车辆泊车横向控制方法、装置、设备和计算机可读介质与流程
本公开的实施例涉及计算机,具体涉及车辆泊车横向控制方法、装置、设备和计算机可读介质。
背景技术:
1、随着自动驾驶技术的发展,可全天候、全无人、高效等特点让园区物流成为众多细分市场中落地希望较大的场景之一,泊车是物流卡车在园区转运过程中的重要环节,且涉及到装卸货全无人化,对泊车精度也有着较高的要求。目前,在进行车辆泊车横向控制时,通常采用的方式为:将泊车轨迹拆分为直线轨迹和圆弧轨迹的多段轨迹,不同轨迹段对应不同的控制器实现轨迹跟踪优化。或根据倒车目标行驶轨迹实时计算一定范围内最大曲率变化的数据点位置,根据该目标位置与车辆的误差值进行倒车控制,可实现控制系统的提前控制功能,弥补系统延迟等原因导致误差的累积,提升倒车尤其是泊车位控制精准度,另外,在泊车横向控制中前向行驶时定位中心也即车体坐标系原点在前轴中心,倒车时仍以前轴中心为原点计算倒车横向误差,倒车轨迹也以前轴中心为原点。
2、然而,发明人发现,当采用上述方式进行障碍物信息生成时,经常会存在如下技术问题:
3、第一,需要针对不同的控制器设定对应的参数,同时在优化时也需要同步调整,由此,导致增加了控制的复杂程度和优化调整的难度,从而,增大了计算资源的占用;
4、第二,以倒车的后轮速度方向为正方向建立倒车坐标系,导致后轮轮速容易受侧偏角的影响,使得后路轮速方向难以准确的代表车辆速度,由此导致坐标系存在误差,从而,导致出现较大的泊车横向控制误差。
5、该背景技术部分中所公开的以上信息仅用于增强对本发明构思的背景的理解,并因此,其可包含并不形成本国的本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本公开的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本公开的一些实施例提出了车辆泊车横向控制方法、装置、设备和计算机可读介质,来解决以上背景技术部分提到的技术问题中的一项或多项。
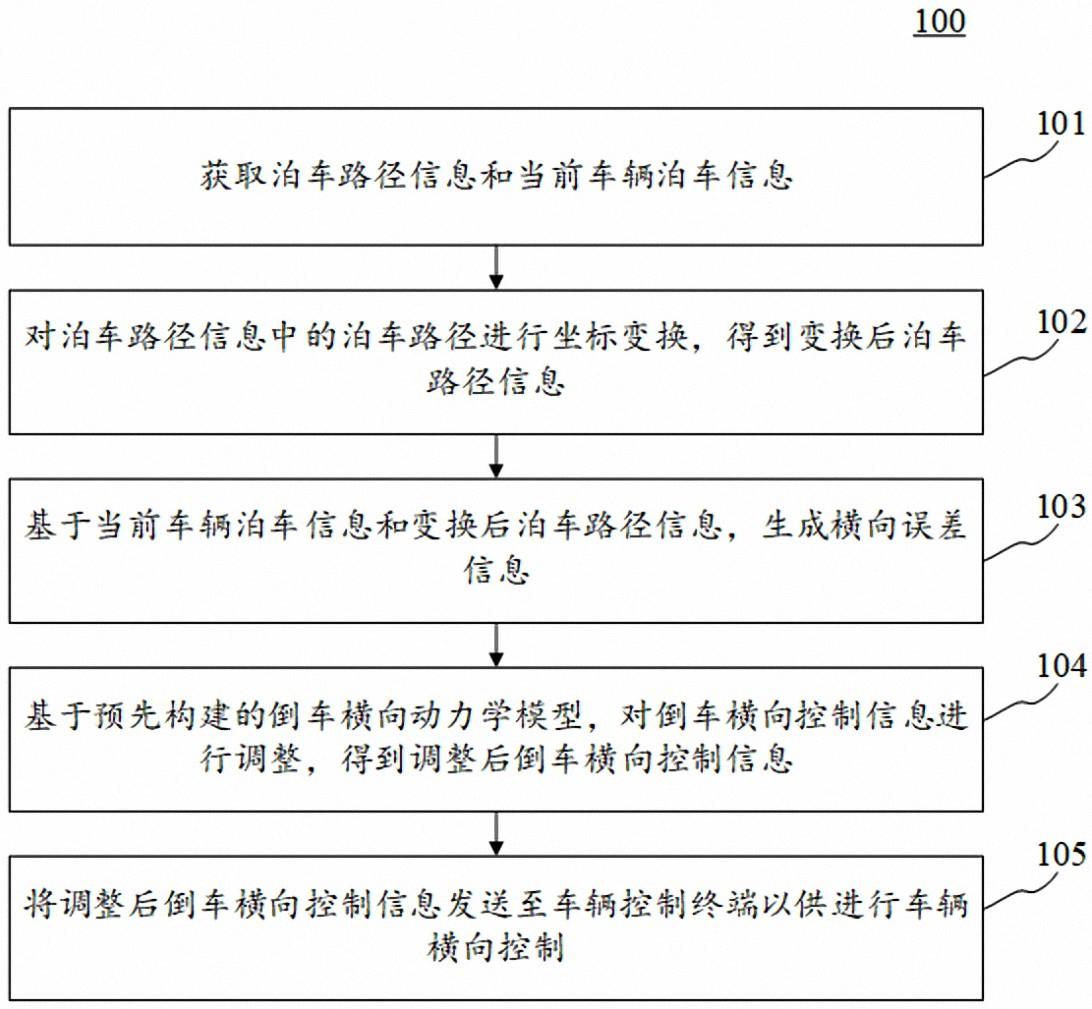
3、第一方面,本公开的一些实施例提供了一种车辆泊车横向控制方法,该方法包括:获取泊车路径信息和当前车辆泊车信息,其中,上述泊车路径信息包括泊车路径,上述泊车路径处于以当前车辆的前轴中心点坐标为坐标原点的前轴中心坐标系;对上述泊车路径信息中的泊车路径进行坐标变换,得到变换后泊车路径信息,其中,上述变换后泊车路径信息包括变换后泊车路径,上述变换后泊车路径处于以当前车辆的后轴中心点坐标为坐标原点的后轴中心坐标系;基于上述当前车辆泊车信息和上述变换后泊车路径信息,生成横向误差信息;基于预先构建的倒车横向动力学模型,对上述倒车横向控制信息进行调整,得到调整后倒车横向控制信息;将上述调整后倒车横向控制信息发送至车辆控制终端以供进行车辆横向控制。
4、第二方面,本公开的一些实施例提供了一种车辆泊车横向控制装置,该装置包括:获取单元,被配置成获取泊车路径信息和当前车辆泊车信息,其中,上述泊车路径信息包括泊车路径,上述泊车路径处于以当前车辆的前轴中心点坐标为坐标原点的前轴中心坐标系;坐标变换单元,被配置成对上述泊车路径信息中的泊车路径进行坐标变换,得到变换后泊车路径信息,其中,上述变换后泊车路径信息包括变换后泊车路径,上述变换后泊车路径处于以当前车辆的后轴中心点坐标为坐标原点的后轴中心坐标系;生成单元,被配置成基于上述当前车辆泊车信息和上述变换后泊车路径信息,生成横向误差信息;调整单元,被配置成基于预先构建的倒车横向动力学模型,对上述倒车横向控制信息进行调整,得到调整后倒车横向控制信息;发送以及控制单元,被配置成将上述调整后倒车横向控制信息发送至车辆控制终端以供进行车辆横向控制。
5、第三方面,本公开的一些实施例提供了一种电子设备,包括:一个或多个处理器;存储装置,其上存储有一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现上述第一方面任一实现方式所描述的方法。
6、第四方面,本公开的一些实施例提供了一种计算机可读介质,其上存储有计算机程序,其中,程序被处理器执行时实现上述第一方面任一实现方式所描述的方法。
7、本公开的上述各个实施例具有如下有益效果:通过本公开的一些实施例的车辆泊车横向控制方法,可以减少计算资源的占用。具体来说,造成增大了计算资源的占用的原因在于:需要针对不同的控制器设定对应的参数,同时在优化时也需要同步调整,由此,导致增加了控制的复杂程度和优化调整的难度。基于此,本公开的一些实施例的车辆泊车横向控制方法,首先,获取泊车路径信息和当前车辆泊车信息。其中,上述泊车路径信息包括泊车路径,上述泊车路径处于以当前车辆的前轴中心点坐标为坐标原点的前轴中心坐标系。然后,对上述泊车路径信息中的泊车路径进行坐标变换,得到变换后泊车路径信息。其中,上述变换后泊车路径信息包括变换后泊车路径,上述变换后泊车路径处于以当前车辆的后轴中心点坐标为坐标原点的后轴中心坐标系。通过坐标变换,可以将泊车路径从前轴中心坐标系转换至后轴中心坐标系,以供减少车辆泊车横向控制的初始误差,提高泊车横向控制的准确度。接着,基于上述当前车辆泊车信息和上述变换后泊车路径信息,生成横向误差信息。通过生成横向误差信息,可以便于对误差进行消除。最后,基于预先构建的倒车横向动力学模型,对上述倒车横向控制信息进行调整,得到调整后倒车横向控制信息。通过调整,可以极大的消除横向误差,由此提高调整后倒车横向控制信息的准确度。最后,将上述调整后倒车横向控制信息发送至车辆控制终端以供进行车辆横向控制。从而,可以无需将泊车轨迹拆分为直线轨迹和圆弧轨迹的多段轨迹,也无需设定控制器,即可在提高泊车横向控制准确度的同时,减少计算资源的占用。
技术特征:
1.一种车辆泊车横向控制方法,包括:
2.根据权利要求1所述的方法,其中,所述泊车路径包括路径坐标序列;以及
3.根据权利要求2所述的方法,其中,所述变换后泊车路径信息还包括与变换后路径坐标序列中每个转换后路径坐标对应的期望速度值、期望航向角、期望横摆角、期望横摆角速度和期望横摆角加速度;以及
4.根据权利要求3所述的方法,其中,所述当前车辆泊车信息包括:当前车辆位置坐标、前轮转角度、车辆纵向速度值、车辆横向速度值、车辆横摆角、车辆横摆角速度、前悬质心距离值、后悬质心距离值、当前车辆重量值、横摆角加速度、转动惯量、前轮侧偏刚度值和后轮侧偏刚度值;以及
5.根据权利要求4所述的方法,其中,所述基于所述预瞄点坐标、所述变换后泊车路径信息中与所述当前车辆位置坐标对应的转换后路径坐标对应的期望速度值和期望航向角,生成横向位置偏差值、横向速度偏差值、航向角偏差值和航向角速率偏差值,包括:
6.一种车辆泊车横向控制装置,包括:
7.一种电子设备,包括:
8.一种计算机可读介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现如权利要求1-5中任一所述的方法。
技术总结
本公开的实施例公开了车辆泊车横向控制方法、装置、设备和计算机可读介质。该方法的一具体实施方式包括:获取泊车路径信息和当前车辆泊车信息;对上述泊车路径信息中的泊车路径进行坐标变换,得到变换后泊车路径信息;基于上述当前车辆泊车信息和上述变换后泊车路径信息,生成横向误差信息;基于预先构建的倒车横向动力学模型,对上述倒车横向控制信息进行调整,得到调整后倒车横向控制信息;将上述调整后倒车横向控制信息发送至车辆控制终端以供进行车辆横向控制。该实施方式可以在提高泊车横向控制准确度的同时,减少计算资源的占用。
技术研发人员:许浩,宋汉辰
受保护的技术使用者:禾多科技(北京)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!