电机扭矩控制方法、装置、设备及车辆与流程
本申请涉及车辆,尤其涉及一种电机扭矩控制方法、装置、设备及车辆。
背景技术:
1、随着新能源车辆的发展,车辆上也开始采用各种不同功率、不同转速范畴的驱动电机,受到电驱动桥齿隙和装配间隙的影响,在前驱动桥响应整车扭矩请求反复过零的工况中,由于扭矩方向变化十分迅速,会导致车辆出现抖动,并伴随靠齿敲齿的噪声,严重影响了车辆的舒适性和动力平顺性。
技术实现思路
1、有鉴于此,本申请的目的在于提出一种电机扭矩控制方法、装置、设备及车辆,以改善现有技术中提及的因扭矩方向变化而导致车辆抖动出现敲齿噪声的问题。
2、基于上述目的,本申请提供了一种电机扭矩控制方法,包括:
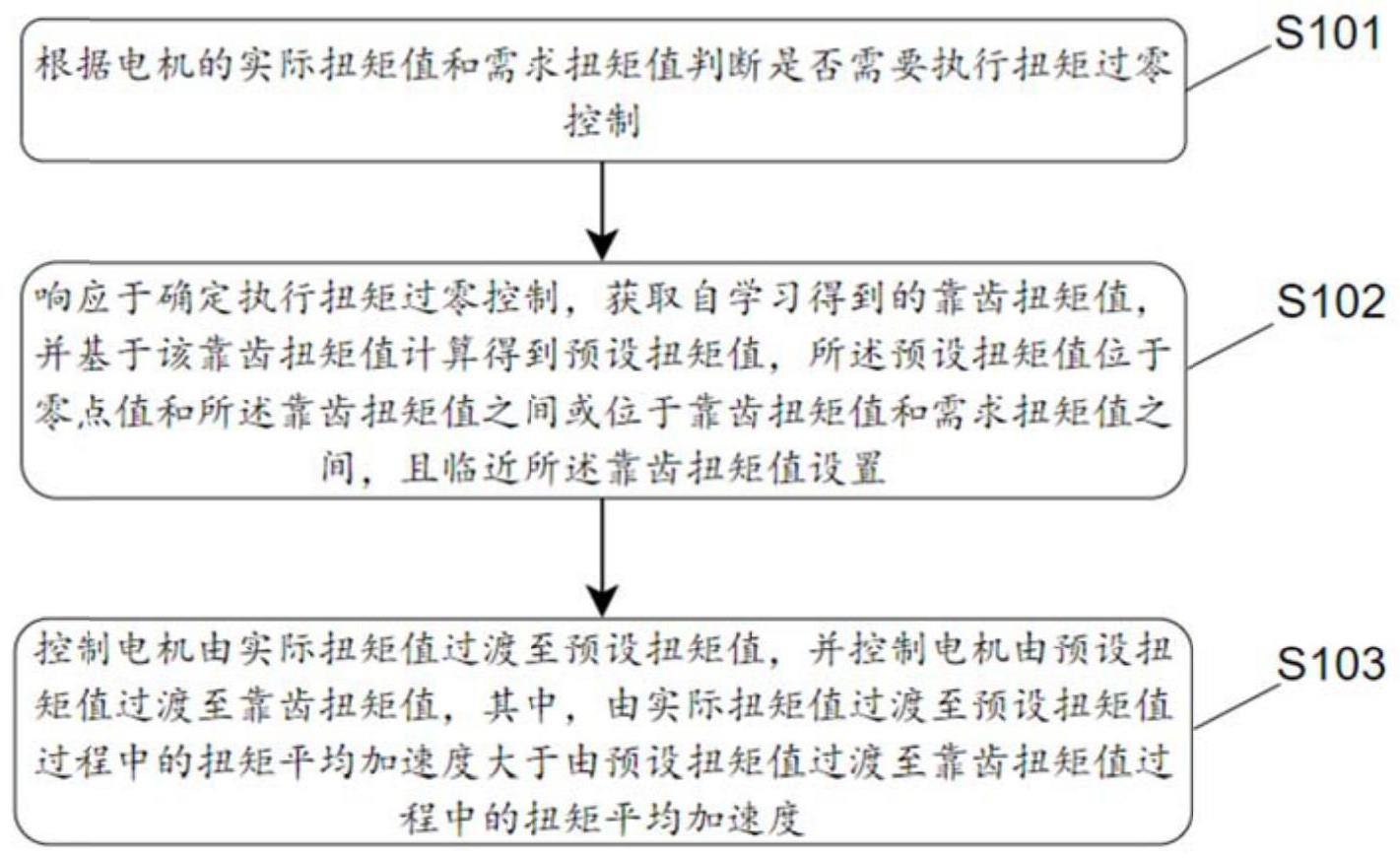
3、根据电机的实际扭矩值和需求扭矩值判断是否需要执行扭矩过零控制;
4、响应于确定执行扭矩过零控制,获取自学习得到的靠齿扭矩值,并基于该靠齿扭矩值计算得到预设扭矩值;所述预设扭矩值位于零点值和所述靠齿扭矩值之间或位于所述靠齿扭矩值和需求扭矩值之间,且所述预设扭矩值临近所述靠齿扭矩值设置;
5、控制电机由实际扭矩值过渡至预设扭矩值,并控制电机由预设扭矩值过渡至靠齿扭矩值,其中,由实际扭矩值过渡至预设扭矩值过程中的扭矩平均加速度大于由预设扭矩值过渡至靠齿扭矩值过程中的扭矩平均加速度。
6、进一步地,所述靠齿扭矩值包括第一靠齿扭矩值和第二靠齿扭矩值,所述自学习得到靠齿扭矩值的过程,包括:
7、判断车辆是否处于无动力状态;
8、响应于确定车辆处于无动力状态,控制电机的实际扭矩值过渡至第一目标扭矩值,通过旋转变压器确定发生靠齿时的第一靠齿扭矩值;
9、控制电机的实际扭矩值由第一目标扭矩值过渡至第二目标扭矩值,通过旋转变压器确定发生靠齿时的第二靠齿扭矩值,其中,第一目标扭矩值和第二目标扭矩值所代表的方向相反。
10、进一步地,所述预设扭矩值包括第一正向扭矩值和第一负向扭矩值;
11、所述基于该靠齿扭矩值计算得到预设扭矩值,包括:
12、将第一靠齿扭矩值和扭矩参考值按照第一计算方式计算得到第一正向扭矩值,并将第二靠齿扭矩值和扭矩参考值按照第二计算方式计算得到第一负向扭矩值。
13、进一步地,所述控制电机由预设扭矩值过渡至靠齿扭矩值,包括:
14、响应于确定扭矩过零方向由负向切换为正向,通过滤波处理使第一正向扭矩值过渡至第一靠齿扭矩值的加速度渐小,直至第一正向扭矩值平滑过渡至第一靠齿扭矩值;
15、响应于确定扭矩过零方向由正向切换为负向,通过滤波处理使第一负向扭矩值过渡至第二靠齿扭矩值的加速度渐小,直至第一负向扭矩值平滑过渡至第二靠齿扭矩值。
16、进一步地,所述预设扭矩值包括第二正向扭矩值和第二负向扭矩值;
17、所述基于该靠齿扭矩值计算得到预设扭矩值,包括:
18、将第一靠齿扭矩值和扭矩参考值按照第三计算方式计算得到第二正向扭矩值,并将第二靠齿扭矩值和扭矩参考值按照第四计算方式计算得到第二负向扭矩值。
19、进一步地,所述控制电机由预设扭矩值过渡至靠齿扭矩值,之后包括:
20、响应于确定扭矩过零方向由负向切换为正向,通过滤波处理使第一靠齿扭矩值过渡至第二正向扭矩值的加速度渐大,直至第一靠齿扭矩值平滑过渡至第二正向扭矩值;
21、响应于确定扭矩过零方向由正向切换为负向,通过滤波处理使第二靠齿扭矩值过渡至第二负向扭矩值的加速度渐大,直至第二靠齿扭矩值平滑过渡至第二负向扭矩值。
22、进一步地,所述通过旋转变压器确定发生靠齿时的第一靠齿扭矩值,包括:
23、通过旋转变压器获取电机的电机械角度,响应于确定电机械角度突变超出预设区间,则将突变的电机械角度对应的扭矩值作为电机的第一靠齿扭矩值;
24、所述通过旋转变压器确定发生靠齿时的第二靠齿扭矩值,包括:
25、通过旋转变压器获取电机的电机械角度,响应于确定电机械角度突变超出预设区间,则将突变的电机械角度对应的扭矩值作为电机的第二靠齿扭矩值。
26、基于同一发明构思,本申请还提供了一种电机扭矩控制装置,包括:
27、判断模块,被配置为根据电机的实际扭矩值和需求扭矩值判断是否需要执行扭矩过零控制;
28、数据获取模块,被配置为响应于确定执行扭矩过零控制,获取自学习得到的靠齿扭矩值,并基于该靠齿扭矩值计算得到预设扭矩值,所述预设扭矩值位于零点值和所述靠齿扭矩值之间或位于所述靠齿扭矩值和需求扭矩值之间,且所述预设扭矩值临近所述靠齿扭矩值设置;
29、执行模块,被配置为控制电机由实际扭矩值过渡至预设扭矩值,并控制电机由预设扭矩值过渡至靠齿扭矩值,其中,由实际扭矩值过渡至预设扭矩值过程中的扭矩平均加速度大于由预设扭矩值过渡至靠齿扭矩值过程中的扭矩平均加速度。
30、基于同一发明构思,本公开还提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现如上所述的方法。
31、基于同一发明构思,本公开还提供了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使计算机执行如上所述的方法。
32、基于同一发明构思,本公开还提供了一种车辆,包括如上所述的电子设备或存储介质。
33、从上面所述可以看出,本申请提供的电机扭矩控制方法,在确定执行扭矩过零控制时,先获取靠齿扭矩值,根据靠齿扭矩值计算得到预设扭矩值,由于预设扭矩值位于零点值和靠齿扭矩值之间,且临近靠齿扭矩值设置,控制电机的实际扭矩值过零点后可以继续按照原有设定扭矩变化速率变化直至预设扭矩值,通过降低从预设扭矩值过渡至靠齿扭矩值平均加速度,达到缓冲靠齿啮合冲击的作用。
34、相比于相关技术中在零点两侧减缓变化速率,本方案能够在更小的扭矩变化范围内过渡至靠齿扭矩值,从而有利于车机更加精确的识别扭矩过零区间,优化过零扭矩响应时间,从而改善或消除车辆冲击抖动现象,提升整车平顺性和舒适性。
技术特征:
1.一种电机扭矩控制方法,其特征在于,包括:
2.根据权利要求1所述的电机扭矩控制方法,其特征在于,所述靠齿扭矩值包括第一靠齿扭矩值和第二靠齿扭矩值,所述自学习得到靠齿扭矩值的过程,包括:
3.根据权利要求2所述的电机扭矩控制方法,其特征在于,所述预设扭矩值包括第一正向扭矩值和第一负向扭矩值;
4.根据权利要求3所述的电机扭矩控制方法,其特征在于,所述控制电机由预设扭矩值过渡至靠齿扭矩值,包括:
5.根据权利要求2所述的电机扭矩控制方法,其特征在于,所述预设扭矩值包括第二正向扭矩值和第二负向扭矩值;
6.根据权利要求5所述的电机扭矩控制方法,其特征在于,所述控制电机由预设扭矩值过渡至靠齿扭矩值,之后包括:
7.根据权利要求2所述的电机扭矩控制方法,其特征在于,所述通过旋转变压器确定发生靠齿时的第一靠齿扭矩值,包括:
8.一种电机扭矩控制装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任意一项所述的方法。
10.一种车辆,其特征在于,包括如权利要求9所述的电子设备。
技术总结
本申请提供一种电机扭矩控制方法、装置、设备及车辆,属于车辆技术领域,所述方法包括根据电机的实际扭矩值和需求扭矩值判断是否需要执行扭矩过零控制;响应于确定执行扭矩过零控制,获取自学习得到的靠齿扭矩值,并基于该靠齿扭矩值计算得到预设扭矩值;控制电机由实际扭矩值过渡至预设扭矩值,并控制电机由预设扭矩值过渡至靠齿扭矩值,由实际扭矩值过渡至预设扭矩值过程中的扭矩平均加速度大于由预设扭矩值过渡至靠齿扭矩值过程中的扭矩平均加速度。本申请提供的电机扭矩控制方法,能够精确标定扭矩过零阶段的靠齿过程,缓冲齿轮啮合过程中的冲击程度,从而改善或消除车辆冲击抖动现象,提升整车平顺性和舒适性。
技术研发人员:张庆祝,骆平原,赵越
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!