一种L3级自动驾驶汽车驾驶员工作任务调节方法及装置与流程
本发明涉及自动驾驶,具体涉及一种l3级自动驾驶汽车驾驶员工作任务调节方法及装置。
背景技术:
1、当车辆进入自动驾驶(l3)的odd时,系统会提示已进入自动驾驶路段,且该功能可以激活。驾驶员通过开关激活l3自动驾驶功能后,车辆能实时监测车辆周边的行驶环境,并控制车辆自动行驶,用以减轻驾驶员驾驶任务,此时驾驶员可以交由系统控制车辆而转移注意力,无需全程监控车辆,但必须随时准备接管车辆。
2、驾驶员在车内的工作任务分为两类:驾驶任务和非驾驶任务。当驾驶任务由自动驾驶系统负责时,驾驶员便可能会将主要精力放在非驾驶任务上(比如玩手机,在车机上看电影等等)。
3、l3自动驾驶系统要求驾驶员始终具备接管车辆的能力,在系统提醒驾驶员接管时,驾驶员能及时接管车辆。
4、驾驶员接管车辆的情景意识(或叫态势感知)模型为:感知、理解、预测、决策,最后再执行。这需要驾驶员一定的时间完成,如果在极短时间完成以上步骤很有可能让驾驶员出现认知负荷过载的情况,最后手忙脚乱导致悲剧的发生。尤其是当驾驶员沉浸在非驾驶任务中,系统提醒驾驶员接管,驾驶员不能及时感知到或者根本感知不到。
技术实现思路
1、本发明的目的在于提供一种一种l3级自动驾驶汽车驾驶员工作任务调节方法及装置,以实现在l3及自动驾驶模式下对驾驶员的感知负荷的及时调控,避免危机情况下驾驶员无法及时作出有效反应而产生的事故。
2、为解决上述技术问题,本发明提供了一种技术方案:一种l3级自动驾驶汽车驾驶员工作任务调节方法,包括以下步骤,
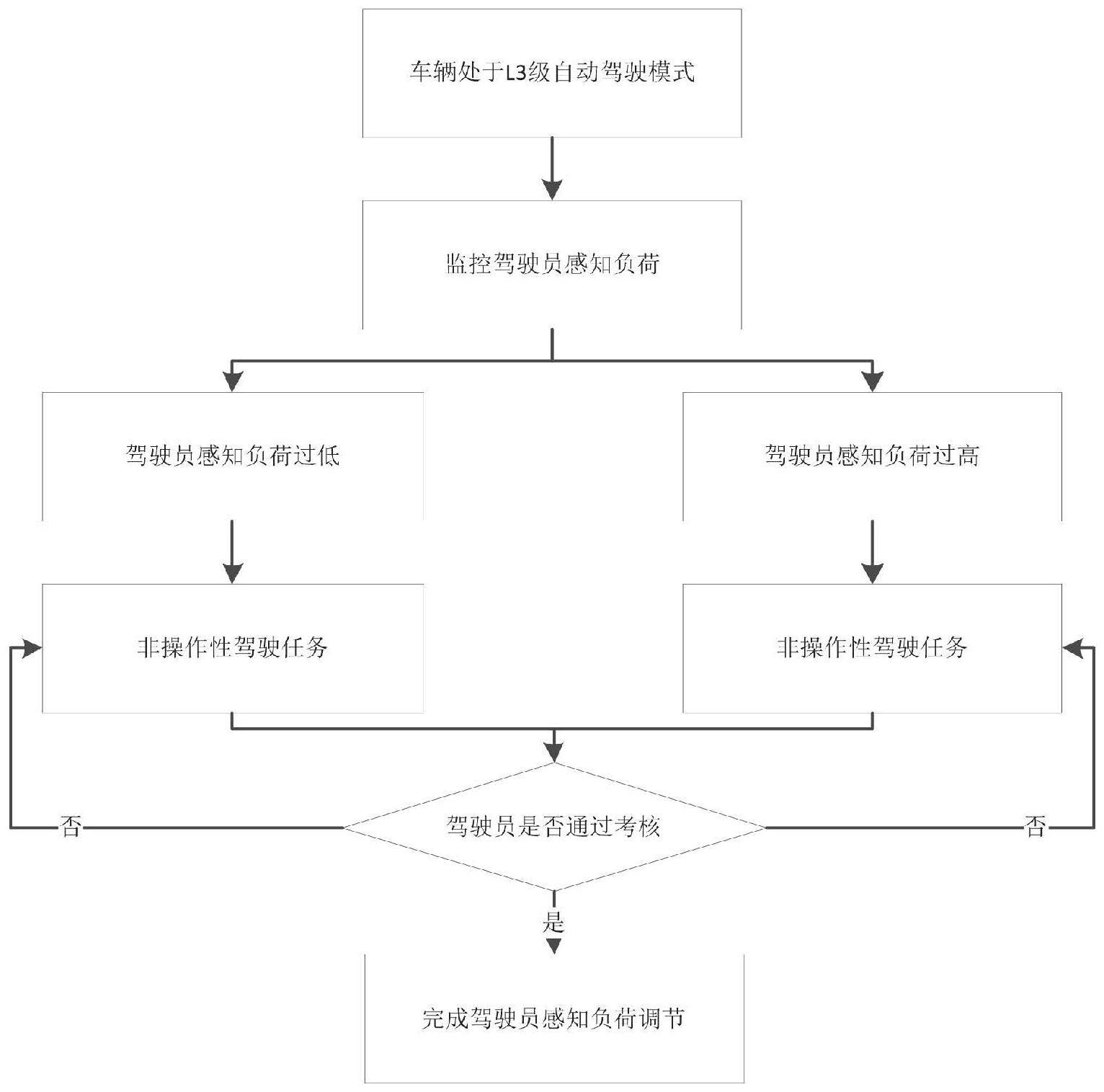
3、s1、当车辆处于l3级自动驾驶模式下时,执行后续步骤;
4、s2、监测驾驶员感知负荷,当驾驶员感知负荷偏离设定区间时执行s3;其中感知负荷表示驾驶员的脑力资源占用率;
5、s3、向驾驶员分配非操作性驾驶任务;
6、s4、根据车辆感知信息对驾驶员的非操作性驾驶任务完成情况进行校验,当驾驶员的非操作性驾驶任务完成情况符合考核标准时,完成对驾驶员感知负荷的调节,返回s1;反之,返回s3。
7、按上述方案,s2中,通过获取驾驶员面部视频或图像对驾驶员感知负荷进行监测。
8、按上述方案,使驾驶员感知负荷低于设定区间的行为包括瞌睡;使驾驶员感知负荷高于设定区间的行为包括转头与后排乘员聊天、观看中控屏的娱乐信息。
9、按上述方案,当驾驶员感知负荷高于设定区间时,暂停车辆的娱乐功能。
10、按上述方案,非操作性驾驶任务的分配方式包括语音提问或中控屏提问。
11、按上述方案,非操作性驾驶任务包括观察并反馈车辆周围环境信息、查看并反馈自动驾驶导航路径信息。
12、按上述方案,当驾驶员的反馈信息与车辆感知信息一致时,判断驾驶员的非操作性驾驶任务完成情况符合考核标准。
13、一种用于实现上文所述l3级自动驾驶汽车驾驶员工作任务调节方法的l3级自动驾驶汽车驾驶员工作任务调节装置,包括,
14、驾驶员状态监控模块,用于监测驾驶员感知负荷并辅助校验驾驶员的非操作性驾驶任务完成情况;
15、自动驾驶环境感知模块,用于获取车辆感知信息;
16、驾驶员工作任务调节模块,用于根据驾驶员感知负荷规划驾驶员的非操作性驾驶任务,并根据车辆感知信息对驾驶员的非操作性驾驶任务完成情况进行校验,判断驾驶员的非操作性驾驶任务完成情况是否符合考核标准;
17、自动驾驶控制模块,用于将进行校验的车辆感知信息发送至驾驶员工作任务调节模块;
18、车载信息娱乐模块,用于向驾驶员下达非操作性驾驶任务,接收驾驶员的非操作性驾驶任务完成结果并反馈至驾驶员工作任务调节模块。
19、按上述方案,驾驶员状态监控模块包括第一摄像头和第二摄像头,第一摄像头设置于车辆左侧a柱上或者仪表盘上方,用于监测驾驶员是否瞌睡、是否转头,并对驾驶员进行视线跟踪;第二摄像头设置于中控屏上方,用于监测驾驶员是否观看中控屏。
20、按上述方案,自动驾驶环境感知模块包括前雷达、激光雷达、前摄像头以及环视摄像头。
21、本发明的有益效果是:通过监测驾驶员感知负荷并相应地分配非操作性驾驶任务,可以有效预防驾驶员疲劳、分神等情况发生,从而降低交通事故的风险,提高了自动驾驶的行车安全性。
技术特征:
1.一种l3级自动驾驶汽车驾驶员工作任务调节方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的l3级自动驾驶汽车驾驶员工作任务调节方法,其特征在于:s2中,通过获取驾驶员面部视频或图像对驾驶员感知负荷进行监测。
3.根据权利要求1所述的l3级自动驾驶汽车驾驶员工作任务调节方法,其特征在于:使驾驶员感知负荷低于设定区间的行为包括瞌睡;使驾驶员感知负荷高于设定区间的行为包括转头与后排乘员聊天、观看中控屏的娱乐信息。
4.根据权利要求1或3所述的l3级自动驾驶汽车驾驶员工作任务调节方法,其特征在于:当驾驶员感知负荷高于设定区间时,暂停车辆的娱乐功能。
5.根据权利要求1所述的l3级自动驾驶汽车驾驶员工作任务调节方法,其特征在于:非操作性驾驶任务的分配方式包括语音提问或中控屏提问。
6.根据权利要求1所述的l3级自动驾驶汽车驾驶员工作任务调节方法,其特征在于:非操作性驾驶任务包括观察并反馈车辆周围环境信息、查看并反馈自动驾驶导航路径信息。
7.根据权利要求5所述的l3级自动驾驶汽车驾驶员工作任务调节方法,其特征在于:当驾驶员的反馈信息与车辆感知信息一致时,判断驾驶员的非操作性驾驶任务完成情况符合考核标准。
8.一种用于实现权利要求1-7任一所述l3级自动驾驶汽车驾驶员工作任务调节方法的l3级自动驾驶汽车驾驶员工作任务调节装置,其特征在于:包括,
9.根据权利要求8所述的l3级自动驾驶汽车驾驶员工作任务调节装置,其特征在于:驾驶员状态监控模块包括第一摄像头和第二摄像头,第一摄像头设置于车辆左侧a柱上或者仪表盘上方,用于监测驾驶员是否瞌睡、是否转头,并对驾驶员进行视线跟踪;第二摄像头设置于中控屏上方,用于监测驾驶员是否观看中控屏。
10.根据权利要求8所述的l3级自动驾驶汽车驾驶员工作任务调节装置,其特征在于:自动驾驶环境感知模块包括前雷达、激光雷达、前摄像头以及环视摄像头。
技术总结
本发明公开了一种L3级自动驾驶汽车驾驶员工作任务调节方法,包括以下步骤,S1、当车辆处于L3级自动驾驶模式下时,执行后续步骤;S2、监测驾驶员感知负荷,当驾驶员感知负荷偏离设定区间时执行S3;S3、向驾驶员分配非操作性驾驶任务;S4、根据车辆感知信息对驾驶员的非操作性驾驶任务完成情况进行校验,当驾驶员的非操作性驾驶任务完成情况符合考核标准时,完成对驾驶员感知负荷的调节,返回S1;反之,返回S3。该方法避免了L3级自动驾驶时驾驶员在紧急情况下因感知负荷失常而无法及时做出判断而导致的危险。
技术研发人员:何班本,吴瑜,边宁,袁晓芳,刘鹏
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!