一种导向式搬运车的力矩平衡控制方法与流程
本发明涉及有自动物料搬运车,具体涉及一种导向式搬运车力矩平衡系统及方法。
背景技术:
1、采用侧面或底部导向且行走轮直接在地面上行驶的导向式搬运车,车上安装的导向轮或导向辊等与地面安装的导向板或导向槽接触并受到导向板或导向槽的约束及反作用力,进而作用于车体提供导向式搬运车航向上的导向,使导向式搬运车沿导向板或导向槽行驶。
2、由于地面存在不平整或摩擦力不足,导向式搬运车在行驶中会出现行走轮打滑;或者货物重心与导向式搬运车重心偏移较大,各驱动轮负载不同,各驱动电机输出力矩差别较大等情况;一般搬运车只对车速进行控制,此时各个驱动轮输出的转矩只用于车速调节,各驱动轮提供车体的驱动力不同,造成对车体中心或质心的力矩不平衡,车体将向一侧偏斜,需要依靠导向板或导向槽对车体上安装的导向轮或导向辊的反作用力对车体中心或质心的力矩,予以平衡力矩,使搬运车被动纠偏继续沿导向板或导向槽行驶。在搬运车沿导向板或导向槽行驶时,由于无对应控制方法,上述过程反复发生,还会发生因偏载或地面或机械等原因造成搬运车始终向一侧偏斜或交替向两侧偏斜,出现搬运车行驶不平稳,导向轮或导向辊、导向板或导向槽、行走轮等导向和行走部件受力较大、不均衡,造成过度磨损或损坏以及能量损耗等问题。
技术实现思路
1、针对上述问题,发明人提供了一种导向式搬运车的力矩平衡控制方法,通过检测导向件的受力情况来调整各行走轮的驱动力矩或制动力矩,从而实现搬运车航向上的转动力矩平衡,使得搬运车行驶更平稳,且能够减少行走部件和导向件的磨损。
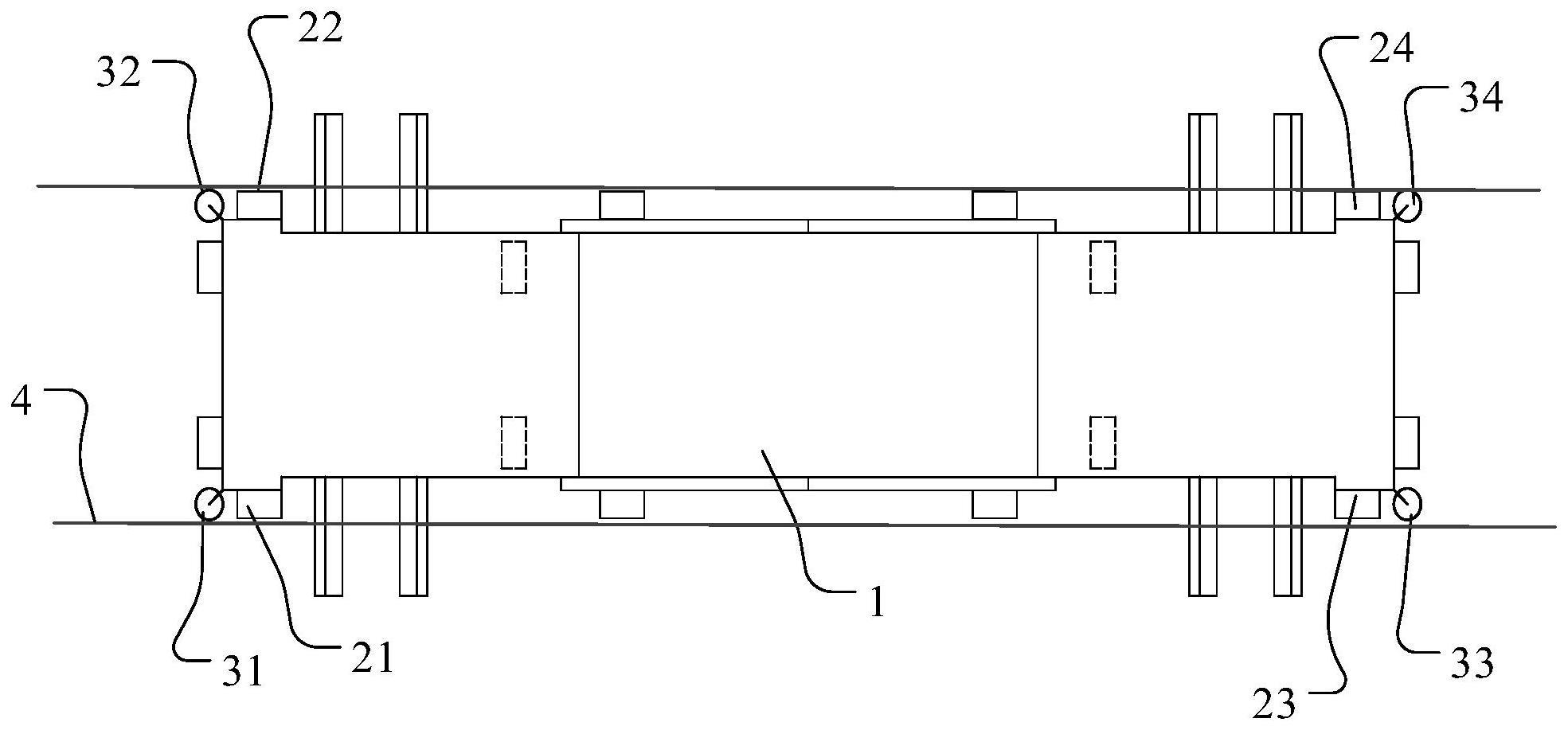
2、本发明提供了一种导向式搬运车的力矩平衡控制方法,导向式搬运车沿导轨移动,其上的导向件与导轨相接触,导向式搬运车偏转,导向件对导轨的作用力使导向件受到导轨的反作用力;
3、在导向式搬运车的各导向件上设置测力装置,用于测量导向件的受力情况;
4、在导向式搬运车的各行走装置上设置转速传感器或/和转矩传感器,所述转速传感器用于检测各行走轮的转速,所述转矩传感器用于检测各行走轮所受转矩;
5、各导向件对导轨的作用力对导向式搬运车中心或质心的力矩之和形成导向式搬运车航向的偏转力矩;各个行走轮对车体的作用力对导向式搬运车中心或质心的力矩之和形成导向式搬运车航向的纠偏力矩;
6、所述方法包括:
7、步骤s1:获取导向式搬运车当前状态下测力装置所测的导向件受力数据,当导向件受力出现异常增大时,判断并计算得到导向式搬运车的偏转力矩;
8、步骤s2:基于力矩平衡原理,根据导向式搬运车偏转力矩控制各行走轮的输出转矩或制动力矩,进而控制各行走轮对车体的纠偏力矩,使偏转力矩与纠偏力矩达到力矩平衡,导向式搬运车恢复预定航向稳定行驶,测力装置所测的各导向件受力数据大小均衡或符合预期。
9、进一步地,所述导向件包括:左前导向件、右前导向件、左后导向件和右后导向件;
10、左和右方位是指导向件分别位于导向式搬运车纵轴线两侧,前和后方位是指导向件分别位于导向式搬运车横轴线两侧,纵轴线与横轴线的相交点为导向式搬运车的中心或质心,以左和右方位以及前和后方位联合定位导向件表述导向件与导向式搬运车的中心或质心的位置关系;
11、所述步骤s1包括:当导向式搬运车纵向行驶时,测力装置检测到左或/和右方位的导向件中,至少一个导向件所受的反作用力增大时,根据各导向件的作用力对车体中心或质心的力矩之和的方向,判断导向式搬运车向预期航向的一侧发生偏转,并计算得出偏转力矩;或者
12、当导向式搬运车横向行驶时,测力装置检测到前或/和后方位的导向件中,至少一个导向件所受的反作用力增大时,根据各导向件的作用力对车体中心或质心的力矩之和的方向,判断导向式搬运车向预期航向的一侧发生偏转,并计算得出偏转力矩。
13、进一步地,所述行走轮包括:驱动轮和支撑轮;
14、所述导向件包括:沿导向式搬运车纵轴线方向或平行于纵轴线方向布置的前导向件和后导向件;沿导向式搬运车横轴线方向或平行于横轴线方向布置的左导向件和右导向件;
15、左和右方位是指导向件分别位于导向式搬运车纵轴线两侧,前和后方位是指导向件分别位于导向式搬运车横轴线两侧,纵轴线与横轴线的相交点为导向式搬运车的中心或质心;
16、所述步骤s1包括:当导向式搬运车纵向行驶时,测力装置检测到前或/和后导向件中,至少一个导向件所受的反作用力增大时,根据各导向件的作用力对车体中心或质心的力矩之和的方向,判断导向式搬运车向预期航向的一侧发生偏转,并计算得出偏转力矩;或者
17、当导向式搬运车横向行驶时,测力装置检测到左或/和右导向件中,至少一个导向件所受的反作用力增大时,根据各导向件的作用力对车体中心或质心的力矩之和的方向,判断导向式搬运车向预期航向的一侧发生偏转,并计算得出偏转力矩。
18、进一步地,所述步骤s2包括:
19、根据力矩平衡由偏转力矩得出纠偏力矩,将纠偏力矩分解为控制驱动轮对导向式搬运车中心或质心的力矩,增大偏转侧的驱动轮的输出转矩,增大其转速,进而增大驱动轮对车体的作用力;
20、或者减小偏转相对侧的驱动轮的输出转矩降低其转速,进而增加偏转相对侧的驱动轮对车体相对于行进方向上反向的作用力;
21、或者增大偏转侧的驱动轮对车体的作用力并增大偏转相对侧的驱动轮对车体反向的作用力;
22、各个受控驱动轮对车体的作用力对导向式搬运车中心或质心的力矩之和形成纠偏力矩。
23、进一步地,所述驱动轮和/或支撑轮设有制动装置;
24、导向式搬运车向一侧发生偏转时,根据力矩平衡由偏转力矩得出纠偏力矩,将纠偏力矩分解为控制驱动轮和/或支撑轮对导向式搬运车中心或质心的力矩,通过制动装置向偏转相对侧的驱动轮和/或支撑轮施加制动力矩,减小其转速,进而增加偏转相对侧的驱动轮对车体相对于行进方向上反向的作用力,各个被制动的驱动轮和/或支撑轮对车体相对于行进方向上反向的作用力对导向式搬运车中心或质心的力矩之和形成纠偏力矩。
25、与现有技术相比,本发明的有益效果:
26、本发明提供的导向式搬运车的力矩平衡控制方法,针对导向式搬运车特有的导向结构,以测量导向件的受力作为反馈量,以行走轮的所受驱动转矩或制动转矩作为控制量,形成闭环控制,最终使偏转力矩与纠偏力矩基本或接近达到力矩平衡,各导向件受力趋近均衡或降低,使得搬运车行驶平稳,并减少行走部件和导向件的磨损以及能量损耗。
技术特征:
1.一种导向式搬运车的力矩平衡控制方法,导向式搬运车沿导轨移动,其上的导向件与导轨相接触,导向式搬运车偏转,导向件对导轨的作用力使导向件受到导轨的反作用力,其特征在于,
2.如权利要求1所述的方法,其特征在于,所述行走轮包括:驱动轮和支撑轮;
3.如权利要求1所述的方法,其特征在于,所述行走轮包括:驱动轮和支撑轮;
4.如权利要求2或3所述的方法,其特征在于,所述步骤s2包括:
5.如权利要求2或3所述的方法,其特征在于,所述驱动轮和/或支撑轮设有制动装置;
技术总结
本发明公开了一种导向式搬运车的力矩平衡控制方法,在导向式搬运车的各导向件上设置测力装置,在导向式搬运车的各行走轮上设置转矩传感器或/和转速传感器,通过获取导向式搬运车当前状态下测力装置所测的导向件受力数据,判断出是否存在偏转情况,当出现偏转时,基于力矩平衡原理,根据各导向件形成的偏转力矩分解控制各行走轮的输出转矩,输出转矩的变化会产生纠偏力矩,利用纠偏力矩与来平衡偏转力矩,从而使得搬运车行驶平稳,并减少行走轮和导向件的磨损。
技术研发人员:喻锐,张献军,王志德,洪飞,陈燕林,李娇,李志涛,曾杨
受保护的技术使用者:云南昆船智能装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!