牵引车对接辅助方法、装置、设备及存储介质与流程
本发明涉及智能驾驶,尤其涉及一种牵引车对接辅助方法、装置、设备及存储介质。
背景技术:
1、甩挂运输有广义和狭义之分,广义来说,各种可以更换挂车的运输方式都可以叫做甩挂运输。狭义来说,甩挂运输就是用一台牵引车将装有货物的挂车运至目的地,将挂车换下后,换上新的挂车运往另一目的地的运输方式。甩挂运输中,牵引车和挂车是属于两个不同的车种,都有各自的行驶证和运营证,可以实现同牵引车上不同挂车的更换。甩挂运输节省了装卸货时间提升了车辆运输生产效率。牵引车与挂车之间通过鞍座与牵引销对接,目标在对接的过程中,一般需要一名驾驶员和一名观察指挥员,挂接效率低且人力成本高。
技术实现思路
1、本发明的主要目的在于提供了一种牵引车对接辅助方法、装置、设备及存储介质,旨在解决现有技术中牵引车与挂车的挂接效率低且人力成本高的技术问题。
2、为实现上述目的,本发明提供了一种牵引车对接辅助方法,所述方法应用于挂接辅助控制器,所述挂接辅助控制器设置在牵引车上,所述牵引车上设置有至少一个摄像头,所述方法包括以下步骤:
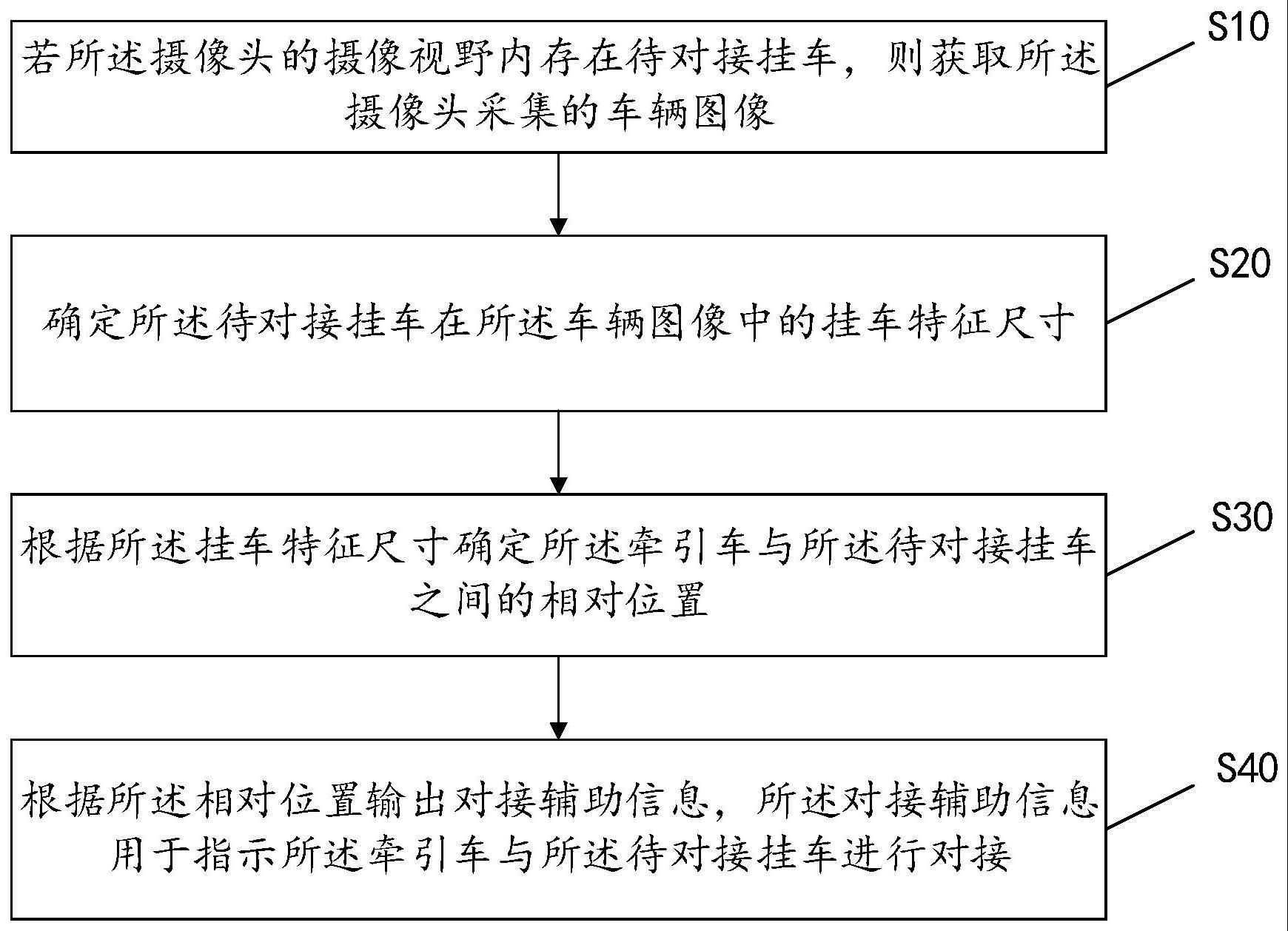
3、若所述摄像头的摄像视野内存在待对接挂车,则获取所述摄像头采集的车辆图像;
4、确定所述待对接挂车在所述车辆图像中的挂车特征尺寸;
5、根据所述挂车特征尺寸确定所述牵引车与所述待对接挂车之间的相对位置;
6、根据所述相对位置输出对接辅助信息,所述对接辅助信息用于指示所述牵引车与所述待对接挂车进行对接。
7、可选地,所述确定所述待对接挂车在所述车辆图像中的挂车特征尺寸,包括:
8、从所述车辆图像中提取所述待对接挂车的挂车特征图像;
9、对所述挂车特征图像进行像素点遍历,并根据遍历结果确定所述待对接挂车在所述车辆图像中的挂车特征尺寸。
10、可选地,所述确定所述待对接挂车在所述车辆图像中的挂车特征尺寸,还包括:
11、确定所述车辆图像中的特征图像边界,并根据所述特征图像边界从所述车辆图像中提取目标特征图像,所述目标特征图像中包含牵引车特征图像和挂车特征图像;
12、对所述目标特征图像进行像素点遍历,并根据遍历结果确定目标特征尺寸;
13、根据所述目标特征尺寸和所述牵引车特征图像中的牵引车特征尺寸确定所述待对接挂车在所述车辆图像中的挂车特征尺寸。
14、可选地,所述根据所述挂车特征尺寸确定所述牵引车与所述待对接挂车之间的相对位置,包括:
15、根据所述挂车特征尺寸确定所述车辆图像中牵引车特征图像的图像边界与挂车特征图像的图像边界之间的距离;
16、根据所述距离确定所述牵引车与所述待对接挂车之间的相对位置。
17、可选地,所述至少一个摄像头包括第一摄像头和第二摄像头,所述第一摄像头和所述第二摄像头分别设置在所述牵引车的两侧,所述挂车特征尺寸包括第一挂车特征尺寸和第二挂车特征尺寸;
18、所述确定所述待对接挂车在所述车辆图像中的挂车特征尺寸,包括:
19、根据所述第一摄像头采集的第一车辆图像确定所述待对接挂车在所述第一车辆图像中的第一挂车特征尺寸;
20、根据所述第二摄像头采集的第二车辆图像确定所述待对接挂车在所述第二车辆图像中的第二挂车特征尺寸。
21、可选地,所述根据所述挂车特征尺寸确定所述牵引车与所述待对接挂车之间的相对位置,包括:
22、根据所述第一挂车特征尺寸确定所述第一车辆图像中牵引车特征图像的图像边界与挂车特征图像的图像边界之间的第一距离;
23、根据所述第二挂车特征尺寸确定所述第二车辆图像中牵引车特征图像的图像边界与挂车特征图像的图像边界之间的第二距离;
24、根据所述第一距离和所述第二距离确定所述牵引车与所述待对接挂车之间的相对位置。
25、可选地,所述根据所述相对位置输出对接辅助信息,包括:
26、若所述相对位置为所述牵引车相对于所述待对接挂车处于居中位置,则输出对齐提示信息。
27、此外,为实现上述目的,本发明还提出一种牵引车对接辅助装置,所述牵引车对接辅助装置包括挂接辅助控制器,所述挂接辅助控制器设置在牵引车上,所述牵引车上设置有至少一个摄像头;
28、所述牵引车对接辅助装置包括:
29、获取模块,用于若所述摄像头的摄像视野内存在待对接挂车,则获取所述摄像头采集的车辆图像;
30、尺寸确定模块,用于确定所述待对接挂车在所述车辆图像中的挂车特征尺寸;
31、位置确定模块,用于根据所述挂车特征尺寸确定所述牵引车与所述待对接挂车之间的相对位置;
32、输出模块,用于根据所述相对位置输出对接辅助信息,所述对接辅助信息用于指示所述牵引车与所述待对接挂车进行对接。
33、此外,为实现上述目的,本发明还提出一种牵引车对接辅助设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的牵引车对接辅助程序,所述牵引车对接辅助程序配置为实现如上文所述的牵引车对接辅助方法的步骤。
34、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有牵引车对接辅助程序,所述牵引车对接辅助程序被处理器执行时实现如上文所述的牵引车对接辅助方法的步骤。
35、本发明实施例提出一种牵引车对接辅助方法,所述方法应用于挂接辅助控制器,所述挂接辅助控制器设置在牵引车上,所述牵引车上设置有至少一个摄像头;通过若所述摄像头的摄像视野内存在待对接挂车,则获取所述摄像头采集的车辆图像;确定所述待对接挂车在所述车辆图像中的挂车特征尺寸;根据所述挂车特征尺寸确定所述牵引车与所述待对接挂车之间的相对位置;根据所述相对位置输出对接辅助信息,所述对接辅助信息用于指示所述牵引车与所述待对接挂车进行对接。本发明实施例通过确定待对接挂车在车辆图像中的挂车特征尺寸,根据挂车特征尺寸确定牵引车与待对接挂车之间的相对位置,从而输出用于指示牵引车与挂车对接的对接辅助信息,使得驾驶员根据该对接辅助信息调节牵引车与待对接挂车进行对接,提高了挂接效率且降低了人力成本。
技术特征:
1.一种牵引车对接辅助方法,其特征在于,所述方法应用于挂接辅助控制器,所述挂接辅助控制器设置在牵引车上,所述牵引车上设置有至少一个摄像头;
2.如权利要求1所述的方法,其特征在于,所述确定所述待对接挂车在所述车辆图像中的挂车特征尺寸,包括:
3.如权利要求1所述的方法,其特征在于,所述确定所述待对接挂车在所述车辆图像中的挂车特征尺寸,还包括:
4.如权利要求1-3任一项所述的方法,其特征在于,所述根据所述挂车特征尺寸确定所述牵引车与所述待对接挂车之间的相对位置,包括:
5.如权利要求1-3任一项所述的方法,其特征在于,所述至少一个摄像头包括第一摄像头和第二摄像头,所述第一摄像头和所述第二摄像头分别设置在所述牵引车的两侧,所述挂车特征尺寸包括第一挂车特征尺寸和第二挂车特征尺寸;
6.如权利要求5所述的方法,其特征在于,所述根据所述挂车特征尺寸确定所述牵引车与所述待对接挂车之间的相对位置,包括:
7.如权利要求1-3任一项所述的方法,其特征在于,所述根据所述相对位置输出对接辅助信息,包括:
8.一种牵引车对接辅助装置,其特征在于,所述牵引车对接辅助装置包括挂接辅助控制器,所述挂接辅助控制器设置在牵引车上,所述牵引车上设置有至少一个摄像头;
9.一种牵引车对接辅助设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的牵引车对接辅助程序,所述牵引车对接辅助程序配置为实现如权利要求1至7中任一项所述的牵引车对接辅助方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有牵引车对接辅助程序,所述牵引车对接辅助程序被处理器执行时实现如权利要求1至7任一项所述的牵引车对接辅助方法的步骤。
技术总结
本发明公开了一种牵引车对接辅助方法、装置、设备及存储介质,该方法应用于挂接辅助控制器,挂接辅助控制器设置在牵引车上,牵引车上设置有至少一个摄像头;若摄像头的摄像视野内存在待对接挂车,则获取摄像头采集的车辆图像;确定待对接挂车在车辆图像中的挂车特征尺寸;根据挂车特征尺寸确定牵引车与待对接挂车之间的相对位置;根据相对位置输出对接辅助信息,对接辅助信息用于指示牵引车与待对接挂车进行对接。根据挂车特征尺寸确定牵引车与待对接挂车之间的相对位置,从而输出用于指示牵引车与挂车对接的对接辅助信息,使得驾驶员根据该对接辅助信息调节牵引车与待对接挂车进行对接,提高了挂接效率且降低了人力成本。
技术研发人员:方龙威,张奇,于成彪,林涛,高原,于军
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!