车辆控制装置、车辆控制方法及存储介质与流程
本发明涉及车辆控制装置、车辆控制方法及存储介质。
背景技术:
1、近年来,关于自动地控制车辆的研究不断进展。与此相关联,已知有如下技术:在与本车道上在本车辆的前方行驶的对象车辆之间的距离及速度满足规定条件的情况下,以第一自动驾驶模式执行自动驾驶,在不再满足规定条件的情况下,以规定速度以下的速度向在其他车道上行驶的其他车辆的后方进行车道变更(例如,日本特开2019-6280号公报)。
2、然而,在以往的技术中,存在在前进道路变更时,自动驾驶的状态下的对乘员要求的要求任务、自动化率切换的情况。
技术实现思路
1、本发明的一方案是考虑这样的情况而完成的,其目的之一在于提供能够基于本车辆的周边环境来执行更稳定的驾驶控制的车辆控制装置、车辆控制方法及存储介质。
2、本发明的车辆控制装置、车辆控制方法及存储介质采用了以下的结构。
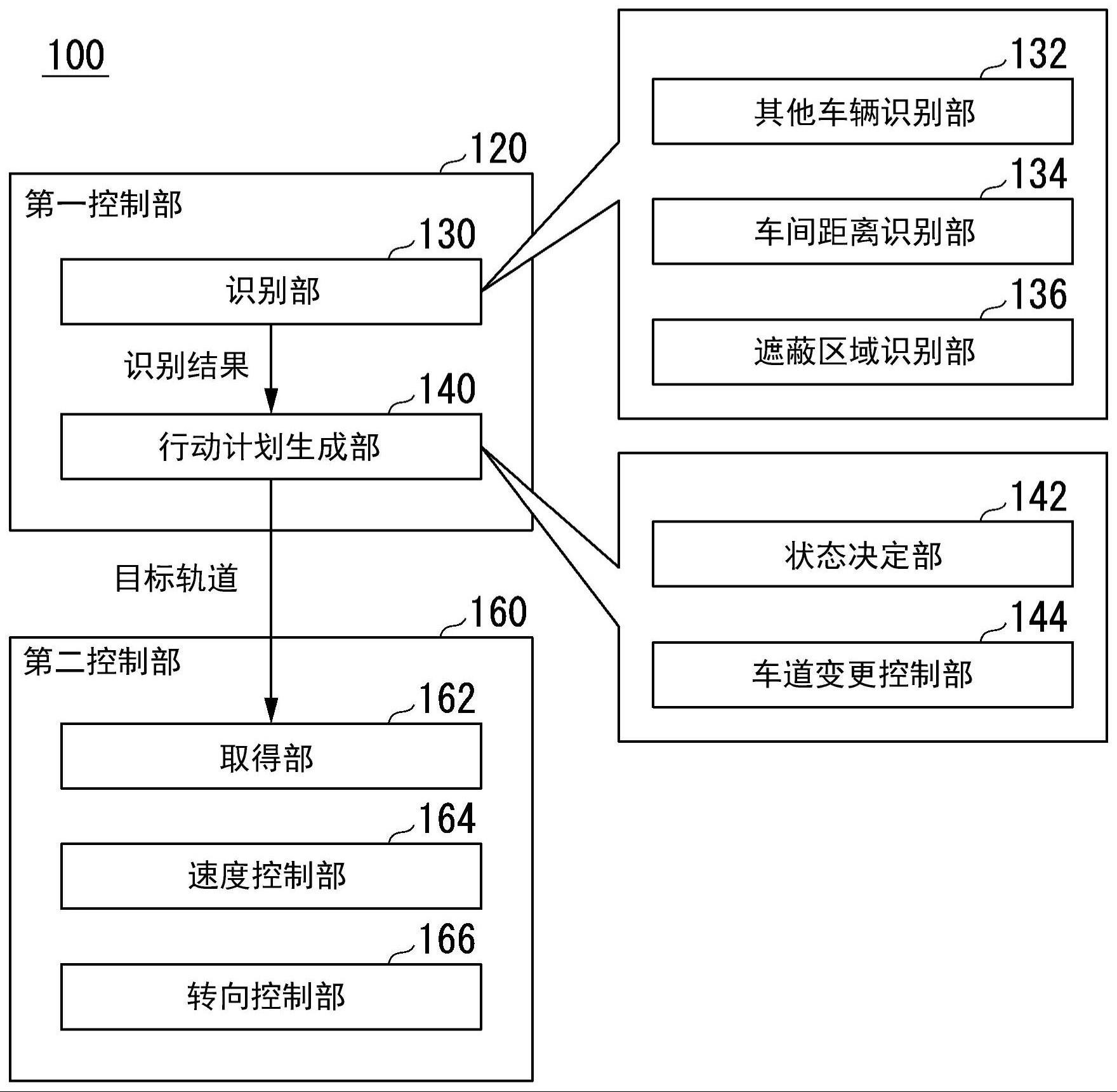
3、(1):本发明的一方案的车辆控制装置具备:识别部,其识别本车辆的周边环境;以及驾驶控制部,其基于所述识别部的识别结果,来控制所述本车辆的速度及转向中的一方或双方而进行驾驶控制,所述驾驶控制部至少以第一驾驶状态、以及与所述第一驾驶状态相比自动化率高或对所述本车辆的乘员要求的要求任务少的第二驾驶状态中的任一方,进行所述驾驶控制,以所述第二驾驶状态执行所述本车辆的前进道路变更的动作环境与所述第一驾驶状态的情况相比被限制。
4、(2):在上述(1)的方案中,所述驾驶控制部在不能以所述第二驾驶状态执行所述前进道路变更的动作环境下接受到所述前进道路变更的要求的情况下,使所述驾驶控制从所述第二驾驶状态向所述第一驾驶状态转移。
5、(3):在上述(1)的方案中,所述识别部识别在所述本车辆行驶的第一车道上在所述本车辆的前方行驶的前行车辆与在所述本车辆的后方行驶的后续车辆之间的第一车间距离,所述驾驶控制部使以所述第二驾驶状态执行所述前进道路变更的第一车间距离比以所述第一驾驶状态执行所述前进道路变更的车间距离短。
6、(4):在上述(1)的方案中,所述识别部识别因在所述本车辆行驶的第一车道上在所述本车辆的前方行驶的前行车辆引起的第一遮蔽区域、以及因在所述本车辆的后方行驶的后续车辆引起的第二遮蔽区域,所述驾驶控制部在所述第一遮蔽区域及所述第二遮蔽区域小于规定区域的情况下,以所述第二驾驶状态执行所述前进道路变更。
7、(5):在上述(1)的方案中,所述识别部识别所述本车辆的前进道路变更目的地的其他车辆,所述驾驶控制部在由所述识别部识别到的其他车辆的速度小于基于所述本车辆的速度、对所述本车辆设定的设定速度、以及所述前进道路变更目的地的第二车道的法定速度中的至少一方而设定的速度的情况下,以所述第二驾驶状态进行所述本车辆向所述第二车道的前进道路变更。
8、(6):在上述(5)的方案中,在未预测到在所述第二车道上行驶的其他车辆的前进道路变更的情况下,所述驾驶控制部进行所述第二驾驶状态下的前进道路变更。
9、(7):在上述(1)的方案中,所述驾驶控制部相比于规定时间或规定行驶距离的所述第一驾驶状态下的前进道路变更的上限次数,限制规定时间或规定行驶距离的所述第二驾驶状态下的前进道路变更的上限次数。
10、(8):在上述(1)的方案中,所述驾驶控制部在所述本车辆的位置为距规定区域规定距离以内的情况下,抑制所述第二驾驶状态下的前进道路变更。
11、(9):在上述(1)的方案中,所述识别部识别其他车辆的行为,或者预测所述其他车辆的将来的行为,所述驾驶控制部基于由所述识别部识别到的所述其他车辆的行为或由所述识别部预测到的所述其他车辆的将来的行为,来执行所述第二驾驶状态下的前进道路变更。
12、(10):在上述(9)的方案中,所述驾驶控制部在基于由所述识别部识别的识别结果而预测到其他车辆向所述本车辆的前进道路变更目的地的目标位置进行前进道路变更的情况下,抑制所述第二驾驶状态下的前进道路变更。
13、(11):在上述(1)的方案中,所述识别部识别在所述本车辆行驶的第一车道上在所述本车辆的前方行驶的其他车辆的车辆信息、以及在所述前进道路变更目的地的第二车道上在所述本车辆的前进道路变更后所述本车辆追随的其他车辆的车辆信息,所述驾驶控制部执行追随与所述本车辆的车辆信息之间的类似程度高的其他车辆的驾驶控制。
14、(12):本发明的一方案的车辆控制方法使车载计算机进行如下处理:识别本车辆的周边环境;基于识别结果,来控制所述本车辆的速度及转向中的一方或双方而进行驾驶控制;以及至少以第一驾驶状态、以及与所述第一驾驶状态相比自动化率高或对所述本车辆的乘员要求的要求任务少的第二驾驶状态中的任一方,进行所述驾驶控制,以所述第二驾驶状态执行所述本车辆的前进道路变更的动作环境与所述第一驾驶状态的情况相比被限制。
15、(13):本发明的一方案的存储介质存储有程序,所述程序使车载计算机进行如下处理:识别本车辆的周边环境;基于识别结果,来控制所述本车辆的速度及转向中的一方或双方而进行驾驶控制;以及至少以第一驾驶状态、以及与所述第一驾驶状态相比自动化率高或对所述本车辆的乘员要求的要求任务少的第二驾驶状态中的任一方,进行所述驾驶控制,以所述第二驾驶状态执行所述本车辆的前进道路变更的动作环境与所述第一驾驶状态的情况相比被限制。
16、根据上述(1)~(13)的方案,能够基于本车辆的周边环境,来执行更稳定的驾驶控制。
技术特征:
1.一种车辆控制装置,其中,
2.根据权利要求1所述的车辆控制装置,其中,
3.根据权利要求1所述的车辆控制装置,其中,
4.根据权利要求1所述的车辆控制装置,其中,
5.根据权利要求1所述的车辆控制装置,其中,
6.根据权利要求1所述的车辆控制装置,其中,
7.根据权利要求6所述的车辆控制装置,其中,
8.根据权利要求1所述的车辆控制装置,其中,
9.根据权利要求1所述的车辆控制装置,其中,
10.根据权利要求9所述的车辆控制装置,其中,
11.根据权利要求1所述的车辆控制装置,其中,
12.一种车辆控制方法,其中,
13.一种存储介质,其存储有程序,其中,
技术总结
提供能够基于本车辆的周边环境来执行更稳定的驾驶控制的车辆控制装置、车辆控制方法及存储介质。实施方式的车辆控制装置具备:识别部,其识别本车辆的周边环境;以及驾驶控制部,其基于所述识别部的识别结果,来控制所述本车辆的速度及转向中的一方或双方而进行驾驶控制,所述驾驶控制部至少以第一驾驶状态、以及与所述第一驾驶状态相比自动化率高或对所述本车辆的乘员要求的要求任务少的第二驾驶状态中的任一方,进行所述驾驶控制,以所述第二驾驶状态执行所述本车辆的前进道路变更的动作环境与所述第一驾驶状态的情况相比被限制,所述驾驶控制部控制规定时间或规定行驶距离的所述第一驾驶状态及所述第二驾驶状态下的前进道路变更的上限次数。
技术研发人员:小黑千寻,八代胜也,堀场步,加纳忠彦,高田雄太
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!