一种过减速带的泊车控制方法及系统与流程
本发明涉及自动泊车,尤其涉及一种过减速带的泊车控制方法及系统。
背景技术:
1、自动泊车功能的核心包括传感器数据的感知、融合、决策规划、控制等部分。其中,控制是自动泊车效果的直接体现,在泊车过程中可能会碰到减速带,怎么舒适的通过减速带,可以提高泊车的体验感和舒适度。
2、自动泊车系统为了保证泊车系统的控制精度,在整个泊车控制过程中的车速在3km/h左右,由于车速很小如果碰到减速带可能会出现不能正常过减速带、车辆出现溜坡、停车等问题,降低了整个泊车过程的体验感和舒适度。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种过减速带的泊车控制方法及系统,提供一种简单、平稳、舒适过减速带的泊车控制方法。
2、根据本发明的第一方面,提供了一种过减速带的泊车控制方法,包括:
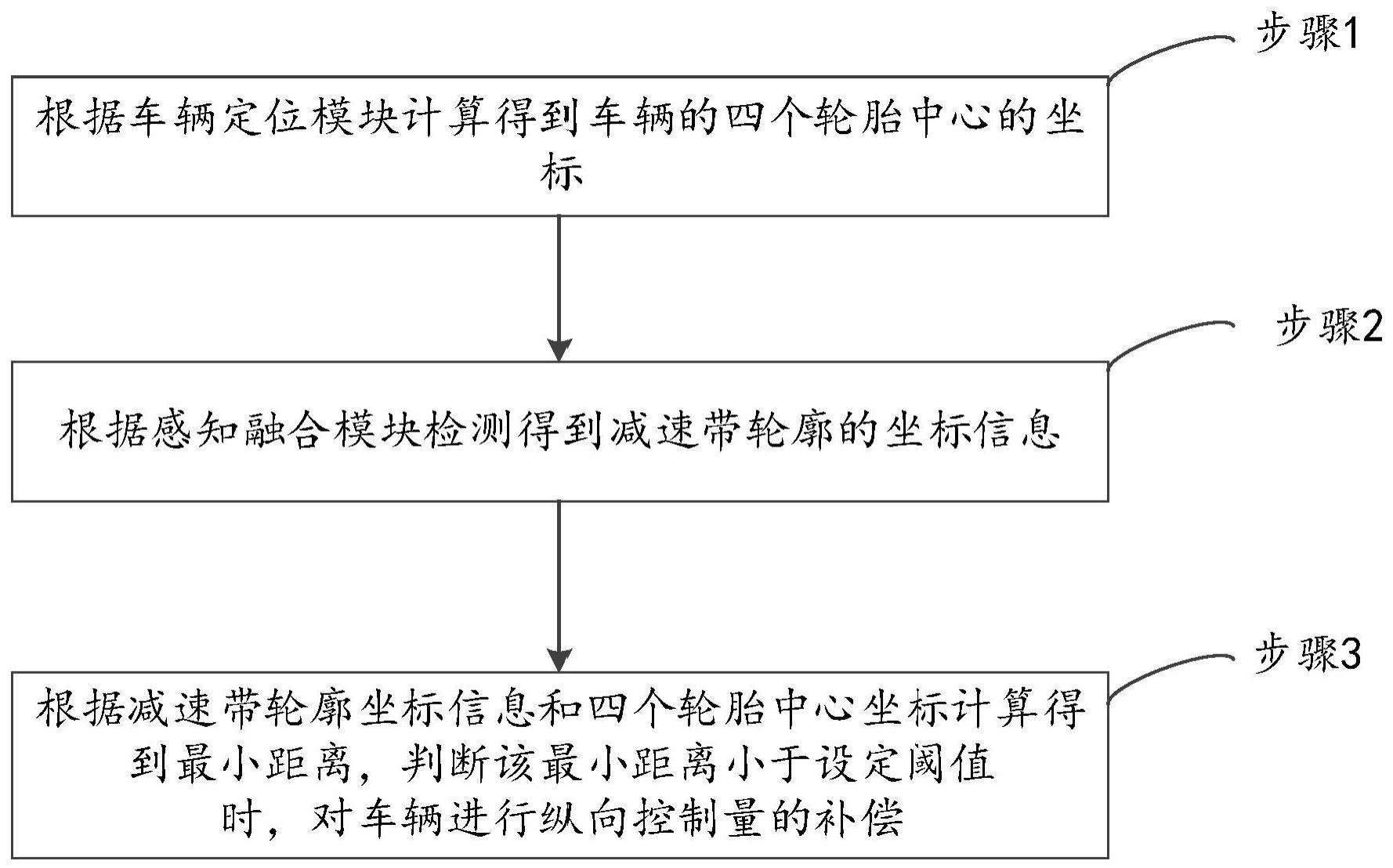
3、步骤1,根据车辆定位模块计算得到车辆的四个轮胎中心的坐标;
4、步骤2,根据感知融合模块检测得到减速带轮廓的坐标信息;
5、步骤3,根据所述减速带轮廓坐标信息和四个轮胎中心坐标计算得到最小距离,判断所述最小距离小于设定阈值时,对所述车辆进行纵向控制量的补偿。
6、在上述技术方案的基础上,本发明还可以作出如下改进。
7、可选的,所述步骤1之前还包括:
8、步骤0,通过实车测试确定不同车速下舒适过减速带的纵向控制量;
9、所述步骤3中根据该纵向控制量和车辆的实时速度对所述车辆进行纵向控制量的补偿。
10、可选的,所述纵向控制量为加减速度或者扭矩。
11、可选的,所述步骤1中通过定位模块得到后轮中心坐标,基于所述后轮中心坐标和车辆的轴长轴距计算得到车辆的四个轮胎中心的坐标点。
12、可选的,所述车辆后轴中心坐标cur为:(x,y,yaw),w为车辆轴距,l为车辆轴长,yaw表示车辆航向角;
13、后左轮中心坐标rl为:(x-sin(yaw)*(l/2),y+cos(yaw)*(l/2));
14、后右轮中心坐标rr为:(x+sin(yaw)*(l/2),y-cos(yaw)*(l/2));
15、前左轮中心坐标fl为:(x-sin(yaw)*(l/2)+cos(yaw)*w,y+cos(yaw)*(l/2)+sin(yaw)*w);
16、前右轮中心坐标fr为:(x+sin(yaw)*(l/2)+cos(yaw)*w,y-cos(yaw)*(l/2)+sin(yaw)*w)。
17、可选的,所述步骤3中所述设定阈值根据实车测试得到。
18、根据本发明的第二方面,提供一种过减速带的泊车控制系统,包括:
19、定位模块、感知融合模块、车身模块和纵向控制量补偿模块;
20、所述定位模块,用于获取车辆实时定位数据;
21、所述感知融合模块,用于获取减速带的数据;
22、所述车身模块,用于获取车辆的车速信息;
23、所述纵向控制量补偿模块,用于根据车辆定位模块的数据计算得到车辆的四个轮胎中心的坐标;
24、根据感知融合模块的减速带的数据计算得到减速带轮廓的坐标信息;
25、根据所述减速带轮廓坐标信息和四个轮胎中心坐标计算得到最小距离,判断所述最小距离小于设定阈值时,对所述车辆进行纵向控制量的补偿。
26、根据本发明的第三方面,提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现过减速带的泊车控制方法的步骤。
27、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现过减速带的泊车控制方法的步骤。
28、本发明提供的一种过减速带的泊车控制方法、系统、电子设备及存储介质,在到达减速带之前通过感知检测到减速带信息,提前计算纵向控制补偿量(加减速度或者扭矩),可以解决车身执行器的响应不及时,保证车辆不停车、舒适、平稳的经过减速带。
技术特征:
1.一种过减速带的泊车控制方法,其特征在于,所述泊车控制方法包括:
2.根据权利要求1所述的泊车控制方法,其特征在于,所述步骤1之前还包括:
3.根据权利要求1或2所述的泊车控制方法,其特征在于,所述纵向控制量为加减速度或者扭矩。
4.根据权利要求1所述的泊车控制方法,其特征在于,所述步骤1中通过定位模块得到后轮中心坐标,基于所述后轮中心坐标和车辆的轴长轴距计算得到车辆的四个轮胎中心的坐标点。
5.根据权利要求1或4所述的泊车控制方法,其特征在于,所述车辆后轴中心坐标cur为:(x,y,yaw),w为车辆轴距,l为车辆轴长,yaw表示车辆航向角;
6.根据权利要求1所述的泊车控制方法,其特征在于,所述步骤3中所述设定阈值根据实车测试得到。
7.一种过减速带的泊车控制系统,其特征在于,包括:定位模块、感知融合模块、车身模块和纵向控制量补偿模块;
8.一种电子设备,其特征在于,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现如权利要求1-6任一项所述的过减速带的泊车控制方法的步骤。
9.一种计算机可读存储介质,其特征在于,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现如权利要求1-6任一项所述的过减速带的泊车控制方法的步骤。
技术总结
本发明涉及一种过减速带的泊车控制方法及系统,该泊车控制方法包括:根据车辆定位模块计算得到车辆的四个轮胎中心的坐标;根据感知融合模块检测得到减速带轮廓的坐标信息;根据减速带轮廓坐标信息和四个轮胎中心坐标计算得到最小距离,判断最小距离小于设定阈值时,对车辆进行纵向控制量的补偿;提供一种简单、平稳、舒适过减速带的泊车控制方法。
技术研发人员:张龙,李刚
受保护的技术使用者:武汉光庭信息技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!