一种基于三次B样条曲线的车辆换道轨迹规划方法
本发明涉及车辆换道轨迹规划,特别是一种基于三次b样条曲线的车辆换道轨迹规划方法。
背景技术:
1、车辆换道轨迹规划作为智能驾驶车辆常见功能之一,能有效减少交通事故。合理的轨迹规划方法是完成高效换道的先决条件,直接影响换道的安全性和舒适性。常见的换道轨迹规划算法有基于搜索的算法,基于采样的算法,基于曲线插值的算法等。基于搜索的算法如dijkstra可以在有向图中获得最短路径,但存在实时性差的缺点;基于采样的算法如rrt(快速搜索随机树)能够处理多维的规划问题,但在换道轨迹规划过程中无法实现重规划;基于曲线插值的算法如多项式曲线,受限于终端状态已知的轨迹规划情况。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于三次b样条曲线的车辆换道轨迹规划方法,实现提高智能驾驶车辆在换道时的安全性与舒适性,且计算步骤简单,降低了智能驾驶车辆在换道时的计算复杂度。
2、为实现上述目的,本发明采用如下技术方案:一种基于三次b样条曲线的车辆换道轨迹规划方法,包括如下步骤:
3、步骤1:确定三次b样条曲线为车辆换道轨迹规划方法,基于所述三次b样条曲线设定六个控制点坐标参数;
4、步骤2:根据六个控制点坐标参数及三次b样条曲线表达式生成换道候选轨迹;
5、步骤3:以换道轨迹曲率为评价指标筛选得到最终轨迹。
6、在一较佳的实施例中,所述步骤1具体包括:
7、步骤11:设定车辆当前位置为p0控制点;
8、步骤12:设置p1、p2、p3、p4以及p5控制点,使其满足p0p1p2∥p3p4p5∥车道中心线,同时设定p0p1=p1p2=p3p4=p4p5以减少计算成本;
9、在一较佳的实施例中,所述步骤2具体包括:
10、步骤21:b样条曲线表达式为:
11、
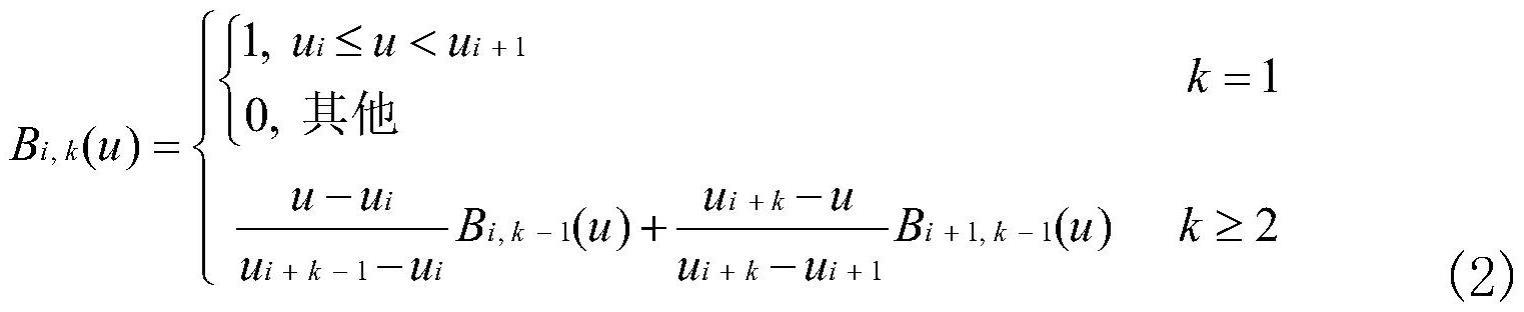
12、其中,p0,p1,…,pn为n+1个控制点坐标,bi,k(u)是第i个k阶b样条基函数,u∈[0,1],基函数bi,k(u)德布尔-递推式如下:
13、
14、步骤22:将步骤1所述的六个控制点坐标参数带入三次b样条曲线表达式即可生成换道候选轨迹,候选轨迹方程表示为:
15、s(u)=s(x,y) (3)
16、其中x、y是定义在高斯坐标系下的轨迹点位置坐标,s是换道轨迹。
17、在一较佳的实施例中,所述步骤3具体包括以下步骤:
18、步骤31:计算步骤2所得候选轨迹曲率,曲率计算公式为:
19、
20、其中κ为曲率;
21、步骤32:筛选得到最终轨迹作为车辆换道轨迹。
22、与现有技术相比,本发明具有以下有益效果:本发明以三次b样条曲线作为车辆换道轨迹规划方法,提高了智能驾驶车辆在换道时的安全性与舒适性,且计算步骤简单,降低了智能驾驶车辆在换道时的计算复杂度。
技术特征:
1.一种基于三次b样条曲线的车辆换道轨迹规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于三次b样条曲线的车辆换道轨迹规划方法,其特征在于,所述步骤1具体包括:
3.根据权利要求1所述的一种基于三次b样条曲线的车辆换道轨迹规划方法,其特征在于,所述步骤2具体包括:
4.根据权利要求1所述的一种基于三次b样条曲线的车辆换道轨迹规划方法,其特征在于,所述步骤3具体包括以下步骤:
技术总结
本发明公开了一种基于三次B样条曲线的车辆换道轨迹规划方法,包括以下步骤:确定三次B样条曲线为车辆换道轨迹规划方法,基于所述三次B样条曲线设定六个控制点坐标参数;根据所述六个控评价指标筛选得到最优轨迹。应用本技术方案可提高智能驾驶车辆在换道时的安全性与舒适性,且计算步骤简单,降低了智能驾驶车辆在换道时的计算复杂度。
技术研发人员:沈磊,查云飞,李喆,陈越
受保护的技术使用者:福建工程学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!