追随行驶支援装置、追随行驶支援方法以及计算机程序与流程
本发明涉及追随行驶支援装置、追随行驶支援方法以及计算机程序。
背景技术:
1、在专利文献1中,记载了在本车辆进行追随先行车的追随行驶时,根据其他车辆插进本车辆与先行车之间的空间的插进状况,校正与先行车的目标车辆间距离。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开平5-141285号公报
技术实现思路
1、在后续车追随先行车的追随行驶中,通过先行车的挡风效果,对后续车作用的空气阻力降低,后续车中的燃料消耗量或者电力消耗量降低。
2、然而,即使本车辆的乘员希望向其他车辆的追随行驶,作为追随对象适合的车辆未必在本车辆的附近行驶。另外,考虑在如针对追随行驶中的先行车提供某种奖励的情况下,本车辆的乘员希望其他车辆向本车辆的追随行驶。然而,即使在该情况下,希望追随行驶的车辆也未必在本车辆的附近行驶。特别是,在与本车辆一起进行追随行驶的配对车辆(追随行驶中的先行车或者后续车)在远离本车辆的位置处以与本车辆同样的速度行驶的情况下,本车辆难以遇到配对车辆来开始追随行驶。
3、因此,鉴于上述课题,本发明的目的在于,提高本车辆遇到与本车辆一起进行后续车追随先行车的追随行驶的配对车辆的概率。
4、本公开的要旨如以下所述。
5、(1)一种追随行驶支援装置,具备:车辆检测部,检测本车辆的周围的周边车辆;以及车速设定部,设定所述本车辆的目标车速,所述车速设定部直至作为所述周边车辆检测到与所述本车辆一起进行后续车追随先行车的追随行驶的配对车辆为止,将所述目标车速设定为与所述本车辆的设定速度不同的速度。
6、(2)在上述(1)记载的追随行驶支援装置,其中,所述本车辆的设定速度是由所述本车辆的乘员设定的自适应巡航控制的设定速度,所述车速设定部以使所述本车辆的速度成为所述目标车速的方式,控制所述本车辆的加减速。
7、(3)在上述(2)记载的追随行驶支援装置,其中,所述车速设定部经由所述本车辆的输出装置,对所述本车辆的乘员通知所述本车辆的速度从所述自适应巡航控制的设定速度变更。
8、(4)在上述(1)记载的追随行驶支援装置,其中,由所述本车辆的驾驶员控制所述本车辆的加减速,所述车速设定部经由所述本车辆的输出装置,对所述本车辆的驾驶员通知所述目标车速。
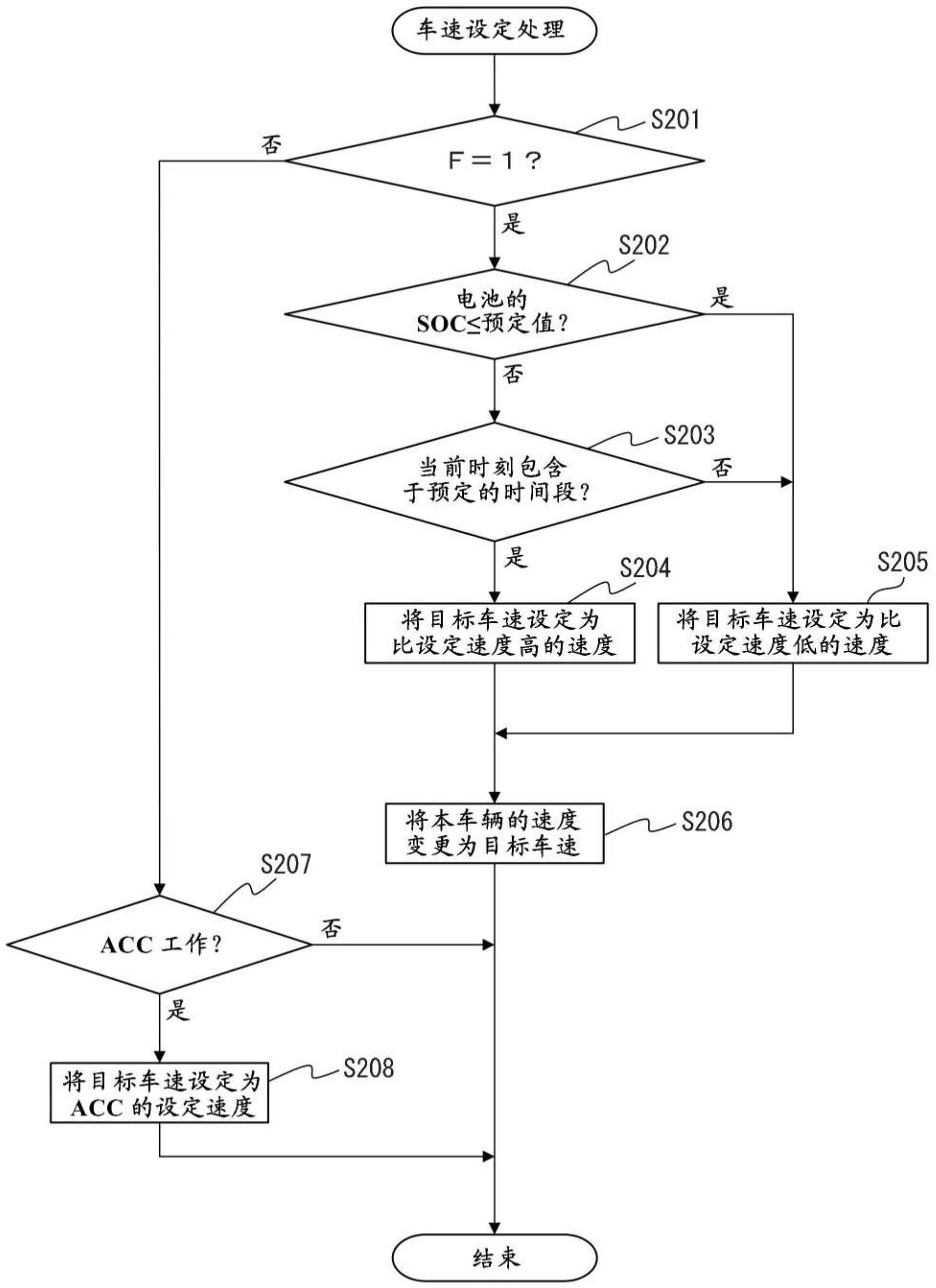
9、(5)在上述(1)至(4)中的任意1个记载的追随行驶支援装置,其中,所述车速设定部在所述本车辆的电池的soc或者所述本车辆的燃料剩余量是预定值以下的情况下,直至作为所述周边车辆检测到所述配对车辆为止,将所述目标车速设定为比所述设定速度低的速度。
10、(6)在上述(1)至(5)中的任意1个记载的追随行驶支援装置,其中,所述车速设定部在当前时刻包含于预定的时间段的情况下,直至作为所述周边车辆检测到所述配对车辆为止,将所述目标车速设定为比所述设定速度高的速度。
11、(7)在上述(1)至(4)中的任意1个记载的追随行驶支援装置,其中,所述车速设定部直至作为所述周边车辆检测到所述配对车辆为止,根据由所述本车辆的乘员预先设定的嗜好信息,设定所述目标车速。
12、(8)在上述(1)至(4)中的任意1个记载的追随行驶支援装置,其中,所述车速设定部直至作为所述周边车辆检测到所述配对车辆为止,根据从所述本车辆的外部的服务器发送给所述本车辆的信息,设定所述目标车速。
13、(9)在上述(1)至(4)中的任意1个记载的追随行驶支援装置,其中,所述车速设定部在所述设定速度是预定值以上的情况下,直至作为所述周边车辆检测到所述配对车辆为止,将所述目标车速设定为比所述设定速度低的速度,在所述设定速度小于所述预定值的情况下,直至作为所述周边车辆检测到所述配对车辆为止,将所述目标车速设定为比所述设定速度高的速度。
14、(10)在上述(1)至(9)中的任意1个记载的追随行驶支援装置,其中,所述车速设定部在将所述目标车速设定为与所述本车辆的设定速度不同的速度时,经由所述本车辆的输出装置,对所述本车辆的驾驶员建议向适合于所述目标车速的行车道变更行车道。
15、(11)一种由计算机执行的追随行驶支援方法,包括:检测本车辆的周围的周边车辆;以及直至作为所述周边车辆检测到与所述本车辆一起进行后续车追随先行车的追随行驶的配对车辆为止,将所述本车辆的目标车速设定为与所述本车辆的设定速度不同的速度。
16、(12)一种计算机程序,使计算机执行:检测本车辆的周围的周边车辆;以及直至作为所述周边车辆检测到与所述本车辆一起进行后续车追随先行车的追随行驶的配对车辆为止,将所述本车辆的目标车速设定为与所述本车辆的设定速度不同的速度。
17、根据本发明,能够提高本车辆遇到与本车辆一起进行后续车追随先行车的追随行驶的配对车辆的概率。
技术特征:
1.一种追随行驶支援装置,具备:
2.根据权利要求1所述的追随行驶支援装置,其中,
3.根据权利要求2所述的追随行驶支援装置,其中,
4.根据权利要求1所述的追随行驶支援装置,其中,
5.根据权利要求1至4中的任意一项所述的追随行驶支援装置,其中,
6.根据权利要求1至4中的任意一项所述的追随行驶支援装置,其中,
7.根据权利要求1至4中的任意一项所述的追随行驶支援装置,其中,
8.根据权利要求1至4中的任意一项所述的追随行驶支援装置,其中,
9.根据权利要求1至4中的任意一项所述的追随行驶支援装置,其中,
10.根据权利要求1至4中的任意一项所述的追随行驶支援装置,其中,
11.一种由计算机执行的追随行驶支援方法,包括:
12.一种计算机程序,使计算机执行:
技术总结
本发明公开追随行驶支援装置、追随行驶支援方法以及计算机程序。提高本车辆遇到与本车辆一起进行后续车追随先行车的追随行驶的配对车辆的概率。追随行驶支援装置具备:车辆检测部(15),检测本车辆的周围的周边车辆;以及车速设定部(16),设定本车辆的目标车速。车速设定部直至作为周边车辆检测到与本车辆一起进行后续车追随先行车的追随行驶的配对车辆为止,将目标车速设定为与本车辆的设定速度不同的速度。
技术研发人员:栗桥翠,渥美善明,白井隼人
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!