一种泊车路径规划方法,泊车方法和装置与流程
本申请涉及驾驶辅助,特别涉及一种泊车路径规划方法,泊车方法和装置。
背景技术:
1、近年来,随着汽车智能化的发展,自动驾驶域控制器也被广泛应用,其中apa(自动泊车)技术也在不断的迭代发展。
2、目前的apa算法主要还停留在泊车功能的实现方面,该算法在遇到较窄的道路时,一方面需要车辆驶到离目标车位较远的距离才能执行泊车,后续车辆如果紧跟的话,会造成自动泊车距离不够,从而泊车失败,另一方面,由于道路宽度较窄,自动泊车过程中需要频繁进行倒车档和前进档的切换,调整车辆方向,才能泊车成功。
3、针对道路宽度较窄的路面,需要较长的倒车距离(与目标车位间)来回调整车辆方位驶入待泊入车位,容易造成后方车辆误判跟车导致车辆泊车距离不够,无法泊车到目标车位;而且泊车过程中需要通过倒车档与前进档多次切换来调整车辆方向,用时较长,容易引起后方车辆的抱怨或者拥堵。
技术实现思路
1、本申请为解决上述技术问题,提供一种泊车路径规划方法,泊车方法和装置。
2、具体的,本申请提供一种泊车路径规划方法,包括以下步骤:
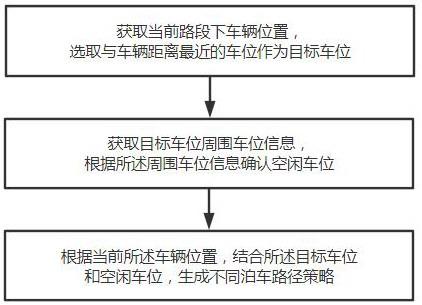
3、获取当前路段下车辆位置,选取与车辆距离最近的车位作为目标车位;
4、获取目标车位周围车位信息,根据所述周围车位信息确认空闲车位;
5、根据当前所述车辆位置,结合所述目标车位和空闲车位,生成不同泊车路径策略。
6、本申请通过所述车辆位置,选定所述目标车位和判断所述周围车位信息,规划不同的泊车路径,可以减少泊车过程中调整车辆方向所需的来回切换倒车档和前进档次数,进一步提高了泊入目标车位的效率。
7、所述选取与车辆距离最近的车位作为目标车位,具体为:
8、根据当前所述车辆位置,获取车辆周围的地图信息,在所述地图信息中以所述车辆位置为中心,对预设范围内车位信息进行扫描,获取与本车距离最近的车位作为目标车位,所述目标车位为本车的待泊车位。
9、上述方法可以准确高效选取目标车位,以保证后续车辆的泊入。
10、所述根据所述周围车位信息确认空闲车位,具体为:
11、获取所述车位信息的扫描结果,提取所述目标车位预设范围内的空闲车位,将所述空闲车位按所述目标车位的不同方位进行区域划分,获得第一空闲车位,第二空闲车位和第三空闲车位;
12、所述第一空闲车位为基于所述目标车位的相向车位;
13、所述第二空闲车位为朝向所述车辆车头方向的位于所述目标车位距离最近的斜对向车位;
14、所述第三空闲车位为朝向所述车辆车头方向的位于所述目标车位距离最近的相邻车位。
15、通过上述方法可以获取所述目标车位周围的空闲车位信息,并进一步划分空闲车位优先度,以实现泊车路径规划。
16、所述根据所述当前车辆位置,结合所述目标车位和空闲车位,生成不同泊车路径策略,包括:当所述第一空闲车位未停放车辆时,调整目标车位侧向的车身与车道线对齐,车头与目标车位近端车位线对齐,调整车头往第一空闲车位方向,使靠近第一空闲车位侧的车身与第一空闲车位近端车位线平齐时停车,切换倒车档,调整车身接近垂直方向角度,切换前进档,调整方向盘方向确保车身与水平方向的角度不超过一预设角度,最后切换倒车档,将车辆停进目标车位,完成目标车位自动泊车。
17、所述根据所述当前车辆位置,结合所述目标车位和空闲车位,生成不同泊车路径策略,还包括:
18、当所述第三空闲车位未停放车辆时,调整车身中线位置到目标车位近端车位线,将车辆往目标车位方向前进,当车身位置与水平方向角度成第二倾斜角度时,继续前进直至车身与水平角度成第三倾斜角度,切换倒车挡,以车身与水平方向的第二倾斜角度进行倒车,直至车身达到目标车位的车位宽度的一预设比例处,切换前进档,使车身与水平方向垂直,最后切换倒车档将车停进目标车位,完成目标车位自动泊车。
19、所述不同的泊车路径规划根据空闲车位信息执行对应的泊车路径策略。
20、基于上述技术,本申请还提出一种泊车方法,所述泊车方法包括:
21、车辆沿当前车道驶至目标车位外第一位置;所述车道宽度小于车身一预设比例;
22、获取所述目标车位周围车位信息,检测空闲车位;
23、根据所述第一位置,结合所述空闲车位和目标车位,采用如上所述的泊车路径规划方法获得不同泊车路径策略,从所述泊车路径策略中选择最优泊车路径完成本次泊车。
24、所述车辆沿当前车道驶至目标车位外第一位置,包括:
25、获取障碍物信息,所述障碍物信息用于指示所述目标车位、所述第一位置和所述空闲车位;
26、根据所述当前路段下本车位置和所述障碍物信息,行驶至所述第一位置。
27、所述根据所述第一位置,结合所述空闲车位和目标车位,采用如上所述的泊车路径规划方法获得不同泊车路径策略,从所述泊车路径策略中选择最优泊车路径完成本次泊车,包括:
28、对所述空闲车位进行个性化识别,得到所述第一空闲车位、第二空闲车位和第三空闲车位的车位空闲信息,根据所述车位空闲信息利用所述泊车路径策略,控制车辆执行从所述第一位置驶入所述目标车位的最优泊车路径策略。
29、所述个性化识别可以根据空闲车位信息的优先度获取所述第一空闲车位、第二空闲车位和第三空闲车位的车位空闲信息。
30、基于上述技术,本申请还提供一种自动泊车装置,包括:
31、获取模块,用于获取当前路段下本车位置信息、障碍物信息和目标车位周围车位信息。
32、计算模块,用于根据如上所述的泊车路径规划方法以生成不同泊车路径策略。
33、所述计算模块,可以准确计算出驾驶员泊车过程中需要调整的方向盘的方向和角度,并根据计算好的方向盘的旋转方向和旋转角度给予驾驶员相应的泊车提示,辅助驾驶员完成泊车动作。
34、控制模块,所述控制模块用于控制所述车辆沿当前车道行驶至所述第一位置,以及控制所述车辆从所述第一位置驶入所述目标车位。
35、与现有技术相比,本申请的有益效果在于:
36、本申请通过预先获取车位情况规划最高效的泊车路径,根据所述第一位置、空闲车位和目标车位从所述泊车路径中选择窄车道下的最优泊车路径完成泊车,可以减少车辆在窄车道下泊车过程中所需车道距离和车辆方向调整次数。解决了现有技术因窄车道下所需泊车车道距离过长导致后车误判跟车,及减少了泊车过程中倒车档与前进档切换次数来调整车辆方向,提高泊入目标车位的效率。
技术特征:
1.一种泊车路径规划方法,其特征在于,
2.根据权利要求1所述一种泊车路径规划方法,其特征在于,所述选取与车辆距离最近的车位作为目标车位,具体为:
3.根据权利要求2所述一种泊车路径规划方法,其特征在于,所述根据所述周围车位信息确认空闲车位,具体为:
4.根据权利要求3所述一种泊车路径规划方法,所述根据所述当前车辆位置,结合所述目标车位和空闲车位,生成不同泊车路径策略,包括:
5.根据权利要求4所述一种泊车路径规划方法,所述根据所述当前车辆位置,结合所述目标车位和空闲车位,生成不同泊车路径策略,还包括:
6.根据权利要求5所述一种泊车路径规划方法,所述根据所述当前车辆位置,结合所述目标车位和空闲车位,生成不同泊车路径策略,还包括:
7.一种泊车方法,其特征在于,
8.根据权利要求7所述的一种泊车方法,其特征在于,所述车辆沿当前车道驶至目标车位外第一位置,包括:
9.根据权利要求8所述的一种泊车方法,其特征在于,所述根据所述第一位置,结合所述空闲车位和目标车位,采用如权利要求1至6任一所述的泊车路径规划方法获得不同泊车路径策略,从所述泊车路径策略中选择最优泊车路径完成本次泊车,包括:
10.一种自动泊车装置,其特征在于,包括:
技术总结
本申请提供一种泊车路径规划方法,泊车方法和装置;所述泊车路径规划方法包括:获取当前路段下车辆位置,选取与车辆距离最近的车位作为目标车位;获取目标车位周围车位信息,根据所述周围车位信息确认空闲车位;根据当前所述车辆位置,结合所述目标车位和空闲车位,生成不同泊车路径策略。所述泊车方法采用所述泊车路径规划方法获取不同泊车路径策略,从所述泊车路径策略中选择最优泊车路径完成泊车。本申请通过预先获取车位情况规划最高效的泊车路径,根据所述第一位置、空闲车位和目标车位从所述泊车路径中选择窄车道下的最优泊车路径完成泊车,可以缩短窄车道泊车过程中,车辆泊入目标车位所需车道距离,有效减少频繁调整车辆方向次数,提高泊车效率。
技术研发人员:顾浩,赵振峰
受保护的技术使用者:惠州市德赛西威汽车电子股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!