车辆控制方法、装置、车辆及计算机可读存储介质与流程
本申请涉及计算机,具体涉及一种车辆控制方法、装置、车辆及计算机可读存储介质。
背景技术:
1、随着自动驾驶技术的发展,自动驾驶技术已经广泛应用于车辆中。其中,自动驾驶技术可以结合环境感知信息来引导车辆进行行驶。例如,在车辆行驶时遇到其它车辆时,可以通过实时环境感知信息执行让行策略,以控制车辆让行其它车辆,确保行车安全。
2、虽然车辆可以通过环境感知信息识别到其它车辆并让行,但在某些行车过程中,过度让车反而会让自车陷入更加危险的境地,降低了车辆的通行效率。
技术实现思路
1、本申请实施例提供一种车辆控制方法、装置、车辆及计算机可读存储介质,可提高车辆的通行效率。
2、本申请实施例提供一种车辆控制方法,包括:
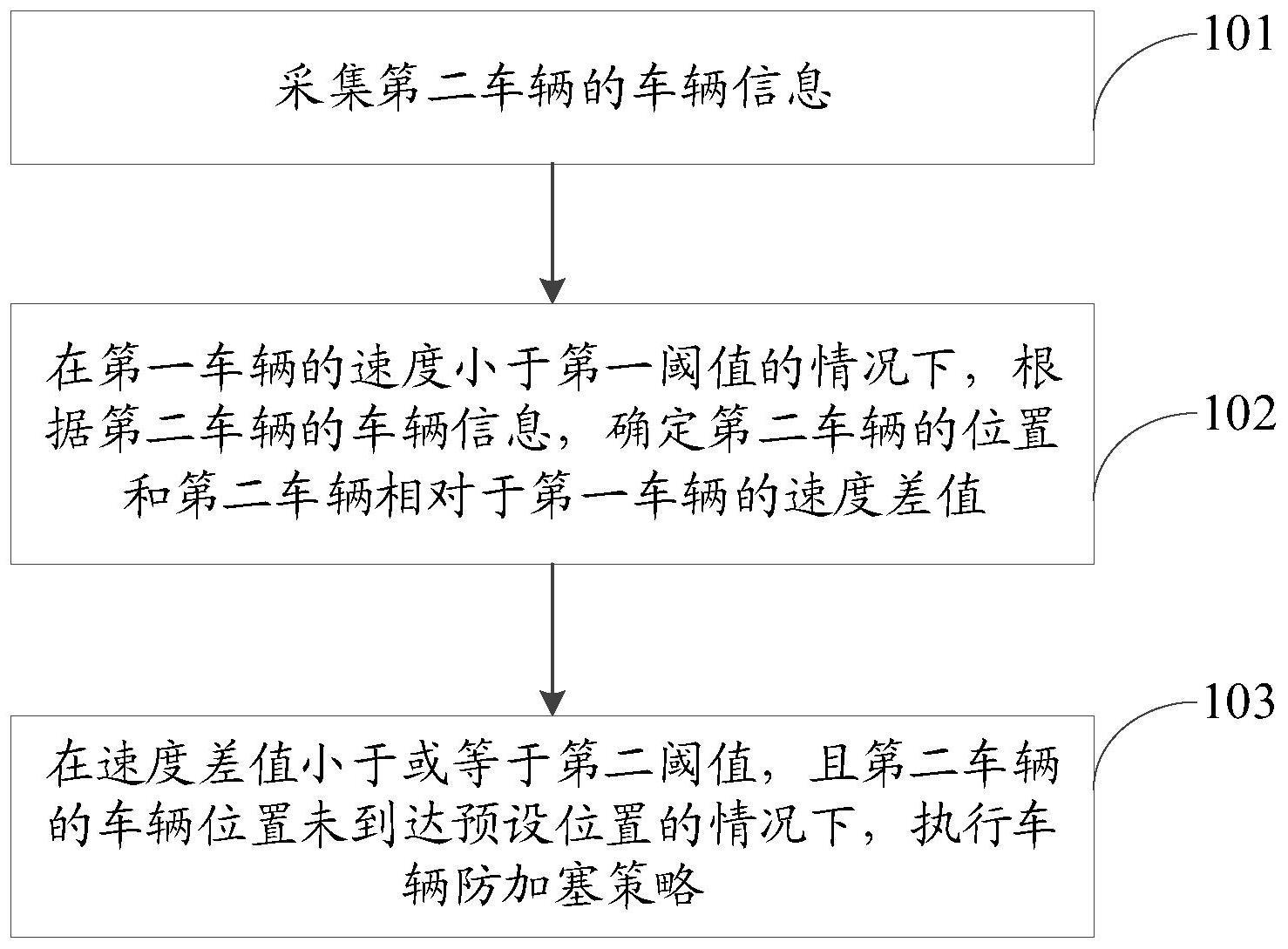
3、采集第二车辆的车辆信息,所述第二车辆为处于与所述第一车辆所在车道相邻的车道且处于预设距离范围内的任一车辆;
4、在所述第一车辆的速度小于第一阈值的情况下,根据所述第二车辆的车辆信息,确定所述第二车辆的位置和所述第二车辆相对于所述第一车辆的速度差值;
5、在所述速度差值小于或等于第二阈值,且所述第二车辆的车辆位置未到达预设位置的情况下,执行车辆防加塞策略。
6、相应的,本申请实施例公开一种车辆控制装置,包括:
7、采集单元,用于采集第二车辆的车辆信息,所述第二车辆为处于与所述第一车辆所在车道相邻的车道且处于预设距离范围内的任一车辆;
8、确定单元,用于在所述第一车辆的速度小于第一阈值的情况下,根据所述第二车辆的车辆信息,确定所述第二车辆的位置和所述第二车辆相对于所述第一车辆的速度差值;
9、执行单元,用于在所述速度差值小于或等于第二阈值,且所述第二车辆的车辆位置未到达预设位置的情况下,执行车辆防加塞策略。
10、在一些实施例中,所述执行单元具体用于:
11、在所述第二车辆无确切性切入意图的情况下,执行车辆防加塞策略。
12、在一些实施例中,所述执行单元具体还用于:
13、在所述第二车辆有确切性切入意图的情况下,根据所述第二车辆的车辆信息,确定所述第一车辆与所述第二车辆之间的最小横向距离;
14、根据所述最小横向距离,确定所述第一车辆的车头与所述第二车辆的车头之间的第一夹角阈值;
15、根据所述最小横向距离和所述第一夹角阈值,执行车辆防加塞策略。
16、在一些实施例中,所述执行单元具体用于:
17、确定所述第一车辆的车头与所述第二车辆的车头之间的夹角;
18、在所述夹角小于所述第一夹角阈值,且所述最小横向距离大于预设横向距离的情况下,执行车辆防加塞策略。
19、在一些实施例中,所述执行单元具体用于:
20、确定所述第一车辆与所述第二车辆之间的最小直线距离;
21、根据所述第二车辆的车辆信息,确定所述第一车辆与所述第二车辆之间的位置分布关系;
22、根据所述最小直线距离与所述位置分布关系,确定所述第一车辆与所述第二车辆之间的最小横向距离。
23、在一些实施例中,所述执行单元具体用于:
24、根据横向距离与夹角阈值之间的关联关系,确定所述最小横向距离对应的第一夹角阈值。
25、在一些实施例中,所述确定单元,还用于根据所述第二车辆的车辆信息,确定所述第二车辆的车辆类型;
26、所述执行单元,还用于在所述第二车辆的车辆类型为特种车辆类型的情况下,执行车辆让行策略;
27、所述确定单元,具体用于在所述第二车辆的车辆类型不是所述特种车辆类型,且所述第一车辆的速度小于第一阈值的情况下,根据所述第二车辆的车辆信息,确定所述第二车辆的位置和所述第二车辆相对于所述第一车辆的速度差值。
28、此外,本申请实施例还提供一种车辆,包括处理器和存储器,存储器存储有计算机程序,处理器用于运行存储器内的计算机程序实现本申请实施例提供的车辆控制方法中的步骤。
29、此外,本申请实施例还提供一种计算机可读存储介质,计算机可读存储介质存储有多条指令,指令适于处理器进行加载,以执行本申请实施例所提供的任一种车辆控制方法中的步骤。
30、此外,本申请实施例还提供一种计算机程序产品,计算机程序产品包括计算机指令,计算机指令存储在计算机可读存储介质中。车辆的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该车辆执行本申请实施例所提供的任一种车辆控制方法中的步骤。
31、本申请实施例采集第二车辆的车辆信息,第二车辆为处于与第一车辆所在车道相邻的车道且处于预设距离范围内的任一车辆;在第一车辆的速度小于第一阈值的情况下,根据第二车辆的车辆信息,确定第二车辆的位置和第二车辆相对于第一车辆的速度差值;在速度差值小于或等于第二阈值,且第二车辆的车辆位置未到达预设位置的情况下,执行车辆防加塞策略。由此可得,本方案可先采集第一车辆所在车道的相邻车道上的第二车辆的车辆信息,通过该车辆信息,进行车辆状态分析,帮助第一车辆安全地执行车辆防加塞策略,以此可以提高第一车辆的行车效率和行车舒适度,保证车辆行驶安全。
技术特征:
1.一种车辆控制方法,其特征在于,应用于第一车辆,包括:
2.根据权利要求1所述的方法,其特征在于,所述执行车辆防加塞策略,包括:
3.根据权利要求2所述的方法,其特征在于,所述执行车辆防加塞策略,还包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述最小横向距离和所述第一夹角阈值,执行车辆防加塞策略,包括:
5.根据权利要求3所述的方法,其特征在于,所述根据所述第二车辆的车辆信息,确定所述第一车辆与所述第二车辆之间的最小横向距离,包括:
6.根据权利要求3所述的方法,其特征在于,所述根据所述最小横向距离,确定所述第一车辆的车头与所述第二车辆的车头之间的第一夹角阈值,包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,所述方法还包括:
8.一种车辆控制装置,其特征在于,包括:
9.一种车辆,其特征在于,包括处理器和存储器,所述存储器存储有计算机程序,所述处理器用于运行所述存储器内的计算机程序实现权利要求1至7任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质为计算机可读并存储有多条指令,所述指令适于处理器进行加载,以执行权利要求1至7任一项所述的车辆控制方法中的步骤。
技术总结
本申请公开了一种车辆控制方法、装置、车辆及计算机可读存储介质;具体的,采集第二车辆的车辆信息,第二车辆为处于与第一车辆所在车道相邻的车道且处于预设距离范围内的任一车辆;在第一车辆的速度小于第一阈值的情况下,根据第二车辆的车辆信息,确定第二车辆的位置和第二车辆相对于第一车辆的速度差值;在速度差值小于或等于第二阈值,且第二车辆的车辆位置未到达预设位置的情况下,执行车辆防加塞策略。由此可得,本方案可先采集第一车辆所在车道的相邻车道上的第二车辆的车辆信息,通过该车辆信息,进行车辆状态分析,帮助第一车辆安全地执行车辆防加塞策略,以此可以提高第一车辆的行车效率和行车舒适度,保证车辆行驶安全。
技术研发人员:黄熠文,李力耘
受保护的技术使用者:广州小鹏自动驾驶科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!