保持安全车距的驾驶控制方法、设备及介质与流程
本申请涉及汽车,具体涉及一种保持安全车距的驾驶控制方法、设备及介质。
背景技术:
1、在高速行车的过程中,由于自车或者他车的驾驶员注意力不够集中,或者激进驾驶,容易造成自车和前车的车距或者自车和后车的车距过近,一旦有突发事件的发生,驾驶员来不及刹车,就会造成车辆的连环追尾和财产损失,甚至危害自车和他车的驾乘人员生命安全。
2、现有技术中,一般使用智能驾驶辅助自适应巡航功能,但是,该功能只能保持和前车的车距、或者对前车进行自动跟车等,无法保证和后方车辆的安全车距,安全性低。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本申请旨在提供一种保持安全车距的驾驶控制方法、设备及介质,解决现有技术中无法保证和后方车辆的安全车距的问题,提高了车辆的行驶安全性。
2、本申请实施例提供一种保持安全车距的驾驶控制方法,包括:
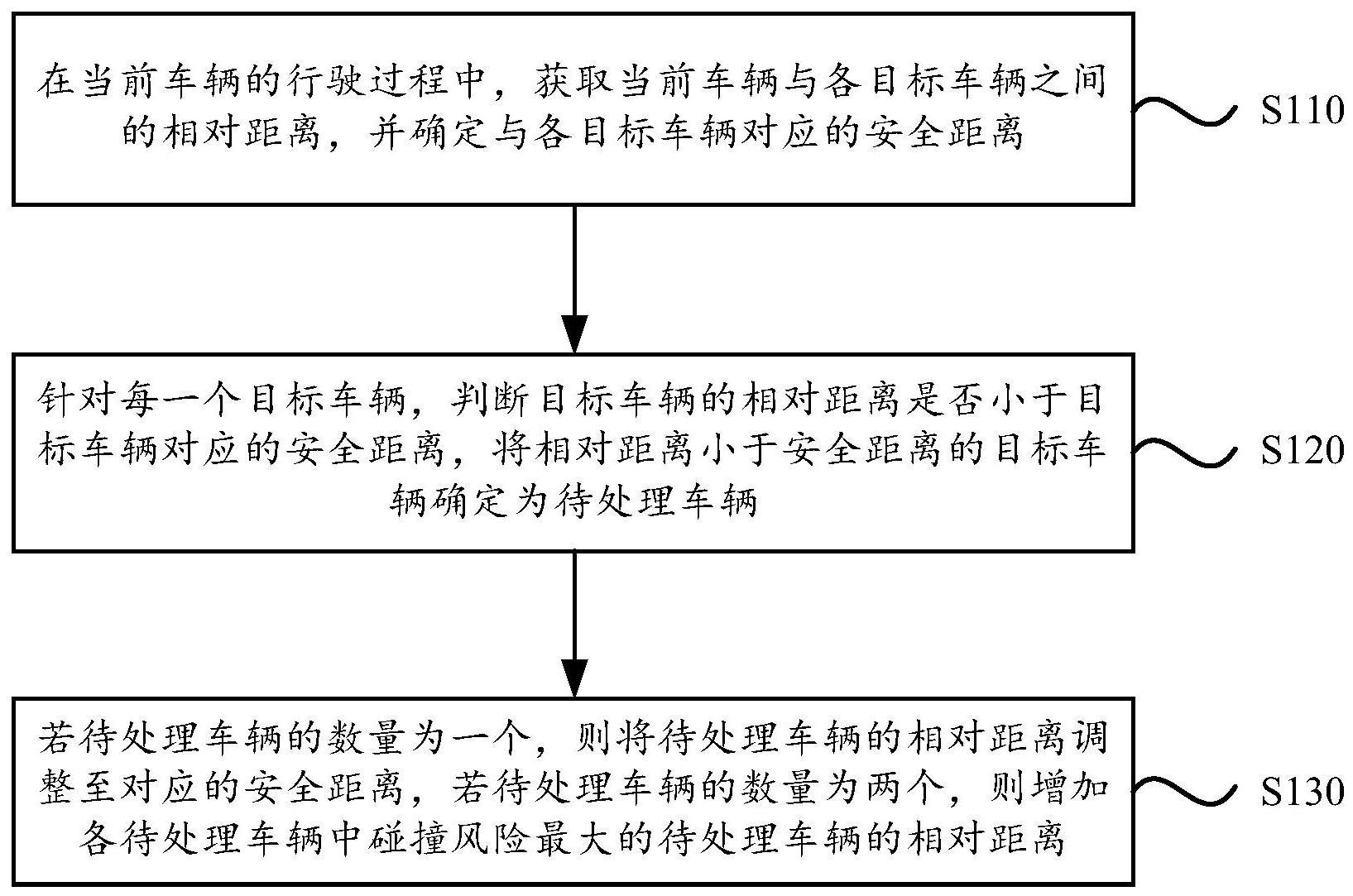
3、在当前车辆的行驶过程中,获取所述当前车辆与各目标车辆之间的相对距离,并确定与各所述目标车辆对应的安全距离;
4、针对每一个所述目标车辆,判断所述目标车辆的相对距离是否小于所述目标车辆对应的安全距离,将相对距离小于安全距离的目标车辆确定为待处理车辆;
5、若所述待处理车辆的数量为一个,则将所述待处理车辆的相对距离调整至对应的安全距离,若所述待处理车辆的数量为两个,则增加各所述待处理车辆中碰撞风险最大的待处理车辆的相对距离。
6、可选的,所述确定与各所述目标车辆对应的安全距离,包括:
7、针对每一个所述目标车辆,在所述当前车辆和所述目标车辆中确定当前后方车辆,获取所述当前后方车辆的当前车速;
8、基于所述当前后方车辆的当前车速以及第一预设映射表,确定与所述目标车辆对应的安全距离;
9、其中,所述第一预设映射表用于描述各车速与各安全距离之间的对应关系。
10、可选的,所述确定与各所述目标车辆对应的安全距离,包括:
11、针对每一个所述目标车辆,在所述当前车辆和所述目标车辆中确定当前后方车辆,获取所述当前后方车辆的当前车速;
12、基于所述当前后方车辆的当前车速、所述当前后方车辆的当前车辆类型以及第二预设映射表,确定与所述目标车辆对应的安全距离;
13、其中,所述第二预设映射表用于描述各车速、各车辆类型以及各安全距离之间的对应关系。
14、可选的,各所述目标车辆包括前方目标车辆和后方目标车辆,将所述待处理车辆的相对距离调整至对应的安全距离,包括:
15、在所述待处理车辆为后方目标车辆的情况下,生成所述当前车辆对应的动力系统控制指令,以通过所述动力系统控制指令控制所述当前车辆加速,将所述后方目标车辆的相对距离调整至对应的安全距离;以及,
16、在所述待处理车辆为前方目标车辆的情况下,生成所述当前车辆对应的制动系统控制指令,以通过所述制动系统控制指令控制所述当前车辆减速,将所述前方目标车辆的相对距离调整至对应的安全距离。
17、可选的,所述增加各所述待处理车辆中碰撞风险最大的待处理车辆的相对距离,包括:
18、将各所述待处理车辆之间的中间位置确定为目标调整位置;
19、生成动力系统控制指令或制动系统控制指令,以将所述当前车辆调整至所述目标调整位置,增加碰撞风险最大的待处理车辆的相对距离。
20、可选的,所述增加各所述待处理车辆中碰撞风险最大的待处理车辆的相对距离,包括:
21、基于各所述待处理车辆对应的安全距离确定安全距离比值,根据所述安全距离比值以及各所述待处理车辆的相对距离,确定各所述待处理车辆的目标调整距离;
22、基于各所述待处理车辆的目标调整距离确定所述当前车辆的目标调整位置,生成动力系统控制指令或制动系统控制指令,以将所述当前车辆调整至所述目标调整位置,使得碰撞风险最大的待处理车辆的相对距离增加至目标调整距离。
23、可选的,在所述将相对距离小于安全距离的目标车辆确定为待处理车辆之后,所述方法还包括:
24、在所述待处理车辆的数量为一个的情况下,若检测到所述当前车辆的制动请求或油门请求,则基于所述制动请求或所述油门请求预测所述待处理车辆的相对距离是否减小,若是,则抑制对所述制动请求或所述油门请求的响应,直至在预设时间内再次检测到所述制动请求或所述油门请求;
25、在所述待处理车辆的数量为两个的情况下,若检测到所述当前车辆的制动请求或油门请求,则基于所述制动请求或所述油门请求预测碰撞风险最大的待处理车辆的相对距离是否减小,若是,则抑制对所述制动请求或所述油门请求的响应,直至在预设时间内再次检测到所述制动请求或所述油门请求。
26、可选的,在所述将相对距离小于安全距离的目标车辆确定为待处理车辆之后,所述方法还包括:
27、基于所述待处理车辆相对于所述当前车辆的位置方向,生成展示设备控制指令,以通过所述展示设备控制指令,控制所述当前车辆中的所述位置方向的灯光展示设备的展示;和/或,
28、若所述待处理车辆的数量为两个,则生成多媒体设备控制指令,以通过所述多媒体设备控制指令,控制所述当前车辆中的多媒体设备展示变道提示信息。
29、本申请实施例还提供一种电子设备,所述电子设备包括:
30、处理器和存储器;
31、所述处理器通过调用所述存储器存储的程序或指令,用于执行本申请任一实施例提供的保持安全车距的驾驶控制方法的步骤。
32、本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行本申请任一实施例提提供的保持安全车距的驾驶控制方法的步骤。
33、综上所述,本申请提出一种保持安全车距的驾驶控制方法,在当前车辆行驶的过程中,获取当前车辆与各目标车辆之间的相对距离,并确定与各目标车辆对应的安全距离,进而针对每一个目标车辆,判断目标车辆的相对距离是否小于对应的安全距离,如果是,则将其确定为待处理车辆,在待处理车辆的数量为一个时,将待处理车辆的相对距离调整至安全距离,在待处理车辆的数量为两个时,增加碰撞风险最大的待处理车辆的相对距离,以实现在车辆行驶过程中与各方向的目标车辆之间的距离控制,解决现有技术中无法保证和后方车辆的安全车距的问题,提高了车辆的行驶安全性,并且,还可以在本车与前车、后车之间的相对距离均小于对应的安全距离时,调整其中碰撞风险更大的车辆与本车的相对距离,进一步提高了车辆的行驶安全性。
技术特征:
1.一种保持安全车距的驾驶控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定与各所述目标车辆对应的安全距离,包括:
3.根据权利要求1所述的方法,其特征在于,所述确定与各所述目标车辆对应的安全距离,包括:
4.根据权利要求1所述的方法,其特征在于,各所述目标车辆包括前方目标车辆和后方目标车辆,将所述待处理车辆的相对距离调整至对应的安全距离,包括:
5.根据权利要求4所述的方法,其特征在于,所述增加各所述待处理车辆中碰撞风险最大的待处理车辆的相对距离,包括:
6.根据权利要求4所述的方法,其特征在于,所述增加各所述待处理车辆中碰撞风险最大的待处理车辆的相对距离,包括:
7.根据权利要求1-6中任一所述的方法,其特征在于,在所述将相对距离小于安全距离的目标车辆确定为待处理车辆之后,所述方法还包括:
8.根据权利要求1-6中任一所述的方法,其特征在于,在所述将相对距离小于安全距离的目标车辆确定为待处理车辆之后,所述方法还包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1至8任一项所述的保持安全车距的驾驶控制的步骤。
技术总结
本申请提供一种保持安全车距的驾驶控制方法、设备及介质,该方法在当前车辆行驶的过程中,获取当前车辆与各目标车辆之间的相对距离,并确定与各目标车辆对应的安全距离,进而针对每一个目标车辆,判断目标车辆的相对距离是否小于对应的安全距离,如果是,则将其确定为待处理车辆,在待处理车辆的数量为一个时,将相对距离调整至安全距离,在待处理车辆的数量为两个时,增加碰撞风险最大的待处理车辆的相对距离,以实现与各方向的目标车辆之间的距离控制,解决现有技术中无法保证后方车辆安全车距的问题,并且,还可以在与前车、后车之间的相对距离均小于对应的安全距离时,调整其中碰撞风险更大的车辆的相对距离,进一步提高了车辆的行驶安全性。
技术研发人员:张祖豪,许林,郭宗环
受保护的技术使用者:重庆赛力斯新能源汽车设计院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!