一种无人驾驶车辆的自动充电方法和系统与流程
本申请涉及新能源,特别是涉及一种无人驾驶车辆的自动充电方法和系统。
背景技术:
1、随着新能源电动汽车的普及,各式各样的电动汽车充电手段也进入了高速发展阶段,尤其是无人驾驶的电动汽车。
2、专利申请号为202211522699.9的专利公开了一种无人集卡的自动充电调度方法,具体公开了将电量小于等于10%-30%的车辆分到即刻充电队列中,将电量小于等于40%-60%且大于10%-30%的车辆分到机会充电队列中;对不同队列的车辆以电量从低到高的顺序进行排序,优先控制电量低的车辆进行充电,且即刻充电队列优先于机会充电队列。但是该公开的技术方案并没有考虑到车辆在实际工作中的订单处理问题,且该技术方案实质上只是将待充电车辆按剩余电量进行优先级排序充电,即其并没有考虑到如何高效利用无人驾驶车辆剩余电量。
3、目前针对相关技术中如何高效利用无人驾驶车辆剩余电量的问题,尚未提出有效的解决方案。
技术实现思路
1、本申请实施例提供了一种无人驾驶车辆的自动充电方法和系统,以至少解决相关技术中如何高效利用无人驾驶车辆剩余电量的问题。
2、第一方面,本申请实施例提供了一种无人驾驶车辆的自动充电方法,所述方法包括:
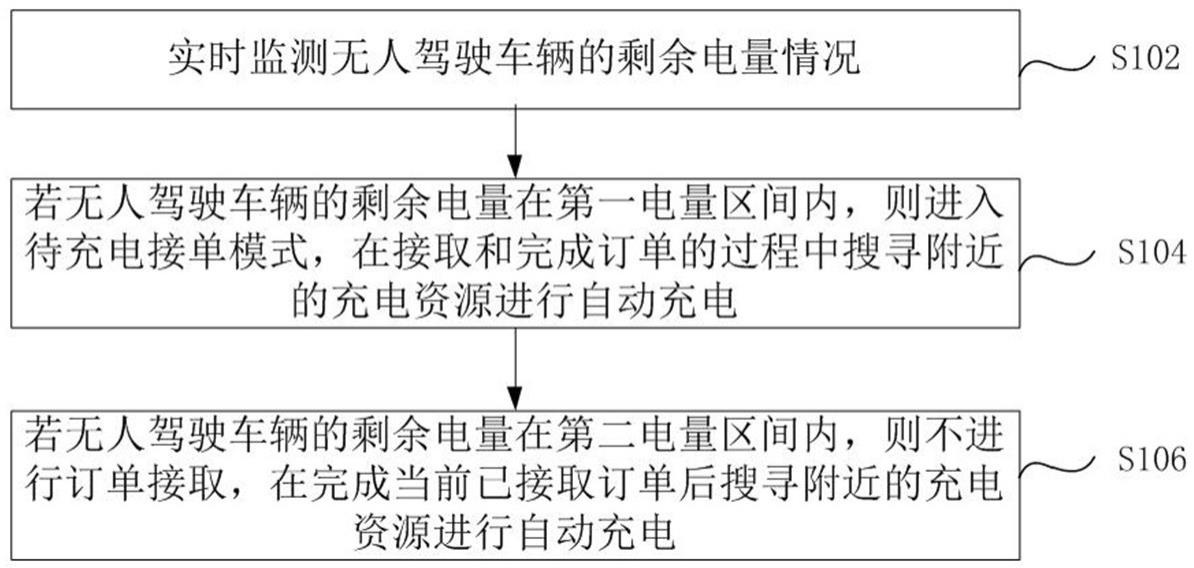
3、实时监测无人驾驶车辆的剩余电量情况;
4、若所述无人驾驶车辆的剩余电量在第一电量区间内,则进入待充电接单模式,在接取和完成订单的过程中搜寻附近的充电资源进行自动充电;
5、若所述无人驾驶车辆的剩余电量在第二电量区间内,则不进行订单接取,在完成当前已接取订单后搜寻附近的充电资源进行自动充电。
6、在其中一些实施例中,若所述无人驾驶车辆的剩余电量在第一电量区间内,则进入待充电接单模式,在接取和完成订单的过程中搜寻附近的充电资源进行自动充电包括:
7、第一电量区间包括第三电量区间和第四电量区间;
8、若所述无人驾驶车辆的剩余电量在第三电量区间内,则进入待充电接单模式,在所述待充电接单模式下接取和完成订单,并基于内置的离线地图搜寻附近的空闲充电桩进行自动充电;
9、若所述无人驾驶车辆的剩余电量在第四电量区间内,则进入待充电接单模式,在所述待充电接单模式下接取和完成订单,并向云端服务器发送电量预警请求,通过所述云端服务器搜寻附近的空闲充电桩进行自动充电。
10、在其中一些实施例中,若所述无人驾驶车辆的剩余电量在第二电量区间内,则不进行订单接取,在完成当前已接取订单后搜寻附近的充电资源进行自动充电包括:
11、第二电量区间包括第五电量区间和第六电量区间;
12、若所述无人驾驶车辆的剩余电量在第五电量区间内,则不进行订单接取,并向云端服务器发送电量预警请求,通过所述云端服务器搜寻附近的空闲充电桩,在完成当前已接取订单后通过搜寻到的空闲充电桩进行自动充电;
13、若所述无人驾驶车辆的剩余电量在第六电量区间内,则不进行订单接取,并将当前已接取订单进行外派和呼叫无人巡检车,通过所述无人巡检车进行自动充电。
14、在其中一些实施例中,所述无人驾驶车辆的接单方式包括线下接单和线上接单;
15、所述无人驾驶车辆具有正常接单模式和待充电接单模式,其中,所述正常接单模式为线下接单优先级和线上接单优先级相同的接单模式,所述待充电接单模式为线下接单优先级大于线上接单优先级的接单模式。
16、在其中一些实施例中,通过所述无人巡检车进行自动充电包括:
17、通过所述无人巡检车基于充电规则公式对所述无人驾驶车辆进行充电,其中,ntotal为当前划分区域内无人驾驶车辆的总数量,nin为当前划分区域内正在充电的无人驾驶车数量,ej为当前划分区域内第j辆无人驾驶车辆的电池容量,ei为当前划分区域内第i辆无人巡检车的充电效率,为当前划分区域内第i辆无人巡检车对第j辆无人驾驶车辆的充电时长。
18、在其中一些实施例中,呼叫无人巡检车包括:
19、通过所述无人驾驶车辆向云端服务器发送应急消息请求;
20、通过所述云端服务器对所述应急消息请求中的位置信息进行解析,得到所述无人驾驶车辆的停靠位置;
21、基于所述停靠位置,呼叫无人巡检车至所述无人驾驶车辆旁。
22、在其中一些实施例中,所述方法还包括:
23、通过对无人巡检车在巡检过程中车载摄像头获取的视频数据进行目标识别,标记出剩余电量为0的无人驾驶车辆,并反馈至云端服务器进行处理。
24、在其中一些实施例中,第一电量区间包括第三电量区间和第四电量区间,其中,所述第一电量区间为5%-40%电量的区间,所述第三电量区间为15%-40%电量的区间,所述第四电量区间为5%-15%电量的区间。
25、在其中一些实施例中,第二电量区间包括第五电量区间和第六电量区间,其中,所述第二电量区间为0%-5%电量的区间,所述第五电量区间为1%-5%电量的区间,所述第六电量区间为0%-1%电量的区间。
26、第二方面,本申请实施例提供了一种无人驾驶车辆的自动充电系统,所述系统包括电量监测模块和模式切换模块;
27、所述电量监测模块,用于实时监测无人驾驶车辆的剩余电量情况;
28、所述模式切换模块,用于若所述无人驾驶车辆的剩余电量在第一电量区间内,则进入待充电接单模式,在接取和完成订单的过程中搜寻附近的充电资源进行自动充电;
29、所述模式切换模块,用于若所述无人驾驶车辆的剩余电量在第二电量区间内,则不进行订单接取,在完成当前已接取订单后搜寻附近的充电资源进行自动充电。
30、相比于相关技术,本申请实施例提供的一种无人驾驶车辆的自动充电方法和系统,其中,该方法通过实时监测无人驾驶车辆的剩余电量情况;若所述无人驾驶车辆的剩余电量在第一电量区间内,则进入待充电接单模式,在接取和完成订单的过程中搜寻附近的充电资源进行自动充电;若所述无人驾驶车辆的剩余电量在第二电量区间内,则不进行订单接取,在完成当前已接取订单后搜寻附近的充电资源进行自动充电,解决了如何高效利用无人驾驶车辆剩余电量的问题,基于对无人驾驶车辆实际接单情况的考虑,在车辆待充电场景下设置对应的订单接取模式,实现了对无人驾驶车辆电量的高效使用,提高无人车辆网络的运营效率。
技术特征:
1.一种无人驾驶车辆的自动充电方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,若所述无人驾驶车辆的剩余电量在第一电量区间内,则进入待充电接单模式,在接取和完成订单的过程中搜寻附近的充电资源进行自动充电包括:
3.根据权利要求1所述的方法,其特征在于,若所述无人驾驶车辆的剩余电量在第二电量区间内,则不进行订单接取,在完成当前已接取订单后搜寻附近的充电资源进行自动充电包括:
4.根据权利要求1-3任意一项所述的方法,其特征在于,所述无人驾驶车辆的接单方式包括线下接单和线上接单;
5.根据权利要求3所述的方法,其特征在于,通过所述无人巡检车进行自动充电包括:
6.根据权利要求3所述的方法,其特征在于,呼叫无人巡检车包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.根据权利要求2所述的方法,其特征在于,第一电量区间包括第三电量区间和第四电量区间,其中,所述第一电量区间为5%-40%电量的区间,所述第三电量区间为15%-40%电量的区间,所述第四电量区间为5%-15%电量的区间。
9.根据权利要求3所述的方法,其特征在于,第二电量区间包括第五电量区间和第六电量区间,其中,所述第二电量区间为0%-5%电量的区间,所述第五电量区间为1%-5%电量的区间,所述第六电量区间为0%-1%电量的区间。
10.一种无人驾驶车辆的自动充电系统,其特征在于,所述系统包括电量监测模块和模式切换模块;
技术总结
本申请涉及一种无人驾驶车辆的自动充电方法和系统,其中,该方法包括:实时监测无人驾驶车辆的剩余电量情况;若所述无人驾驶车辆的剩余电量在第一电量区间内,则进入待充电接单模式,在接取和完成订单的过程中搜寻附近的充电资源进行自动充电;若所述无人驾驶车辆的剩余电量在第二电量区间内,则不进行订单接取,在完成当前已接取订单后搜寻附近的充电资源进行自动充电。通过本申请,解决了如何高效利用无人驾驶车辆剩余电量的问题,基于对无人驾驶车辆实际接单情况的考虑,在车辆待充电场景下设置对应的订单接取模式,实现了对无人驾驶车辆电量的高效使用,提高无人车辆网络的运营效率。
技术研发人员:肖赟
受保护的技术使用者:浙江云针信息科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!