电子制动助力器的推杆零位修正方法及装置与流程
本申请涉及制动控制,特别涉及一种电子制动助力器的推杆零位修正方法及装置。
背景技术:
1、随着消费者对汽车安全需求的不断提高,在汽车制动领域出现了许多机电产品。与传统的真空助力器相比,电子制动助力器从安装在制动踏板上的推杆位移传感器收集电信号,分析驾驶员踩制动踏板的深度,从而使车辆减速。
2、相关技术中,如专利cn115285093a《一种汽车用电子助力器的推杆零位自学习方法、电子设备》中,根据推杆的零位数据确定有效学习值,并结合当前使用的零位参考值确定目标零位学习值,通过自学习的方式对推杆零位进行计算更新。
3、然而,相关技术中,缺乏在加速过程中过程对推杆零位值的主动修正,会导致长期超负荷运转,不但降低用户的驾乘体验,而且在极端情况下无法准确识别驾驶员意图,危及行车安全性,亟待改进。
技术实现思路
1、本申请提供一种电子制动助力器的推杆零位修正方法及装置,以解决相关技术中,缺乏在加速过程中过程对推杆零位值的主动修正,会导致长期超负荷运转,不但降低用户的驾乘体验,而且在极端情况下无法准确识别驾驶员意图,危及行车安全性等问题。
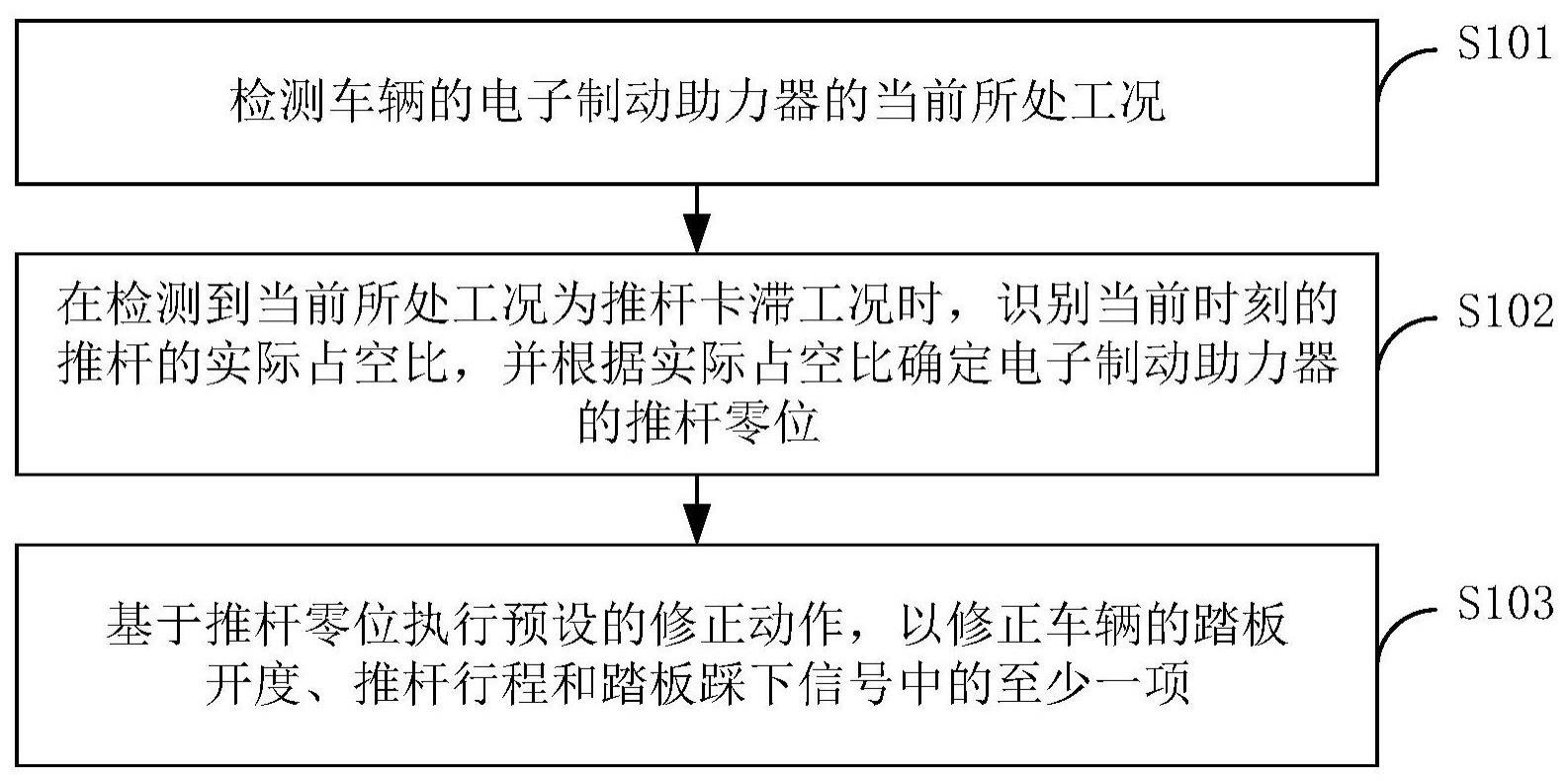
2、本申请第一方面实施例提供一种电子制动助力器的推杆零位修正方法,包括以下步骤:检测车辆的电子制动助力器的当前所处工况;在检测到所述当前所处工况为推杆卡滞工况时,识别当前时刻的推杆的实际占空比,并根据所述实际占空比确定所述电子制动助力器的推杆零位;以及基于所述推杆零位执行预设的修正动作,以修正所述车辆的踏板开度、推杆行程和踏板踩下信号中的至少一项。
3、根据上述技术手段,本申请实施例可以识别推杆卡滞工况并将此时的推杆实际占空比作为新的推杆零位,从而修正踏板开度、推杆行程和踏板踩下信号等参数,提高了车辆的智能化,提高了用户的驾乘体验,保证了车辆的综合安全防护水平。
4、可选地,在本申请的一个实施例中,所述检测电子制动助力器的当前所处工况,包括:判断所述实际占空比是否处于预设卡滞区间,并且采集车辆踏板的踏板速度和踏板开度;如果所述实际占空比处于所述预设卡滞区间、所述踏板开度大于预设开度且所述踏板速度处于预设速度区间,则判定所述当前所处工况为所述推杆卡滞工况。
5、根据上述技术手段,本申请实施例可以通过推杆实际占空比、踏板速度和踏板开度判断推杆卡滞工况,使得判断结果更加精确,提高了车辆的智能化,提升了用户的驾乘体验,保证了车辆的综合安全防护水平。
6、可选地,在本申请的一个实施例中,所述判定所述当前所处工况为所述推杆卡滞工况,包括:计时所述实际占空比处于所述预设卡滞区间、所述踏板开度大于预设开度且所述踏板速度处于预设速度区间的持续时长;在所述持续时长大于预设时长时,确定所述当前所处工况为所述推杆卡滞工况。
7、根据上述技术手段,本申请实施例可以在实际占空比处于一定卡滞区间、踏板开度大于一定开度且所述踏板速度处于预设速度区间的持续时长大于预设时长时,确定当前所处工况为推杆卡滞工况,识别更加准确,提高了车辆的智能化,提升了用户的驾乘体验,保证了车辆的综合安全防护水平。
8、可选地,在本申请的一个实施例中,在判断所述实际占空比是否处于所述预设卡滞区间之前,还包括:由整车下线时学习得到原始推杆零位,以确定所述预设卡滞区间。
9、根据上述技术手段,本申请实施例可以由整车下线时学习得到原始推杆零位,以确定预设卡滞区间,使得计算更加精确,提升了用户的驾乘体验,保证了车辆的综合安全防护水平。
10、可选地,在本申请的一个实施例中,所述基于所述推杆零位执行预设的修正动作,包括:记录所述实际占空比为原始推杆占空比;记录所述电子制动助力器的推杆的卡滞推杆位置以进行双向修正;将所述推杆零位以预设过渡策略过渡到原始推杆零位。
11、根据上述技术手段,本申请实施例可以根据卡滞推杆位置进行双向修正,并将推杆零位过渡到原始推杆零位,提高了车辆的智能化,提升了用户的驾乘体验,保证了车辆的综合安全防护水平。
12、本申请第二方面实施例提供一种电子制动助力器的推杆零位修正装置,包括:检测模块,用于检测车辆的电子制动助力器的当前所处工况;识别模块,用于在检测到所述当前所处工况为推杆卡滞工况时,识别当前时刻的推杆的实际占空比,并根据所述实际占空比确定所述电子制动助力器的推杆零位;以及修正模块,用于基于所述推杆零位执行预设的修正动作,以修正所述车辆的踏板开度、推杆行程和踏板踩下信号中的至少一项。
13、可选地,在本申请的一个实施例中,所述检测模块包括:判断单元,用于判断所述实际占空比是否处于预设卡滞区间,并且采集车辆踏板的踏板速度和踏板开度;判定单元,用于在所述实际占空比处于所述预设卡滞区间、所述踏板开度大于预设开度且所述踏板速度处于预设速度区间时,判定所述当前所处工况为所述推杆卡滞工况。
14、可选地,在本申请的一个实施例中,所述判定单元具体用于计时所述实际占空比处于所述预设卡滞区间、所述踏板开度大于预设开度且所述踏板速度处于预设速度区间的持续时长;在所述持续时长大于预设时长时,确定所述当前所处工况为所述推杆卡滞工况。
15、可选地,在本申请的一个实施例中,所述检测模块还包括:确定单元,用于由整车下线时学习得到所述原始推杆零位,以确定所述预设卡滞区间。
16、可选地,在本申请的一个实施例中,所述修正模块包括:第一记录单元,用于记录所述实际占空比为原始推杆占空比;第二记录单元,用于记录所述电子制动助力器的推杆的卡滞推杆位置以进行双向修正;过渡单元,用于将所述推杆零位以预设过渡策略过渡到原始推杆零位。
17、本申请第三方面实施例提供一种车辆,包括:如上述实施例所述的电子制动助力器的推杆零位修正装置。
18、本申请第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的电子制动助力器的推杆零位修正方法。
19、本申请实施例的有益效果:
20、(1)精准识别推杆卡滞情况,提高识别准确性;
21、(2)对推杆位置进行双向修正并更新,提高了用户的驾乘体验,增加了车辆的智能化;
22、(3)将推杆零位过渡到原始推杆零位,保障了车辆的综合防护水平。
23、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种电子制动助力器的推杆零位修正方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述检测电子制动助力器的当前所处工况,包括:
3.根据权利要求2所述的方法,其特征在于,所述判定所述当前所处工况为所述推杆卡滞工况,包括:
4.根据权利要求2所述的方法,其特征在于,在判断所述实际占空比是否处于所述预设卡滞区间之前,还包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述推杆零位执行预设的修正动作,包括:
6.一种电子制动助力器的推杆零位修正装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述检测模块包括:
8.根据权利要求7所述的装置,其特征在于,所述判定单元具体用于计时所述实际占空比处于所述预设卡滞区间、所述踏板开度大于预设开度且所述踏板速度处于预设速度区间的持续时长;在所述持续时长大于预设时长时,确定所述当前所处工况为所述推杆卡滞工况。
9.一种车辆,其特征在于,包括:如权利要求6-8任一项所述的电子制动助力器的推杆零位修正装置。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求1-5任一项所述的电子制动助力器的推杆零位修正方法。
技术总结
本申请涉及一种电子制动助力器的推杆零位修正方法及装置,其中,方法包括:检测车辆的电子制动助力器的当前所处工况;在检测到当前所处工况为推杆卡滞工况时,识别当前时刻的推杆的实际占空比,并根据实际占空比确定电子制动助力器的推杆零位;基于推杆零位执行预设的修正动作,以修正车辆的踏板开度、推杆行程和踏板踩下信号中的至少一项。本申请实施例可以在推杆卡滞时,将此时的推杆实际占空比作为新的推杆零位,从而修正踏板开度、推杆行程和踏板踩下信号等参数,达到推杆零位修正的目的,提高车辆的智能化,提高用户的驾乘体验,有效保证车辆的综合安全防护水平。
技术研发人员:李万成,郭伟,罗斌,张金强,赵超超
受保护的技术使用者:深蓝汽车科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!