一种车辆碰撞检测方法、装置、电子设备及存储介质与流程
本申请涉及车机指令管理领域,尤其涉及一种车辆碰撞检测方法、装置、电子设备及存储介质。
背景技术:
1、车辆无人驾驶技术的发展过程中,对于车辆的行驶探测,多采用超声传感、毫米波传感、摄像头、激光雷达等传感融合探测技术进行驾驶感知,在车辆行驶过程中,停车场景以及倒车场景等的驾驶感知中,需要对车辆与障碍物的碰撞状态做出传感数据分析,以及时检测碰撞的发生。
2、但在实际应用过程中,现有的技术主要应用的是加速度传感器或者压力传感器,传感器的感知能力无法检测到轻微的碰撞发生,且现有技术中的碰撞检测均集中体现传感器在碰撞发生时的警示反馈,而缺乏对碰撞的预测,导致传感数据碰撞的检测只能做到碰撞反馈的及时止损,而不能提供合理有效的避撞策略。
技术实现思路
1、本发明实施例的目的在于提供一种车辆碰撞检测方法、装置、电子设备及存储介质,以解决现有传感器无法检测到轻微的碰撞发生,以及不能提供合理有效的避撞策略的问题。
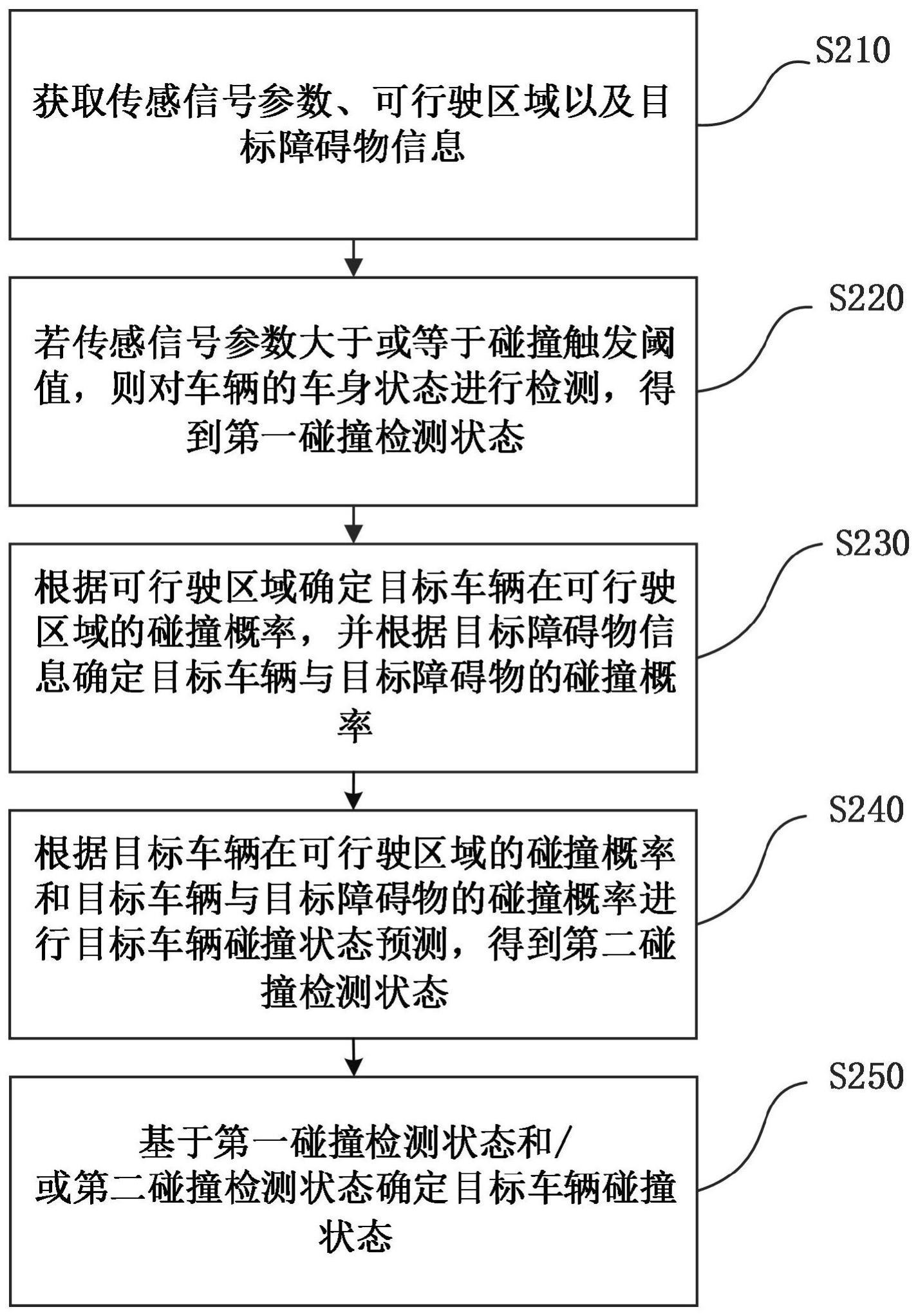
2、本发明提供了一种车辆碰撞检测方法,所述车辆碰撞检测方法包括:获取传感信号参数、可行驶区域以及目标障碍物信息,所述传感信号参数由多个设置在目标车辆的弹性波传感器获取;若所述传感信号参数大于或等于碰撞触发阈值,则对车辆的车身状态进行检测,得到第一碰撞检测状态;根据所述可行驶区域确定目标车辆在可行驶区域的碰撞概率,并根据所述目标障碍物信息确定目标车辆与目标障碍物的碰撞概率;根据所述目标车辆在可行驶区域的碰撞概率和目标车辆与目标障碍物的碰撞概率进行目标车辆碰撞状态预测,得到第二碰撞检测状态;基于所述第一碰撞检测状态和/或所述第二碰撞检测状态确定目标车辆碰撞状态。
3、于本发明的一实施例中,根据所述目标车辆在可行驶区域的碰撞概率和目标车辆与目标障碍物的碰撞概率进行目标车辆碰撞状态预测包括:根据预设权重信息对所述目标车辆在可行驶区域的碰撞概率和目标车辆与目标障碍物的碰撞概率进行目标碰撞置信度计算,得到目标碰撞置信度;若所述目标碰撞置信度小于目标碰撞置信阈值,则确定为第二初始碰撞状态,并触发碰撞确认模块对第二初始碰撞状态进行碰撞确认,得到确认后的第二初始碰撞状态;将确认后的第二初始碰撞状态确定为第二碰撞检测状态。
4、于本发明的一实施例中,对车辆的车身状态进行检测包括:获取车门信号跳变时长参数、鸣笛信号跳变时长参数、前舱盖开启状态以及后备箱开启状态;若所述车门信号跳变时长参数和鸣笛信号跳变时长参数均大于或等于预设信号跳变检测阈值,且前舱盖开启状态以及后备箱开启状态均为开启,则确定为第一初始碰撞状态,并触发碰撞确认模块对第一初始碰撞状态进行碰撞确认,得到确认后的第一初始碰撞状态;将确认后的第一初始碰撞状态确定为第一碰撞检测状态。
5、于本发明的一实施例中,确定为第一初始碰撞状态之后,所述车辆碰撞检测方法还包括:获取传感装置置信度;若所述传感装置置信度大于或等于预设传感置信阈值,则将所述第一初始碰撞状态确定为第一碰撞检测状态;若所述传感装置置信度小于预设传感置信阈值,则触发碰撞确认模块对第一初始碰撞状态进行碰撞确认。
6、于本发明的一实施例中,基于所述第一碰撞检测状态和/或所述第二碰撞检测状态确定目标车辆碰撞状态包括以下至少之一:若第一碰撞检测状态为碰撞,则将所述车辆碰撞状态确定为碰撞;
7、或
8、若存在多个连续周期检测的第二碰撞检测状态为碰撞,则将所述车辆碰撞状态确定为碰撞,所述连续周期检测为根据预设检测周期,对所述目标车辆在可行驶区域的碰撞概率和目标车辆与目标障碍物的碰撞概率进行周期性目标碰撞状态确定,以得到多个连续周期检测的第二碰撞检测状态。
9、于本发明的一实施例中,根据所述可行驶区域确定目标车辆在可行驶区域的碰撞概率包括:遍历目标车辆在可行驶区域的目标行驶点,确定各所述目标行驶点的碰撞风险状态,所述可行驶区域包括多个目标行驶点,所述目标行驶点的碰撞风险状态根据目标行驶点与目标车辆的距离和行驶状态进行确定,所述碰撞风险状态包括无风险和有风险;若存在碰撞风险状态为有风险的目标行驶点,根据碰撞风险状态为有风险的目标行驶点在全部所述目标行驶点的占比,确定目标车辆在可行驶区域的碰撞概率。
10、于本发明的一实施例中,根据所述目标障碍物信息确定目标车辆与目标障碍物的碰撞概率包括:获取目标车辆的速度、加速度;基于所述速度、加速度,以及目标障碍物信息中的目标障碍物距离信息和目标障碍物的移动速度信息确定目标车辆与目标障碍物的碰撞概率。
11、本发明实施例还提供了一种车辆碰撞检测装置,所述车辆碰撞检测装置包括:数据获取模块,用于获取多个传感信号参数、可行驶区域以及目标障碍物信息,所述传感信号参数由多个车端弹性波传感器获取;第一碰撞检测模块,用于若各所述传感信号参数大于或等于碰撞触发阈值,对预设车辆目标检测节点进行节点状态检测,得到第一碰撞检测状态;第二碰撞检测模块,用于根据所述可行驶区域确定目标车辆在可行驶区域的碰撞概率,并根据所述目标障碍物信息确定目标车辆与目标障碍物的碰撞概率;对所述目标车辆在可行驶区域的碰撞概率和目标车辆与目标障碍物的碰撞概率进行目标碰撞状态确定,得到第二碰撞检测状态;碰撞状态确定模块,用于基于所述第一碰撞检测状态和/或所述第二碰撞检测状态确定车辆碰撞状态。
12、本发明实施例还提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如上述实施例中任一项所述的车辆碰撞检测方法。
13、本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行如上述实施例中任一项所述的车辆碰撞检测方法。
14、本发明实施例中的车辆碰撞检测方法,通过获取传感信号参数、可行驶区域和目标障碍物信息,若传感信号参数大于或等于碰撞触发阈值,则对车辆的车身状态进行检测,得到第一碰撞检测状态,根据目标车辆在可行驶区域以及与目标障碍物的碰撞概率进行目标车辆碰撞状态预测,得到第二碰撞检测状态,基于第一碰撞检测状态和/或第二碰撞检测状态确定目标车辆碰撞状态;本方法利用弹性波传感数据对碰撞状态进行检测,可以基于轻微碰撞信号反馈,解决了现有传感器无法检测到轻微的碰撞发生,且基于目标车辆在可行驶区域以及与目标障碍物的碰撞概率进行目标车辆碰撞状态预测,并结合弹性波传感碰撞检测确定目标车辆碰撞状态,提供了有效的避撞策略。
15、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种车辆碰撞检测方法,其特征在于,所述车辆碰撞检测方法包括:
2.根据权利要求1所述的车辆碰撞检测方法,其特征在于,根据所述目标车辆在可行驶区域的碰撞概率和目标车辆与目标障碍物的碰撞概率进行目标车辆碰撞状态预测包括:
3.根据权利要求1所述的车辆碰撞检测方法,其特征在于,对车辆的车身状态进行检测包括:
4.根据权利要求3所述的车辆碰撞检测方法,其特征在于,确定为第一初始碰撞状态之后,所述车辆碰撞检测方法还包括:
5.根据权利要求1-4任一项所述的车辆碰撞检测方法,其特征在于,基于所述第一碰撞检测状态和/或所述第二碰撞检测状态确定目标车辆碰撞状态包括以下至少之一:
6.根据权利要求1-4任一项所述的车辆碰撞检测方法,其特征在于,根据所述可行驶区域确定目标车辆在可行驶区域的碰撞概率包括:
7.根据权利要求1-4任一项所述的车辆碰撞检测方法,其特征在于,根据所述目标障碍物信息确定目标车辆与目标障碍物的碰撞概率包括:
8.一种车辆碰撞检测装置,其特征在于,所述车辆碰撞检测装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行如权利要求1至7中任一项所述的车辆碰撞检测方法。
技术总结
本发明实施例中的车辆碰撞检测方法,通过获取传感信号参数、可行驶区域和目标障碍物信息,若传感信号参数大于或等于碰撞触发阈值,则对车辆的车身状态进行检测,得到第一碰撞检测状态,根据目标车辆在可行驶区域以及与目标障碍物的碰撞概率进行目标车辆碰撞状态预测,得到第二碰撞检测状态,基于第一碰撞检测状态和/或第二碰撞检测状态确定目标车辆碰撞状态;本方法利用弹性波传感数据对碰撞状态进行检测,可以基于轻微碰撞信号反馈,解决了现有传感器无法检测到轻微的碰撞发生,且基于目标车辆在可行驶区域以及与目标障碍物的碰撞概率进行目标车辆碰撞状态预测,并结合弹性波传感碰撞检测确定目标车辆碰撞状态,提供了有效的避撞策略。
技术研发人员:丁明慧,梁锋华,毛溶洁,盛涛
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!