拖车模式的控制方法、控制装置及车辆与流程
本发明涉及拖车控制的,具体而言,涉及一种拖车模式的控制方法、控制装置及车辆。
背景技术:
1、电动汽车因故障需要拖车回4s店进行维修时,需将挡位挂n挡,同时保证电子驻车制动系统(epb)不被夹紧,一般通过长按epb实体按键释放开关保证不触发。
2、在电动汽车取消epb实体开关后,无法通过整车下电时长按epb释放按钮保证epb下电自夹不被触发和入p自夹功能被触发,一般通过在中控单元(ivi)里面设置拖车模式按键来保证车辆下电时epb不会被夹紧。
3、在使用拖车模式,不能获知拖车模式是否正常,故存在车辆被拖坏的风险,针对该问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种拖车模式的控制方法、控制装置及车辆,以至少解决在使用拖车模式时,不能获知拖车模式是否正常的技术问题。
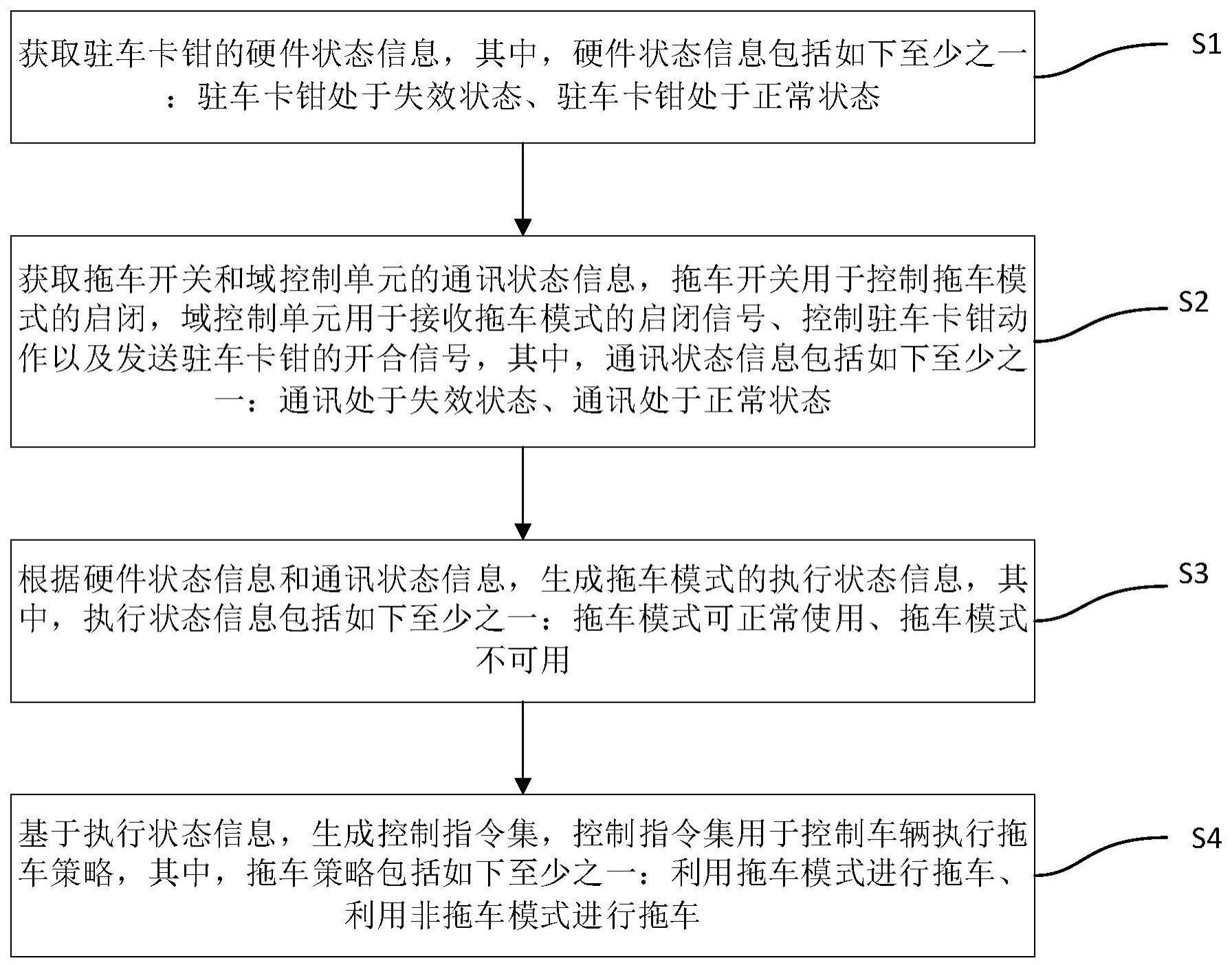
2、根据本发明实施例的一个方面,提供了一种拖车模式的控制方法,包括:获取驻车卡钳的硬件状态信息,其中,硬件状态信息包括如下至少之一:驻车卡钳处于失效状态、驻车卡钳处于正常状态;获取拖车开关和域控制单元的通讯状态信息,拖车开关用于控制拖车模式的启闭,域控制单元用于接收拖车模式的启闭信号、控制驻车卡钳动作以及发送驻车卡钳的开合信号,其中,通讯状态信息包括如下至少之一:通讯处于失效状态、通讯处于正常状态;根据硬件状态信息和通讯状态信息,生成拖车模式的执行状态信息,其中,执行状态信息包括如下至少之一:拖车模式可正常使用、拖车模式不可用;基于执行状态信息,生成控制指令集,控制指令集用于控制车辆执行拖车策略,其中,拖车策略包括如下至少之一:利用拖车模式进行拖车、利用非拖车模式进行拖车。
3、可选地,基于执行状态信息,生成控制指令集,控制指令集用于控制车辆执行拖车策略,包括:在驻车卡钳处于正常状态、拖车开关的通讯处于正常状态且域控制单元的通讯处于正常状态的情况下,生成控制指令集中的第一目标指令,第一目标指令用于控制车辆利用拖车模式进行拖车。
4、可选地,基于执行状态信息,生成控制指令集,控制指令集用于控制车辆执行拖车策略,还包括:在驻车卡钳处于失效状态、拖车开关的通讯处于失效状态和域控制单元的通讯处于失效状态三者出现至少之一的情况下,生成控制指令集中的第二目标指令,第二目标指令用于控制车辆利用非拖车模式进行拖车。
5、可选地,获取域控制单元的通讯状态信息,包括:获取第一域控制器的通讯状态信息,第一域控制器用于接收拖车模式的启闭信号、控制左侧驻车卡钳动作以及发送左侧驻车卡钳的开合信号;获取第二域控制器的通讯状态信息,第二域控制器用于结构拖车模式的启闭信号、控制右侧驻车卡钳动作以及发送右侧驻车卡钳的开合信号。
6、可选地,获取域控制单元的通讯状态信息,还包括:第一域控制器接收左侧驻车卡钳的开合信号后,同步发送左侧驻车卡钳的开合信号和右侧驻车卡钳的开合信号。
7、可选地,控制方法还包括:拖车模式处于开启状态下,当域控制单元接收到车辆挂入p挡位的信号后,电子驻车制动系统控制驻车卡钳夹紧。
8、可选地,在车辆的每个点火循环的开始时刻,拖车开关处于关闭状态,电子驻车制动系统的下电自夹功能处于开启状态。
9、根据本发明实施例的另一方面,还提供了一种拖车模式的控制装置,包括:第一获取模块,第一获取模块用于获取驻车卡钳的硬件状态信息,其中,硬件状态信息包括如下至少之一:驻车卡钳处于失效状态、驻车卡钳处于正常状态;第二获取模块,第二获取模块用于获取拖车开关和域控制单元的通讯状态信息,拖车开关用于控制拖车模式的启闭,域控制单元用于接收拖车模式的启闭信号、控制驻车卡钳动作以及发送驻车卡钳的开合信号,其中,通讯状态信息包括如下至少之一:通讯处于失效状态、通讯处于正常状态;第一生成模块,第一生成模块用于根据硬件状态信息和通讯状态信息,生成拖车模式的执行状态信息,其中,执行状态信息包括如下至少之一:拖车模式可正常使用、拖车模式不可用;第二生成模块,第二生成模块用于基于执行状态信息,生成控制指令集,控制指令集用于控制车辆执行拖车策略,其中,拖车策略包括如下至少之一:利用拖车模式进行拖车、利用非拖车模式进行拖车。
10、根据本发明实施例的另一方面,还提供了一种处理器,处理器用于运行程序,处理器被设置为运行计算机程序以执行上述的控制方法。
11、根据本发明实施例的另一方面,还提供了一种车辆,包括拖车模式,拖车模式是根据上述的控制方法进行控制的。
12、在本发明实施例中,结合驻车卡钳的硬件状态信息、拖车开关的通讯状态信息以及域控制单元的通讯状态信息来判断拖车模式是否可正常使用,基于拖车模式的能否正常使用,执行相对应的拖车策略。上述拖车模式的控制方法,执行拖车动作之前,先对拖车模式进行判断以获知拖车模式是否正常,以避免在拖车模式故障的情况下利用拖车模式进行拖车动作,而导致车辆损坏。
技术特征:
1.一种拖车模式的控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,基于所述执行状态信息,生成控制指令集,所述控制指令集用于控制车辆执行拖车策略,包括:
3.根据权利要求1所述的控制方法,其特征在于,基于所述执行状态信息,生成控制指令集,所述控制指令集用于控制车辆执行拖车策略,还包括:
4.根据权利要求1所述的控制方法,其特征在于,获取所述域控制单元的通讯状态信息,包括:
5.根据权利要求4所述的控制方法,其特征在于,获取所述域控制单元的通讯状态信息,还包括:
6.根据权利要求1所述的控制方法,其特征在于,所述控制方法还包括:
7.根据权利要求1所述的控制方法,其特征在于,在所述车辆的每个点火循环的开始时刻,所述拖车开关处于关闭状态,电子驻车制动系统的下电自夹功能处于开启状态。
8.一种拖车模式的控制装置,其特征在于,包括:
9.一种处理器,其特征在于,所述处理器用于运行程序,所述处理器被设置为运行计算机程序以执行所述权利要求1-7中任一项所述的控制方法。
10.一种车辆,包括拖车模式,其特征在于,所述拖车模式是根据权利要求1-7中任一项所述的控制方法进行控制的。
技术总结
本发明公开了一种拖车模式的控制方法、控制装置及车辆。其中,该方法包括:包括:获取驻车卡钳的硬件状态信息;获取拖车开关和域控制单元的通讯状态信息,拖车开关用于控制拖车模式的启闭,域控制单元用于接收拖车模式的启闭信号、控制驻车卡钳动作以及发送驻车卡钳的开合信号;根据硬件状态信息和通讯状态信息,生成拖车模式的执行状态信息;基于执行状态信息,生成控制指令集,控制指令集用于控制车辆执行拖车策略,其中,拖车策略包括如下至少之一:利用拖车模式进行拖车、利用非拖车模式进行拖车。本发明解决了在使用拖车模式时,不能获知拖车模式是否正常的技术问题。
技术研发人员:闫鲁平,谭宇皓,官浩,隋清海,郝占武,陈志刚,侯杰
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!