充电桩、充电桩系统、回桩方法、装置及割草机器人与流程
本申请实施例涉及园艺设备,尤其涉及一种充电桩、充电桩系统、回桩方法、装置及割草机器人。
背景技术:
1、割草机器人能够实现自动对草坪等进行修剪,从而减少对人工的时间占用。割草机器人可按照输入指令在无人操作的情况下完成回桩充电的行为,以此减轻了用户负担,节约了时间。
2、现有的割草机器人回桩技术,大多基于gps定位、引导线引导、虚拟边界巡边等方式。例如,在室内使用场景中,割草机器人通常使用红外线、超声波的感应回桩技术或基于建图中虚拟边界引导方式回桩。这种红外线、超声波的回桩方式误触几率较大,受环境噪声影响严重。
3、在室外使用场景中,割草机器人则多基于gps定位和桩前电磁引导线辅助引导完成精准回桩。这种基于gps定位的回桩方式不但对信号强弱与信号精度有较高要求,同时需要在充电桩的底板布置辅助电磁引导线,也有一定的材料成本与运输成本。
4、综上现有的割草机器人自动回桩的成本较高、难度较大,稳定性不足。
技术实现思路
1、为了解决上述问题,本申请实施例提供了一种充电桩、充电桩系统、回桩方法、装置及割草机器人,以至少部分地解决上述问题。
2、本发明的一个或者多个实施例提供一种充电桩,充电桩上预设有多个特征标识,多个特征标识中至少两个特征标识的分布面与剩余的特征标识的分布面不同,特征标识用于割草机器人进行图像识别以使割草机器人能够与充电桩对接充电。
3、根据本申请的另一方面,提供一种充电桩,充电桩上设置有标识部件,标识部件用于指示充电桩的位置,以使割草机器人能够与充电桩对接充电。
4、根据本申请的另一方面,提供一种充电桩系统,包括如上述任一方面的充电桩和标识装置,标识装置上设置第四标识部件,第四标识部件用于辅助确定充电桩的位置。
5、根据本申请的另一方面,提供一种回桩方法,所述方法用于引导割草机器人回到充电桩,所述割草机器人上配置有图像采集装置,所述充电桩上分布有特征标识,所述方法包括:获取所述割草机器人的图像采集装置在所述充电桩的桩前区域内采集的可用图像帧,所述图像帧中识别出的特征标识的数量大于或等于n,所述n为取值大于或等于3的正整数;根据识别出的所述特征标识在所述图像帧中的二维坐标、所述特征标识在世界坐标系内的三维坐标、以及所述图像采集装置的成像参数,确定所述割草机器人相对所述充电桩的相对位姿;根据所述相对位姿,驱动所述割草机器人回到所述充电桩。
6、根据本申请的另一方面,提供一种回桩装置,所述装置用于引导割草机器人回到充电桩,所述割草机器人上配置有图像采集装置,所述充电桩上分布有特征标识,所述装置包括:获取模块,用于获取所述割草机器人的图像采集装置在所述充电桩的桩前区域内采集的可用图像帧,所述图像帧中识别出的特征标识的数量大于或等于n,所述n为取值大于或等于3的正整数;确定模块,用于根据识别出的所述特征标识在所述图像帧中的二维坐标、所述特征标识在世界坐标系内的三维坐标、以及所述图像采集装置的成像参数,确定所述割草机器人相对所述充电桩的相对位姿;驱动模块,用于根据所述相对位姿,驱动所述割草机器人回到所述充电桩。
7、根据本申请的另一方面,提供一种割草机器人,割草机器人上配置有图像采集装置,割草机器人包括控制器,所述控制器用于执行上述的方法。
8、根据本申请的另一方面,提供一种计算机存储介质,其中,所述计算机存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
9、通过该方法利用图像采集装置在桩前区域内采集的可用图像帧识别出特征标识的二维坐标,继而结合特征标识在世界坐标系内的三维坐标、以及所述图像采集装置的成像参数可以准确地确定出割草机器人和充电桩之间的相对位姿,进而根据相对位姿引导割草机器人准确地回桩,这样利用特征标识进行定位保证了定位准确性,而且视觉成像不会受到环境中的其他电磁波和信号的噪声干扰,保证了准确性和可靠性,更不需要额外铺设引导线,同时克服了gps定位误差的缺陷,充分保证了回桩准确性。
10、另外,本申请实施例中只需在充电桩上设置标识部件,割草机可以通过本身的图像识别获取标识部件中分布的特征标识的位姿信息,从而可以确定充电桩与割草机之间的相对位姿信息,以进行路径规划,使得割草机实现回桩充电。成本低,且由于只需在充电桩上设置特征标识,结构简单,便于安装拆卸。
技术特征:
1.一种充电桩,其特征在于,所述充电桩(10)上设置有标识部件(2),所述标识部件(2)用于指示所述充电桩(10)的位置,以使割草机器人能够与所述充电桩(10)对接充电。
2.根据权利要求1所述的充电桩,其特征在于,所述充电桩(10)包括充电结构(3),所述标识部件(2)设置在所述充电结构(3)上。
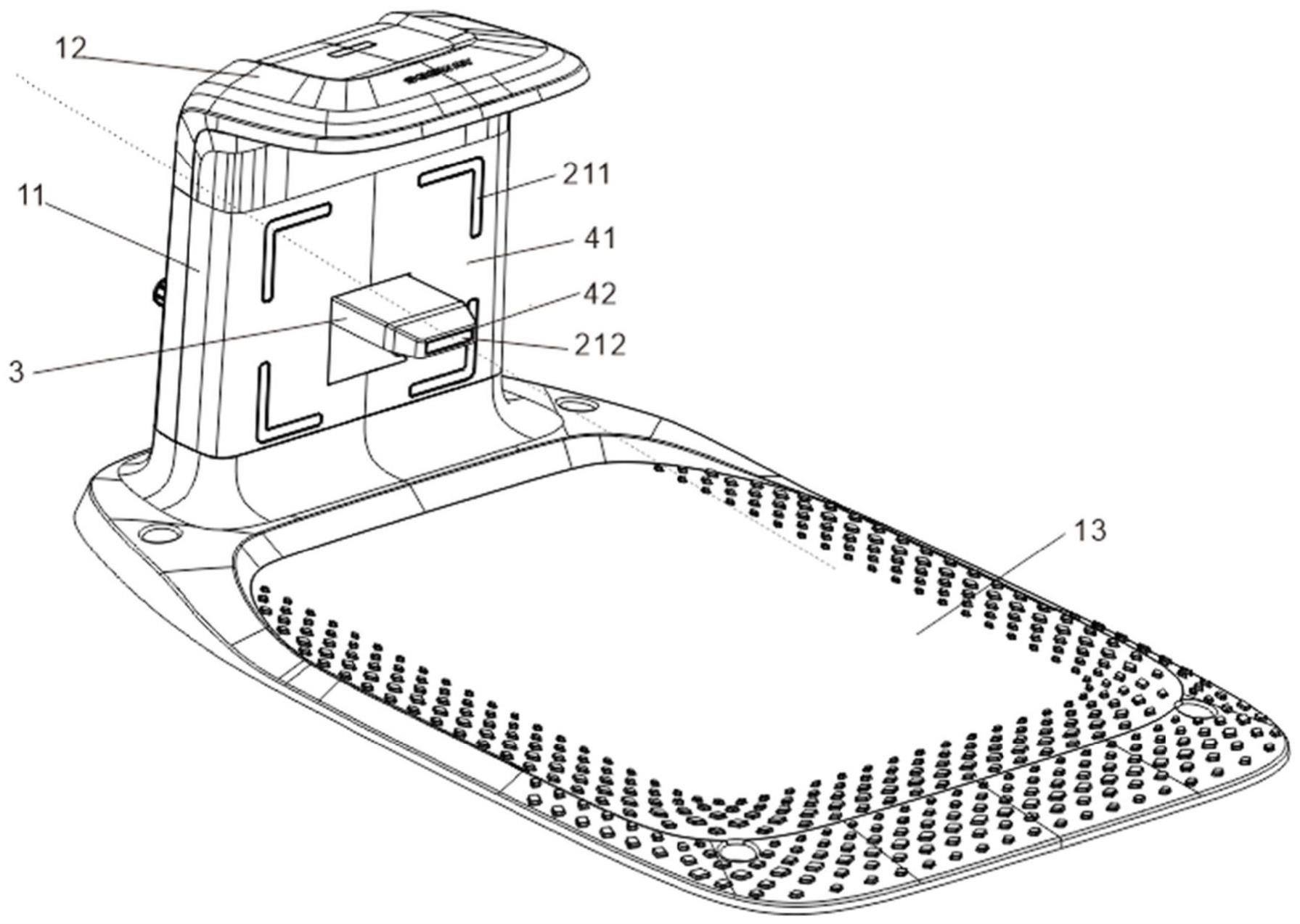
3.根据权利要求1所述的充电桩,其特征在于,所述标识部件(2)包括第一标识部件(211)和第二标识部件(212),所述第一标识部件(211)和所述第二标识部件(212)在所述充电桩(10)上的分布面不同。
4.根据权利要求3所述的充电桩,其特征在于,所述充电桩(10)包括充电桩体(11)和充电结构(3),所述充电桩体(11)的第一侧面设置所述第一标识部件(211)和所述充电结构(3)。
5.根据权利要求4所述的充电桩,其特征在于,所述充电结构(3)上设置所述第二标识部件(212)。
6.根据权利要求5所述的充电桩,其特征在于,所述充电结构(3)悬空的一端设置所述第二标识部件(212),且所述第二标识部件(212)设置在前端面。
7.根据权利要求4所述的充电桩,其特征在于,所述标识部件(2)还包括第三标识部件(213),所述充电桩体(11)的第二侧面设置所述第三标识部件(213),所述第二侧面与所述第一侧面相接。
8.根据权利要求4所述的充电桩,其特征在于,所述第一标识部件(211)为多个,多个所述第一标识部件(211)分布在所述充电结构(3)的周围。
9.根据权利要求8所述的充电桩,其特征在于,多个所述第一标识部件(211)呈非中心对称分布。
10.根据权利要求9所述的充电桩,其特征在于,所述第一标识部件(211)包括互相垂直且相交的两个条状结构。
11.根据权利要求3所述的充电桩,其特征在于,所述第一标识部件(211)位于所述充电桩(10)的第一分布面(41),所述第二标识部件(212)位于所述充电桩(10)的第二分布面(42),所述第一分布面(41)的法线与所述第二分布面(42)的法线之间形成夹角,且所述夹角的角度不等于0;或,
12.根据权利要求1所述的充电桩,其特征在于,所述标识部件(2)投影于所述标识部件(2)所在的所述充电桩体(11)的表面形成标识图案,所述标识图案中的最小内径大于或等于第一预设阈值,所述第一预设阈值为3厘米。
13.根据权利要求3或12所述的充电桩,其特征在于,位于所述充电桩体(11)上的同一分布面的所述标识部件(2)之间的最小间距大于或等于第二预设阈值,所述第二预设阈值为3厘米。
14.根据权利要求1所述的充电桩,其特征在于,所述标识部件(2)为反光组件或发光组件。
15.根据权利要求14所述的充电桩,其特征在于,所述反光组件包括反光件(22)和安装板(23),所述反光件(22)包括透光部(221)和反光部(222),所述反光部(222)由多个正立方体组成,所述反光件(22)的所述反光部(222)与所述安装板(23)固定连接,所述反光组件连接在所述充电桩体(11)的一侧。
16.一种充电桩系统,其特征在于,包括如权利要求1-15中任一所述的充电桩(10)和标识装置(50),所述标识装置(50)上设置第四标识部件(214),所述第四标识部件(214)用于辅助确定所述充电桩(10)的位置。
17.根据权利要求16所述的充电桩,其特征在于,所述标识装置(50)为定位信号接收装置。
18.一种充电桩,其特征在于,包括:
19.根据权利要求18所述的充电桩,其特征在于,所述充电桩(10)的表面设置标识部件(2),所述标识部件包括第一标识部件(211)和第二标识部件(212),所述第一标识部件(211)与所述第二标识部件(212)在所述充电桩(10)上的分布面不同,所述标识部件(2)上分布至少两个所述特征标识(20)。
20.一种回桩方法,其特征在于,所述方法用于引导割草机器人回到充电桩,所述割草机器人上配置有图像采集装置,所述充电桩上分布有特征标识,所述方法包括:
21.根据权利要求20所述的方法,其特征在于,所述桩前区域包括与所述充电桩对应的扇形区域,所述扇形区域位于所述充电桩的前方,且所述扇形区域的半径的取值大于0且小于m,所述m为正整数。
22.根据权利要求20或21所述的方法,其特征在于,所述获取所述割草机器人的图像采集装置在所述充电桩的桩前区域内采集的可用图像帧,包括:
23.根据权利要求22所述的方法,其特征在于,所述获取所述割草机器人的图像采集装置在所述充电桩的桩前区域内采集的可用图像帧,还包括:
24.根据权利要求23所述的方法,其特征在于,所述调整所述割草机器人的位置和姿态中的至少之一,包括:
25.根据权利要求22所述的方法,其特征在于,所述获取所述割草机器人的图像采集装置在所述充电桩的桩前区域内采集的可用图像帧,还包括:
26.根据权利要求20所述的方法,其特征在于,所述充电桩上设置有q个特征标识,所述q大于或等于2,且为正整数,针对所述世界坐标系的各坐标轴,所述q个特征标识在各所述坐标轴上的投影的最大距离大于或等于距离阈值。
27.根据权利要求26所述的方法,其特征在于,所述q个特征标识中的至少两个所述特征标识的分布平面与剩余的所述特征标识的分布平面不同。
28.根据权利要求20所述的方法,其特征在于,所述图像采集装置采集所述图像帧时,在环境光的光强固定时,所述图像帧的曝光时间与相对距离正相关,所述相对距离为所述割草机器人和所述充电桩之间的距离。
29.一种回桩装置,其特征在于,所述装置用于引导割草机器人回到充电桩,所述割草机器人上配置有图像采集装置,所述充电桩上分布有特征标识,所述装置包括:
30.一种割草机器人,所述割草机器人上配置有图像采集装置,其特征在于,所述割草机器人包括控制器,所述控制器用于执行权利要求20-28中任一项所述的方法。
技术总结
本发明提供一种充电桩、充电桩系统、回桩方法、装置及割草机器人,本申请实施例中只需在充电桩上设置特征标识,割草机可以通过本身的图像识别获取特征标识的位姿信息,从而可以确定充电桩与割草机之间的相对位姿信息,以进行路径规划,使得割草机实现回桩充电。成本低,且由于只需在充电桩上设置特征标识,结构简单,便于安装拆卸。另外,本申请回桩方法利用充电桩上的特征标识进行定位可以保证定位准确性,而且视觉成像不会受到环境中的其他电磁波和信号的噪声干扰,保证了准确性和可靠性,更不需要额外铺设引导线,同时克服了GPS定位误差的缺陷,充分保证了回桩准确性。
技术研发人员:周凯,颜旭,乔万阳,俞天宁
受保护的技术使用者:未岚大陆(北京)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!