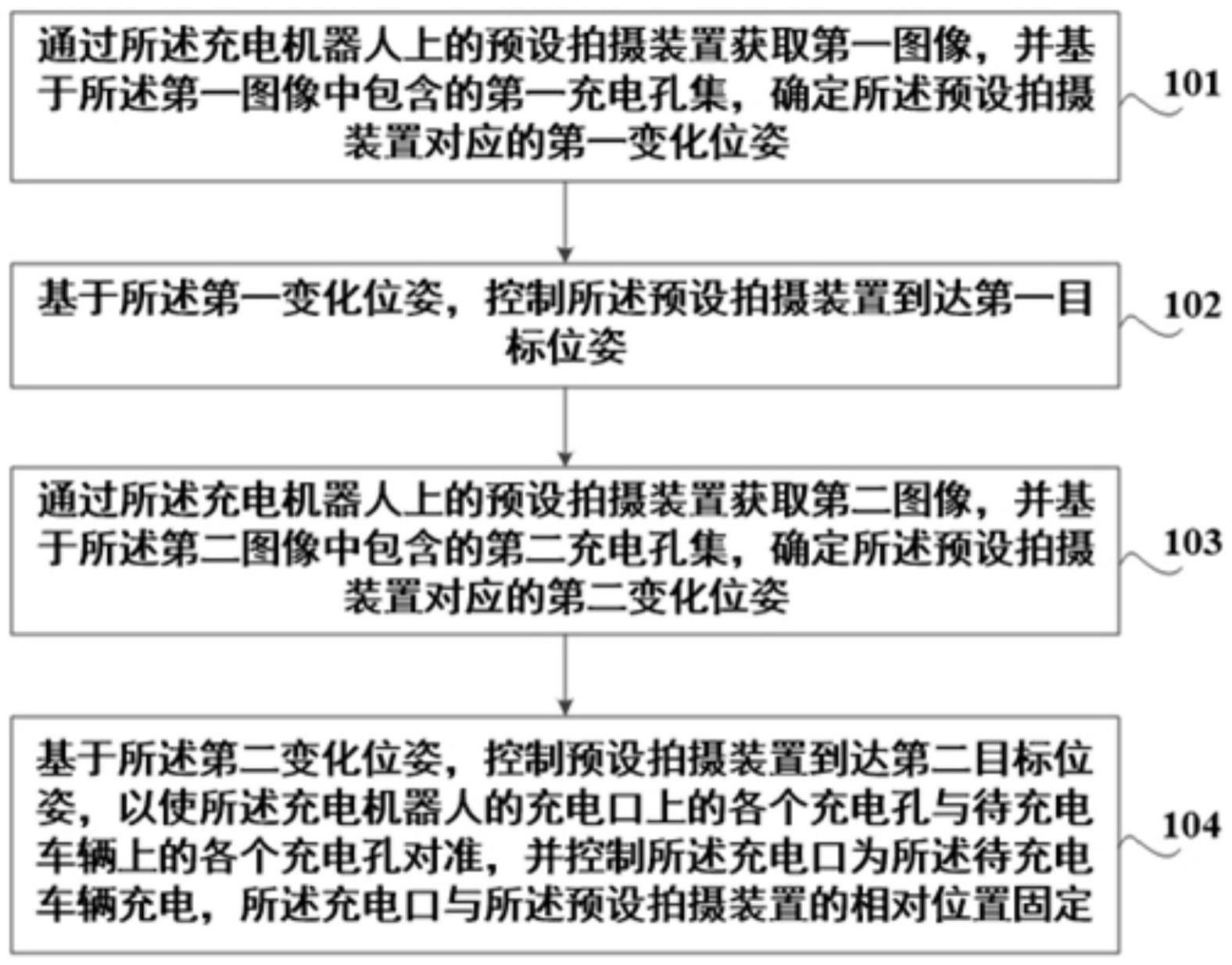
3、通过所述充电机器人上的预设拍摄装置获取第一图像,并基于所述第一图像中包含的第一充电孔集,确定所述预设拍摄装置对应的第一变化位姿;
4、基于所述第一变化位姿,控制所述预设拍摄装置到达第一目标位姿;
5、通过所述充电机器人上的预设拍摄装置获取第二图像,并基于所述第二图像中包含的第二充电孔集,确定所述预设拍摄装置对应的第二变化位姿;
6、基于所述第二变化位姿,控制所述预设拍摄装置到达第二目标位姿,以使所述充电机器人的充电口上的各个充电孔与待充电车辆上的各个充电孔对准,并控制所述充电口为所述待充电车辆充电,所述充电口与所述预设拍摄装置的相对位置固定。
7、根据本申请的另一方面,提供了一种充电机器人的充电控制装置,包括:
8、第一图像获取模块,用于通过所述充电机器人上的预设拍摄装置获取第一图像,并基于所述第一图像中包含的第一充电孔集,确定所述预设拍摄装置对应的第一变化位姿;
9、第一控制模块,用于基于所述第一变化位姿,控制所述预设拍摄装置到达第一目标位姿;
10、第二图像获取模块,用于通过所述充电机器人上的预设拍摄装置获取第二图像,并基于所述第二图像中包含的第二充电孔集,确定所述预设拍摄装置对应的第二变化位姿;
11、第二控制模块,用于基于所述第二变化位姿,控制所述预设拍摄装置到达第二目标位姿,以使所述充电机器人的充电口上的各个充电孔与待充电车辆上的各个充电孔对准,并控制所述充电口为所述待充电车辆充电,所述充电口与所述预设拍摄装置的相对位置固定。
12、依据本申请又一个方面,提供了一种存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述充电机器人的充电控制方法。
13、依据本申请再一个方面,提供了一种计算机设备,包括存储介质、处理器及存储在存储介质上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述充电机器人的充电控制方法。
14、依据本申请再一个方面,提供了一种充电机器人,包括上述充电机器人的充电控制装置。
15、借由上述技术方案,本申请提供的一种充电机器人的充电控制方法及装置、存储介质、计算机设备,可以通过充电机器人上设置的预设拍摄装置对待充电车辆的充电孔部位进行拍摄,从而可以对应获取第一图像,第一图像中可以包括第一充电孔集。接着,可以根据第一图像中包含的第一充电孔集,确定出预设拍摄装置对应的第一变化位姿。确定第一变化位姿之后,可以控制预设拍摄装置到达第一目标位姿。之后,可以再次通过预设拍摄装置对待充电车辆的充电孔部位进行拍摄,从而可以对应获取第二图像,在这里,第二图像中可以包括第二充电孔集,第二充电孔集具体可以是全部充电孔。根据第二图像中的第二充电孔集,可以确定出此时预设拍摄装置对应的第二变化位姿。确定了预设拍摄装置对应的第二变化位姿后,可以控制预设拍摄装置到达第二目标位姿。当预设拍摄装置到达第二目标位姿时,充电口上的充电孔与待充电车辆上的充电孔之间已经一一精准对准,仅在沿着预设方向上留有预设距离。本申请实施例通过两次对准,第一次仅利用待充电车辆上的部分充电孔进行对准,第二次利用待充电车辆上的全部充电孔进行对准,不仅大大降低了对准误差,还可以避免出现误匹配的情况,有利于保证充电的安全性。
16、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种充电机器人的充电控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述第一图像包括第一彩色图像以及第一深度图像;所述基于所述第一图像中包含的第一充电孔集,确定所述预设拍摄装置对应的第一变化位姿,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述第一充电孔集,从所述第一深度图像中确定所述第一充电孔集中每个点云点对应的第一位置坐标,包括:
4.根据权利要求2所述的方法,其特征在于,所述依据每个点云点对应的第一位置坐标,以及第一点云模板,确定所述预设拍摄装置对应的第一变化位姿,包括:
5.根据权利要求1所述的方法,其特征在于,所述第二图像包括第二彩色图像以及第二深度图像;所述基于所述第二图像中包含的第二充电孔集,确定所述预设拍摄装置对应的第二变化位姿,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述第二充电孔集,从所述第二深度图像中确定所述第二充电孔集中每个点云点对应的第二位置坐标,包括:
7.根据权利要求1所述的方法,其特征在于,所述控制所述充电口为所述待充电车辆充电,包括:
8.一种充电机器人的充电控制装置,其特征在于,包括:
9.一种存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法。
10.一种计算机设备,包括存储介质、处理器及存储在存储介质上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法。
技术总结
本申请公开了一种充电机器人的充电控制方法及装置、存储介质、计算机设备,该方法包括:通过充电机器人上的预设拍摄装置获取第一图像,并基于第一图像中包含的第一充电孔集,确定预设拍摄装置对应的第一变化位姿;基于所述第一变化位姿,控制所述预设拍摄装置到达第一目标位姿;通过所述充电机器人上的预设拍摄装置获取第二图像,并基于所述第二图像中包含的第二充电孔集,确定所述预设拍摄装置对应的第二变化位姿;基于所述第二变化位姿,控制所述预设拍摄装置到达第二目标位姿,以使所述充电机器人的充电口上的各个充电孔与待充电车辆上的各个充电孔对准,并控制所述充电口为所述待充电车辆充电,所述充电口与所述预设拍摄装置的相对位置固定。
技术研发人员:李建朋,蒋亚西,岳川元,金梦磊,李成杰
受保护的技术使用者:浙江安吉智电控股有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!