基于卡尔曼滤波的车辆纵向阻力获取方法、装置及车辆与流程
本发明涉及自动驾驶,具体提供一种基于卡尔曼滤波的车辆纵向阻力获取方法、装置、介质及车辆。
背景技术:
1、高级辅助驾驶功能越来越受到大家的关注,而且其使用的场景也随着传感器和信息技术的进步而不断增加,其功能体验也在不断提升。随着辅助驾驶覆盖场景的拓展,在低速纵向控制上,会遇到越来越多的纵向扰动,例如减速带、路面坑洼、换电站v槽、台阶车位等。对这些纵向扰动带来的整车纵向阻力进行精确估计,将直接影响到辅助驾驶系统的控制效果。
2、相应地,本领域需要一种新的自动驾驶车辆的整车纵向阻力获取方案来解决上述问题。
技术实现思路
1、为了克服上述缺陷,提出了本发明,以提供解决或至少部分地解决如何对自动驾驶车辆的整车纵向阻力进行精确估计的问题。
2、在第一方面,本发明提供一种基于卡尔曼滤波的车辆纵向阻力获取方法,所述方法包括:
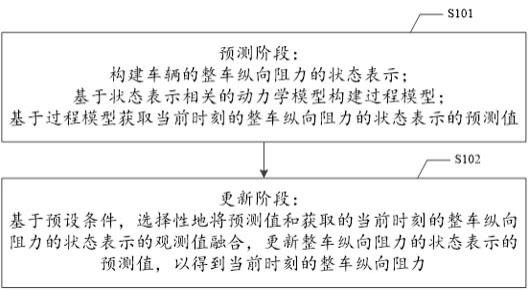
3、预测阶段:
4、构建车辆整车纵向阻力的状态表示;
5、基于所述状态表示相关的动力学模型构建过程模型;
6、基于所述过程模型获取当前时刻的整车纵向阻力的状态表示的预测值;
7、更新阶段:
8、基于预设条件,选择性地将所述预测值和获取的当前时刻的整车纵向阻力的状态表示的观测值融合,更新所述整车纵向阻力的状态表示的预测值,以得到当前时刻的整车纵向阻力。
9、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述状态表示包括整车纵向阻力和质心纵向速度;
10、所述动力学模型为车辆纵向动力学模型。
11、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述状态表示还包括主减速器的输出轴转速和轮胎纵向力;
12、所述动力学模型还包括电轴纵向动力学模型。
13、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述过程模型中的控制变量为车辆的主减速器的输出轴转矩。
14、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述观测值包括主减速器的输出轴转速和质心纵向速度。
15、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述方法还包括:
16、分别获取所述输出轴转矩、所述输出轴转速和所述质心纵向速度的变化梯度;
17、将所述输出轴转矩、所述输出轴转速和所述质心纵向速度的变化梯度分别与对应的梯度阈值进行比较;
18、当所述输出轴转矩、所述输出轴转速和所述质心纵向速度的变化梯度均大于对应的梯度阈值时,将获取的当前时刻的整车纵向阻力的状态表示的观测值以较低的滤波截至频率进行低通滤波处理,以降低所述更新的速度,否则以较高的滤波截至频率进行低通滤波处理,以提高所述更新的速度。
19、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述基于预设条件,选择性地将所述预测值和获取的当前时刻的整车纵向阻力的状态表示的观测值融合,更新所述整车纵向阻力的状态表示的预测值,以得到当前时刻的整车纵向阻力,包括:
20、判断所述车辆的机械制动是否介入;
21、若是,使用上一时刻更新后的预测值作为当前时刻更新后的预测值,以得到当前时刻的整车纵向阻力;和/或
22、若否,使用融合后的结果更新所述整车纵向阻力的状态表示的预测值,以得到当前时刻的整车纵向阻力。
23、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述机械制动介入的判断条件为:
24、所述车辆的制动踏板开度大于预设开度;或,
25、所述车辆的制动压力大于预设压力值;或,
26、所述车辆的底盘制动系统自动介入。
27、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述方法还包括:
28、获取所述机械制动介入后的制动距离;
29、当所述制动距离大于预设距离时,将所述当前时刻更新后的预测值清零。
30、在上述基于卡尔曼滤波的车辆纵向阻力获取方法的一个技术方案中,所述获取的当前时刻的整车纵向阻力的状态表示的观测值是通过对输入的整车纵向阻力状态表示的观测值进行低通滤波以使得所述观测值相位对齐后得到的。
31、在第二方面,提供一种控制装置,该控制装置包括至少一个处理器和至少一个存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述基于卡尔曼滤波的车辆纵向阻力获取方法的技术方案中任一项技术方案所述的基于卡尔曼滤波的车辆纵向阻力获取方法。
32、在第三方面,提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行上述基于卡尔曼滤波的车辆纵向阻力获取方法的技术方案中任一项技术方案所述的基于卡尔曼滤波的车辆纵向阻力获取方法。
33、在第四方面,提供一种车辆,所述车辆包括控制装置技术方案中的控制装置。
34、本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:
35、在实施本发明的技术方案中,本发明在预测阶段,构建车辆整车纵向阻力的状态表示,并根据状态表示相关的动力学模型构建过程模型,基于过程模型获取当前时刻的整车纵向阻力的状态表示的预测值;在更新阶段,根据预设条件,选择性地将预测值和当前时刻整车纵向阻力的状态表示的观测值进行融合,以更新整车纵向阻力的状态表示的预测值,从而获得当前时刻的整车纵向阻力。通过上述配置方式,本发明能够基于卡尔曼滤波对车辆当前时刻的整车纵向阻力进行准确估计,从而为辅助驾驶系统提供纵向动力学的重要参考信息,辅助自动驾驶的决策和控制过程。
技术特征:
1.一种基于卡尔曼滤波的车辆纵向阻力获取方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求2所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,
5.根据权利要求1所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1-6中任一项所述的方法,其特征在于,所述基于预设条件,选择性地将所述预测值和获取的当前时刻的整车纵向阻力的状态表示的观测值融合,更新所述整车纵向阻力的状态表示的预测值,以得到当前时刻的整车纵向阻力,包括:
8.根据权利要求7所述的方法,其特征在于,所述机械制动介入的判断条件为:
9.根据权利要求8所述的方法,其特征在于,所述方法还包括:
10.根据权利要求1所述的方法,其特征在于,
11.一种控制装置,包括至少一个处理器和至少一个存储装置,所述存储装置适于存储多条程序代码,其特征在于,所述程序代码适于由所述处理器加载并运行以执行权利要求1至10中任一项所述的方法。
12.一种计算机可读存储介质,其中存储有多条程序代码,其特征在于,所述程序代码适于由处理器加载并运行以执行权利要求1至10中任一项所述的方法。
13.一种车辆,其特征在于,所述车辆包括权利要求11所述的控制装置。
技术总结
本发明涉及自动驾驶技术领域,具体提供一种基于卡尔曼滤波的车辆纵向阻力获取方法、装置、介质及车辆,旨在解决如何对自动驾驶车辆的整车纵向阻力进行精确估计的问题。为此目的,本发明在预测阶段构建车辆整车纵向阻力的状态表示,根据状态表示相关的动力学模型构建过程模型,基于过程模型获取当前时刻的整车纵向阻力的状态表示的预测值;在更新阶段根据预设条件,选择性地将预测值和当前时刻整车纵向阻力的状态表示的观测值进行融合,更新整车纵向阻力的状态表示的预测值,获得当前时刻的整车纵向阻力,为辅助驾驶系统提供纵向动力学的重要参考信息,辅助自动驾驶的决策和控制过程。
技术研发人员:施雅风
受保护的技术使用者:安徽蔚来智驾科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!