一种可重构空地两栖机器人
本发明涉及机器人领域,特别涉及一种可重构的空地两栖机器人。
背景技术:
1、近年来无人机被广泛应用于军事侦察、地质勘探、物流配送、抢险救灾等任务,而在执行这些任务时,无人机的负载能力和续航能力直接决定了能否顺利完成任务。因此,如何同时提升无人机的续航能力和负载能力,成为一个亟待解决的问题。
2、无人机在空中飞行中需要克服其自身重力进行移动,因此其续航能力普遍较低,很难达到长时间持续飞行的目的,而两栖式陆空无人机的出现很好的解决了这一问。比起普通的无人机,当不需要无人机进行空中飞行时,它可以在地面上运动,因此极大的降低了能耗,提升了续航能力;而比起普通的无人车,它又具有良好的越障能力,且可以实现在三维空间内的运动。
3、因此,将将无人车与无人机结合起来,在四旋翼无人机下方安装无人机,使四旋翼无人机具备两栖运动能力。这种两栖式陆空机器人虽然提升了无人机的续航能力,但是由于增加了多余的机械结构以及电气装置,造成其自身重量增大,灵活性降低,控制难度增大,负载能力降低。
技术实现思路
1、为了解决上述问题,本发明提供一种可重构空地两栖机器人,该机器人由两架四旋翼无人机组成,可以实现空地两栖运动,相比于一般的两栖式陆空机器人,该机器人负载能力提升且控制较为灵活,且由于包含两架多旋翼无人机,其战场生存能力和侦察能力也大为提升。
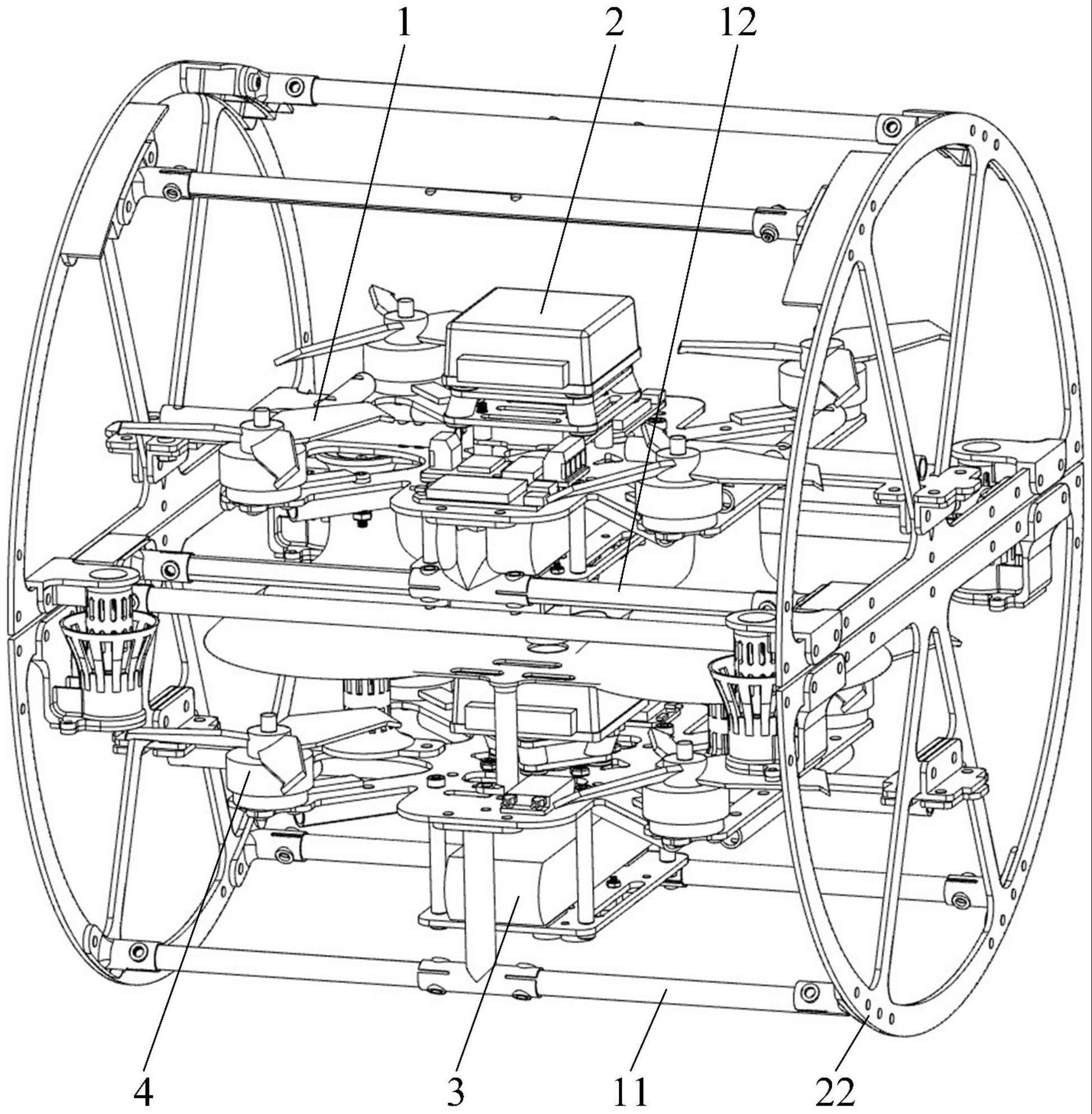
2、为了实现上述目的,本发明提供的技术方案是:一种可重构空地两栖机器人,包括:两个半圆柱状的外框,每个外框内安装有机架,机架上固定有一架无人机,两架无人机通过对接结构连接,当两架无人机对接在一起时,所述两个半圆柱状的外框组合为一个完整的圆柱,能够在地面滚动;所述对接结构包括导向模块和锁紧模块;其中所述导向模块包括固定在其中一个无人机上的第一导向槽和固定在另一个无人机上的第一导向杆,所述第一导向杆的中心轴线与所述第一导向槽的中心轴线在同一直线上,且所述第一导向槽的开口朝向所述第一导向杆;所述锁紧模块包括失电型电磁铁,所述失电型电磁铁固定在第二导向杆的一端,第二导向杆的另一端固定在其中一个无人机上,另外一架无人机上固定有第二导向槽,所述第二导向槽的底部固定有铁片,所述第二导向杆的中心轴线与所述第二导向槽的中心轴线在同一直线上,且所述第二导向槽的开口朝向所述第二导向杆。
3、作为优选的一种技术方案,所述机架上安装有减震器,所述减震器上安装有飞行控制器。
4、作为优选的一种技术方案,所述减震器包括两块镂空板,两块镂空板之间设置有多个橡胶空心减振球,两块镂空板分别与机架和减震器连接。
5、作为优选的一种技术方案,所述第一导向槽的形状为漏斗型,所述第一导向杆为空心柱状圆锥体。
6、作为优选的一种技术方案,所述机架与所述外框之间安装有用于加固的机架板加固杆。
7、作为优选的一种技术方案,所述外框的两侧半圆形边框之间连接有轮毂外沿加固杆。
8、作为优选的一种技术方案,所述轮毂外沿加固杆的中部设置有轮毂中部加固杆,所述轮毂中部加固杆的一端与所述轮毂外沿加固杆连接,另一端与所述机架连接。
9、作为优选的一种技术方案,所述轮毂外沿加固杆和所述轮毂中部加固杆由碳纤维材料制成。
10、作为优选的一种技术方案,当两架无人机对接时,其中一架无人机采用阶梯式下降策略逐步靠近另一架无人机完成快速自主对接。
11、作为优选的一种技术方案,所述的所述阶梯式下降策略具体为:当其中一架无人机到达另一架无人机上方并且摄像头能够拍摄到靶标后,在距离地面的不同水平高度处,设定不同边长的正方形区域,高度越高,正方形边长越大,且该正方形中心在竖直方向上投影点为靶标的中心点,当无人机处于该区域内时,以一定速度垂直下降,当离开该区域后,无人机保持悬停状态,利用无人机在水平方向上的波动继续降落,最终实现对接。
12、本发明相对于现有技术的有益效果是:
13、1.续航能力强。该机器人在执行军事侦察任务时,在达到目标区域前主要采用滚动运动的方式,降低能耗。在到达目标区域后,上方无人机机与下方无人机分离,可以升空进行侦察。
14、2. 应对复杂环境能力强。在一些封闭环境内,如建筑物内部、巷道、废墟、洞穴、楼道间等。无人机在其中飞行比较危险,可切换为滚动模式。在滚动模式时如需要跨越障碍,可以选择上方无人机与下方无人机分离分别飞过障碍物,也可以选择作为组合体飞过。
15、3. 侦察能力强。比起单个的两栖式陆空无人机,可重构陆空两栖机器人的上方无人机和下方无人机可以相互配合进行侦察。例如上方无人机高空飞行,负责大范围侦察,发现可疑目标。下方无人机低空飞行,逐步靠近可疑目标,获取可疑目标的具体信息。
16、4.战场生存能力强。由于具有两架四旋翼无人机,且两架无人机可实现实时信息交互,所以当其中一架被击落时,另一架无人机可以获得击落点的坐标,选择避开该区域继续进行侦察。
技术特征:
1.一种可重构空地两栖机器人,其特征在于,包括:两个半圆柱状的外框,每个外框内安装有机架,机架上固定有一架无人机,两架无人机通过对接结构连接,当两架无人机对接在一起时,所述两个半圆柱状的外框组合为一个完整的圆柱,能够在地面滚动;所述对接结构包括导向模块和锁紧模块;其中所述导向模块包括固定在其中一个无人机上的第一导向槽和固定在另一个无人机上的第一导向杆,所述第一导向杆的中心轴线与所述第一导向槽的中心轴线在同一直线上,且所述第一导向槽的开口朝向所述第一导向杆;
2.根据权利要求1所述的可重构空地两栖机器人,其特征在于,所述机架上安装有减震器,所述减震器上安装有飞行控制器。
3.根据权利要求3所述的可重构空地两栖机器人,其特征在于:所述减震器包括两块镂空板,两块镂空板之间设置有多个橡胶空心减振球,两块镂空板分别与机架和减震器连接。
4.根据权利要求1所述的可重构空地两栖机器人,其特征在于,所述第一导向槽的形状为漏斗型,所述第一导向杆为空心柱状圆锥体。
5.根据权利要求1所述的可重构空地两栖机器人,其特征在于,所述机架与所述外框之间安装有用于加固的机架板加固杆。
6.根据权利要求1所述的可重构空地两栖机器人,其特征在于,所述外框的两侧半圆形边框之间连接有轮毂外沿加固杆。
7.根据权利要求6所述的可重构空地两栖机器人,其特征在于,所述轮毂外沿加固杆的中部设置有轮毂中部加固杆,所述轮毂中部加固杆的一端与所述轮毂外沿加固杆连接,另一端与所述机架连接。
8.根据权利要求7所述的可重构空地两栖机器人,其特征在于,所述轮毂外沿加固杆和所述轮毂中部加固杆由碳纤维材料制成。
9.根据权利要求1所述的可重构空地两栖机器人,其特征在于,当两架无人机对接时,其中一架无人机采用阶梯式下降策略逐步靠近另一架无人机完成快速自主对接。
10.根据权利要求9可重构空地两栖机器人,其特征在于,所述的所述阶梯式下降策略具体为:当其中一架无人机到达另一架无人机上方并且摄像头能够拍摄到靶标后,在距离地面的不同水平高度处,设定不同边长的正方形区域,高度越高,正方形边长越大,且该正方形中心在竖直方向上投影点为靶标的中心点,当无人机处于该区域内时,以一定速度垂直下降,当离开该区域后,无人机保持悬停状态,利用无人机在水平方向上的波动继续降落,最终实现对接。
技术总结
本发明公开了一种可重构空地两栖机器人,该机器人由两架构型相似的四旋翼无人机组成,分别为上方无人机和下方无人机,两机可进行自主对接与分离,从而实现该机器人的拓扑重构。当两机组合成一个整体时,其整体外包络曲面为圆柱面,依靠旋翼推力即可实现地面滚动和空中飞行。该可重构空地两栖机器人结构紧凑,控制灵活,尺寸较小且重量较轻,相比于传统意义上的多旋翼无人机,由于在陆域运动时,螺旋桨提供的升力无需平衡无人机自身重力,因此其续航能力大大增强。除此之外,由于两架无人机可以协同执行任务,当其在执行军事侦察等任务时,侦察效率也大为提升。
技术研发人员:张子建,张冉昊,刘昕卓,张桐乐,王永滨,余城,董洋洋
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!