一种颠簸路段的智能化显示控制系统的制作方法
本发明涉及一种控制系统,尤其涉及一种颠簸路段的智能化显示控制系统。
背景技术:
1、目前,随着车辆的拥有量越来越高,开车出行的几率越来越高,开车去到的地方也越来越多,需要经过各种路况。在开车过程中,有时经过的颠簸道路有比较多的坑洼、减速带、或者是开车经过崎岖不平的山路。在这些道路上驾驶是比较困难的,驾驶员需要集中精力控制车辆,因此需要在车辆经过颠簸路段时,给驾驶员尽量多的提醒。
2、目前,检测到颠簸路段主要有下面几种提醒方案:
3、1.通过广播接收道路信息,当接收到前方道路颠簸时,通过广播或者语音播报形式提醒驾驶员注意前方道路颠簸,或者前方道路有比较大的坑洼等道路情况,提醒驾驶员注意行车安全。
4、2.采用传感器检测道路颠簸情况,当检测到道路颠簸后,在组合仪表上用声光报警提醒驾驶员注意颠簸道路。
5、3.采用传感器检测道路颠簸情况,当检测到道路颠簸后,车上安装有独立的颠簸路段报警的警示灯,点亮警示灯进行报警。
6、上述几种颠簸路段的报警提醒方式,存在如下不足之处:
7、1.采用广播接收道路情况,用语音播报或者广播播报的方式进行提醒的体验不好。因为广播给出的前方道路颠簸处的距离不准确,车辆本身无法判断距离颠簸位置的准确距离,或者开车时已经避开了前方的颠簸路段,可是广播还是在播报,因此体验较差。
8、2.当传感器检测到道路颠簸后,通过在仪表上采用声光报警的方式进行提醒。这种方式的缺点在于提醒的方式不具体,一般只能提醒出道路颠簸、坑洼、有减速带、或井盖翘起等提前定义好的语句,但是无法给到驾驶员具体的详细信息,例如坑洼在哪个位置?具体有多大的坑?车辆轻微转向能否避让等信息,这对于驾驶员如何处理颠簸路段的正常行驶无法给到足够的帮助。
9、3.当检测到前方颠簸路段时,采用独立的警示灯方案的缺点在于需要单独加一个警示灯,这会影响整车车内的美观性,并且警示灯平时用的也会比较少,当颠簸路段点亮警示灯,很容易让驾驶员觉得车辆出了什么问题,容易影响驾驶员的注意力,给驾驶员带来不好的体验。
技术实现思路
1、本发明针对现有技术的弊端,提供一种颠簸路段的智能化显示控制系统。
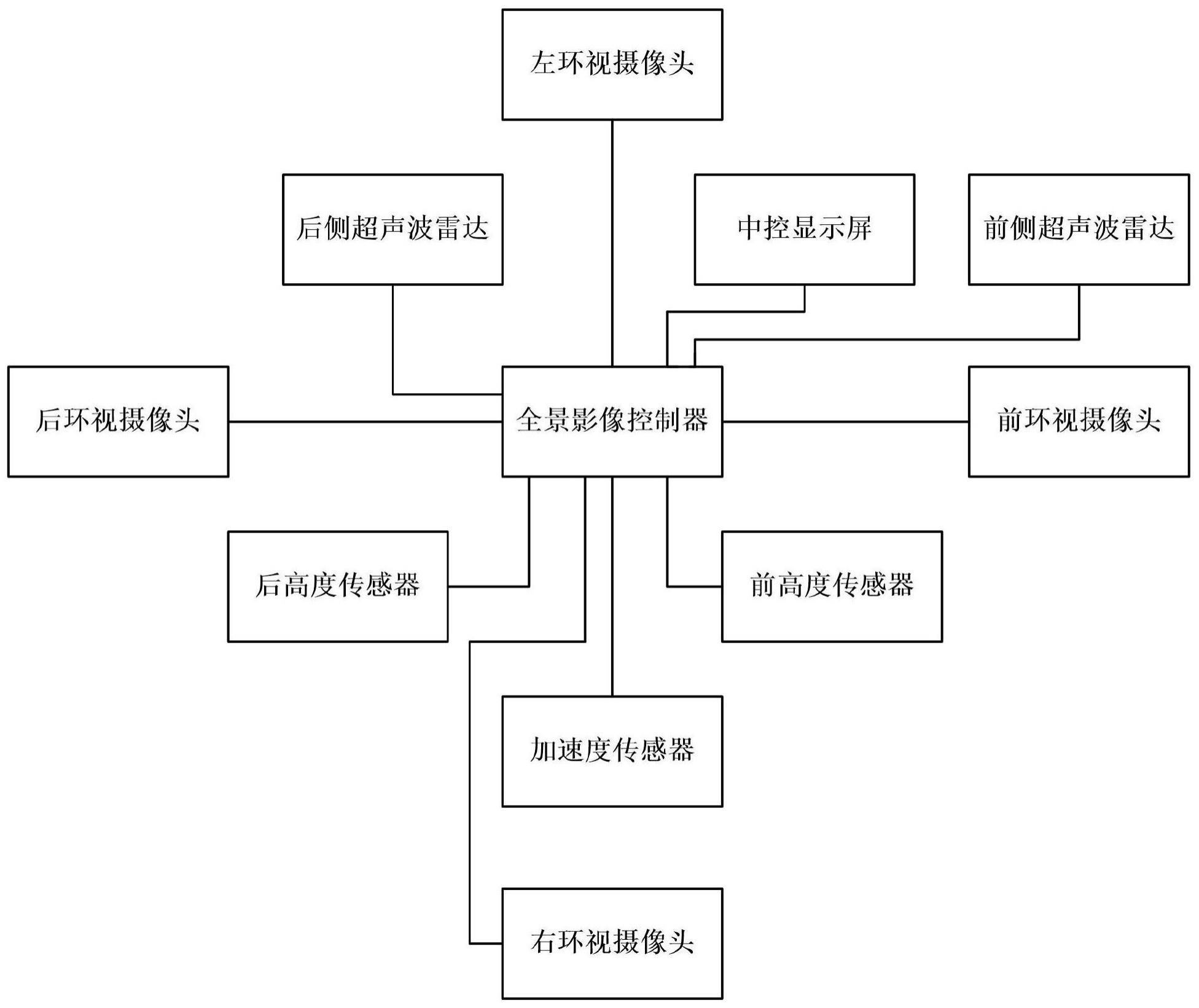
2、本发明所述的颠簸路段的智能化显示控制系统,包括全景影像控制器、中控显示屏、环视摄像头组件、和超声波雷达组件;
3、当车辆以预定的车速行驶于颠簸路段时,所述全景影像控制器根据所述环视摄像头组件和所述超声波雷达组件实时获取到的路况信息控制所述中控显示屏显示输出当前颠簸路段的图像信息。
4、本发明所述的颠簸路段的智能化显示控制系统中,还包括加速度传感器,所述加速度传感器的感测信号接入所述全景影像控制器;
5、所述全景影像控制器根据所述加速度传感器在车辆于预定的行驶距离内的感测信号数值超过设定阈值的次数确定车辆当前行驶于颠簸路段。
6、本发明所述的颠簸路段的智能化显示控制系统中,所述环视摄像头组件包括前环视摄像头、后环视摄像头、左环视摄像头、和右环视摄像头,且所述前环视摄像头、后环视摄像头、左环视摄像头、和右环视摄像头分别与所述全景影像控制器连接;
7、所述超声波雷达组件包括分别设置于车辆的前端和后端的前侧超声波雷达和后侧超声波雷达,且所述前侧超声波雷达和所述后侧超声波雷达分别与所述全景影像控制器连接;
8、所述全景影像控制器根据所述前环视摄像头、后环视摄像头、左环视摄像头、和右环视摄像头当前获取的道路图像信息,以及所述前侧超声波雷达和所述后侧超声波雷达当前获取的道路异常物信息识别生成当前颠簸路段的图像信息。
9、本发明所述的颠簸路段的智能化显示控制系统中,所述全景影像控制器根据所述前环视摄像头和所述前侧超声波雷达获取的道路异常物信息,对于高度超过预定阈值的道路异常物进行警示标识。
10、本发明所述的颠簸路段的智能化显示控制系统中,所述全景影像控制器控制所述中控显示屏于当前输出的颠簸路段的图像信息上以透明形式叠加显示车身模型和以半透明形式叠加显示车轮。
11、本发明所述的颠簸路段的智能化显示控制系统中,所述全景影像控制器根据车轮当前的运动轨迹信息确定车辆即将经过的颠簸路段,并对该即将经过的颠簸路段上的道路异常物进行警示标识。
12、本发明所述的颠簸路段的智能化显示控制系统中,所述全景影像控制器根据各道路异常物与当前车辆距离的不同进行相应的颜色警示标识和声音警示标识。
13、本发明所述的颠簸路段的智能化显示控制系统中,还包括分别设置于车辆前端和后端的前高度传感器和后高度传感器,且所述前高度传感器和所述后高度传感器分别与所述全景影像控制器连接;
14、所述全景影像控制器根据所述前高度传感器和所述后高度传感器的高度感测信息控制所述车身模型以对应的俯仰角度显示。
15、本发明所述的颠簸路段的智能化显示控制系统中,所述全景影像控制器根据外部指令控制所述中控显示屏改变所述车身模型显示时的z向高度,以显示车辆底盘与当前路面之间的预定区域。
16、本发明所述的颠簸路段的智能化显示控制系统中,所述中控显示屏被预先设定为自动开启显示输出当前颠簸路段的图像信息的功能;
17、当所述车辆以预定的车速行驶于所述颠簸路段时,所述全景影像控制器激活所述中控显示屏显示输出当前颠簸路段的图像信息。
18、本发明所述的颠簸路段的智能化显示控制系统中,通过全景影像控制器检测车辆行驶路段的颠簸情况,当检测到颠簸道路时,自动激活颠簸道路显示界面。在颠簸道路显示界面中,将车身模型设置为透明、四轮设置为半透明,以方便观察车辆底部的道路情况。并且,可根据前后高度传感器的数据实时调整透明车身模型的俯仰角度,方便驾驶员更加清楚地知道车辆的整个车体状态。驾驶员也可以设定调整透明车身模型的高度,方便驾驶员更清楚观测车身模型和道路表面的间隙。全景影像控制器识别到颠簸路段时,利用环视摄像头组件和超声波雷达组件检测道路上的坑洼、大的落石或者台阶的情况,当检测到影响车辆行驶的异常物时根据异常物距离的不同进行相应的报警,让驾驶员更加容易驾驶车辆。
技术特征:
1.一种颠簸路段的智能化显示控制系统,其特征在于,包括全景影像控制器、中控显示屏、环视摄像头组件、和超声波雷达组件;
2.如权利要求1所述的颠簸路段的智能化显示控制系统,其特征在于,还包括加速度传感器,所述加速度传感器的感测信号接入所述全景影像控制器;
3.如权利要求1所述的颠簸路段的智能化显示控制系统,其特征在于,所述环视摄像头组件包括前环视摄像头、后环视摄像头、左环视摄像头、和右环视摄像头,且所述前环视摄像头、后环视摄像头、左环视摄像头、和右环视摄像头分别与所述全景影像控制器连接;
4.如权利要求3所述的颠簸路段的智能化显示控制系统,其特征在于,所述全景影像控制器根据所述前环视摄像头和所述前侧超声波雷达获取的道路异常物信息,对于高度超过预定阈值的道路异常物进行警示标识。
5.如权利要求3所述的颠簸路段的智能化显示控制系统,其特征在于,所述全景影像控制器控制所述中控显示屏于当前输出的颠簸路段的图像信息上以透明形式叠加显示车身模型和以半透明形式叠加显示车轮。
6.如权利要求5所述的颠簸路段的智能化显示控制系统,其特征在于,所述全景影像控制器根据车轮当前的运动轨迹信息确定车辆即将经过的颠簸路段,并对该即将经过的颠簸路段上的道路异常物进行警示标识。
7.如权利要求5所述的颠簸路段的智能化显示控制系统,其特征在于,所述全景影像控制器根据各道路异常物与当前车辆距离的不同进行相应的颜色警示标识和声音警示标识。
8.如权利要求5所述的颠簸路段的智能化显示控制系统,其特征在于,还包括分别设置于车辆前端和后端的前高度传感器和后高度传感器,且所述前高度传感器和所述后高度传感器分别与所述全景影像控制器连接;
9.如权利要求8所述的颠簸路段的智能化显示控制系统,其特征在于,所述全景影像控制器根据外部指令控制所述中控显示屏改变所述车身模型显示时的z向高度,以显示车辆底盘与当前路面之间的预定区域。
10.如权利要求1所述的颠簸路段的智能化显示控制系统,其特征在于,所述中控显示屏被预先设定为自动开启显示输出当前颠簸路段的图像信息的功能;
技术总结
本发明公开了一种颠簸路段的智能化显示控制系统,包括全景影像控制器、中控显示屏、环视摄像头组件、和超声波雷达组件;当车辆以预定的车速行驶于颠簸路段时,所述全景影像控制器根据所述环视摄像头组件和所述超声波雷达组件实时获取到的路况信息控制所述中控显示屏显示输出当前颠簸路段的图像信息。本发明通过全景影像控制器检测车辆行驶路段的颠簸情况,当检测到颠簸道路时,自动激活颠簸道路显示界面,并利用环视摄像头组件和超声波雷达组件检测道路上的坑洼、大的落石或者台阶的情况,当检测到影响车辆行驶的异常物时根据异常物距离的不同进行相应的报警,让驾驶员更加容易驾驶车辆。
技术研发人员:陈祖辉
受保护的技术使用者:阿尔特汽车技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!