一种支持旋翼飞行、轮式移动的多功能机器人底盘
本发明涉及一种支持旋翼飞行、轮式移动的多功能机器人底盘,属于机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、目前常见的单一机器人底盘有轮式、履带式、足式、旋翼飞行式等,单一功能的机器人的使用场景很容易受到限制。轮式机器人具有移动速度快、控制灵活等优势,但在路况较差时则行动困难;履带式机器人移动速度较轮式机器人缓慢,但时能应付多数路况较差的场景,不过遇到较深沟壑、深水、腐蚀、黏着等环境依然受限;足式机器人虽然具有灵活、较快速、等优势,但是控制、结构都相对复杂;旋翼机器人,又称为旋翼无人机,凭借空中飞行的优势,不受路况的限制,但是存在续航不够长,在一些场景中不够隐蔽等问题。所以陆续出现了许多支持旋翼飞行、轮式移动的多功能机器人底盘。
3、目前常见的多功能底盘有:履带和轮的混合式底盘,旋翼和轮的混合式底盘、旋翼和履带的混合式底盘。这些常见的飞、行两用多功能底盘虽然能够实现设计目的,但是大多数为旋翼飞行和地面移动分别采用各自的动力装置提供动力,这样加大了机器人的体积,导致携带不便,因此有必要提供新的支持旋翼飞行、轮式移动的多功能机器人底盘。
技术实现思路
1、本发明提供了一种支持旋翼飞行、轮式移动的多功能机器人底盘,通过巧妙地将中心轴与螺旋桨组件、起落架进行配合,使得机器人底盘具备飞行、轮式两种运动方式。
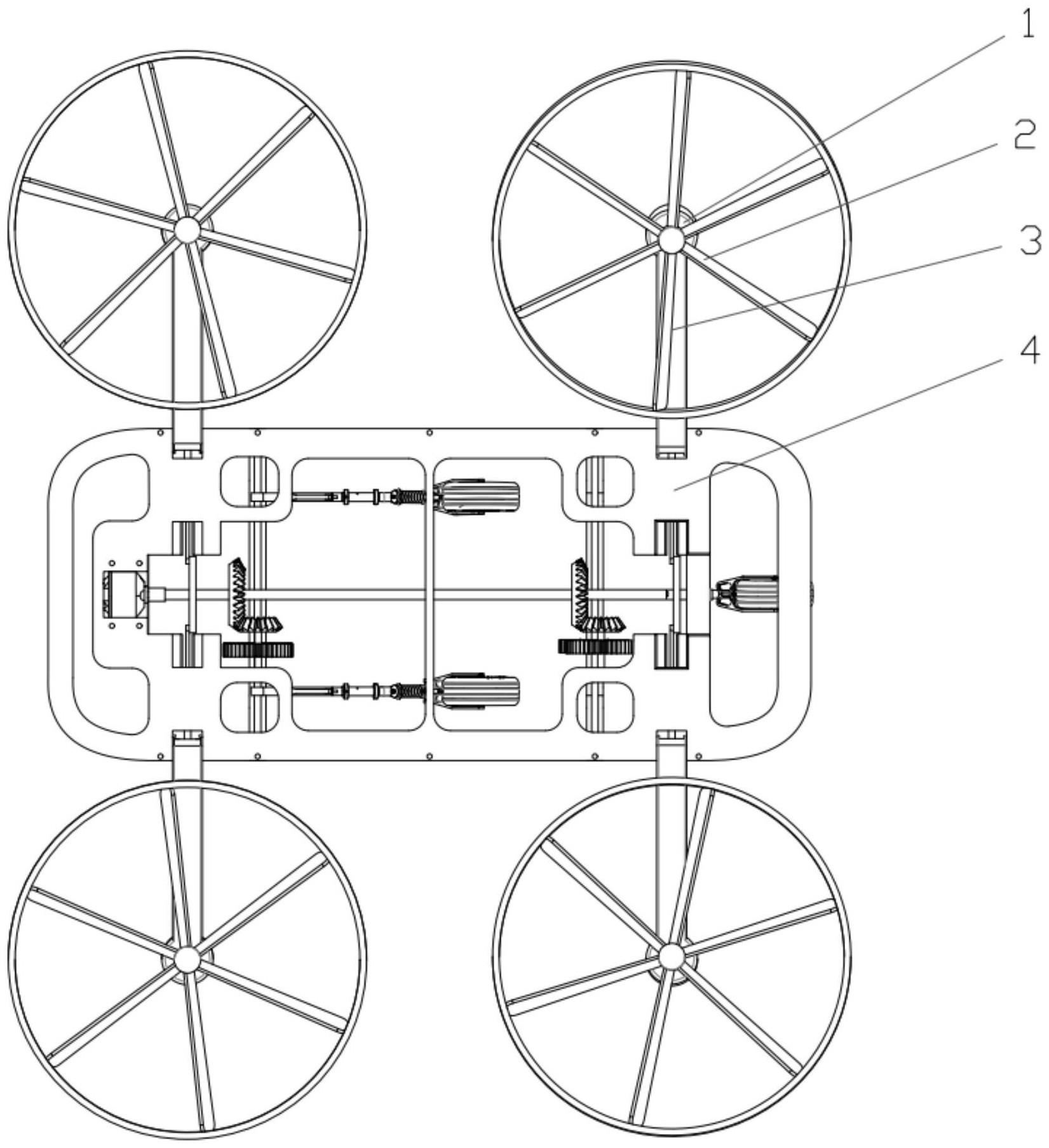
2、本发明的技术方案是:一种支持旋翼飞行、轮式移动的多功能机器人底盘,包括第一动力装置1、底盘板架4、第二动力装置11、中心轴5、螺旋桨组件、起落架;所述螺旋桨组件包括螺旋桨2、螺旋桨臂3和推拉机构;所述起落架包括后轮18、前轮21、第一传动机构、第二传动机构;其中,安装在底盘板架4上的第二动力装置11输出动力至中心轴5;中心轴5上安装第一传动机构、第二传动机构及推拉机构,第一传动机构末端安装后轮18,第二传动机构末端安装前轮21;通过中心轴5带动推拉机构进行推拉运动、带动后轮18跟随第一传动机构及前轮21跟随第二传动机构同步起落,通过推拉机构的推拉运动带动与推拉机构配合的螺旋桨臂3绕底盘板架4转动;螺旋桨臂3末端安装通过第一动力装置1提供动力的螺旋桨2。
3、所述推拉机构包括曲柄盘9及两组螺旋桨臂推拉连杆19、滑轮22、滑轮轴24、滑轮连杆27、第一定位套筒17和第二定位套筒30;其中,曲柄盘9固接在中心轴5上,曲柄盘9上设有两个关于圆心呈中心对称分布的凸柱,曲柄盘9的凸柱分别和一滑轮连杆27一端转动连接,滑轮连杆27另一端、螺旋桨臂推拉连杆19一端与滑轮轴24转动连接,通过两第二定位套筒30将滑轮连杆27另一端、螺旋桨臂推拉连杆19一端整体置于滑轮轴24的中间位置,滑轮轴24两端分别与一滑轮22活动连接,滑轮22能在底盘板架4的滑动槽内移动,螺旋桨臂推拉连杆19另一端和螺旋桨臂3中间位置转轴转动连接且螺旋桨臂推拉连杆19另一端通过两第一定位套筒17置于转轴的中间位置,螺旋桨臂3一端转动连接于底盘板架4左右边缘处,螺旋桨臂3和第一动力装置1固定连接,第一动力装置1输出轴和螺旋桨2固接。
4、所述第一传动机构、第二传动机构均包括从动圆锥齿轮7、主动圆锥齿轮8、支架12、第二轴29、第一圆柱齿轮15、第一轴14、第二圆柱齿轮25、轮架;第一传动机构、第二传动机构的主动圆锥齿轮8固定于中心轴5前后,固接于第二轴29上的从动圆锥齿轮7与主动圆锥齿轮8啮合,第一圆柱齿轮15固接于第二轴29上且位于从动圆锥齿轮7外侧,第一轴14平行于第二轴29转动连接于支架12上,第二圆柱齿轮25固接于第一轴14上;主动圆锥齿轮8和从动圆锥齿轮7相配合传动,从动圆锥齿轮7和第一圆柱齿轮15通过共同固接于第二轴29形成刚体共同运动,第一圆柱齿轮15和第二圆柱齿轮25配合传动,按照主动圆锥齿轮8、从动圆锥齿轮7及第一圆柱齿轮15、第二圆柱齿轮25及第一轴14的传递顺序,将第二动力装置11的动力传递至第一轴14;第一轴14上安装轮架,通过轮架安装轮子。
5、所述第一传动机构的轮架包括两组,对称安装在第一传动机构的第一轴14上,第一传动机构的轮架包括起落架曲柄6、连杆20、减震器26、后轮杆一16、后轮杆二31,其中,起落架曲柄6一端转动连接于第一轴14一侧且位于后轮杆一16的正上方,起落架曲柄6另一端同连杆20一端转动连接,连杆20另一端同后轮杆一16中间位置转动连接,后轮杆一16一端转动连接于支架12一侧,后轮杆一16另一端与后轮杆二31一端转动连接,减震器26一端与后轮杆一16转动连接,减震器26另一端与后轮杆二31中部转动连接,后轮杆二31另一端与后轮18连接。
6、所述第二传动机构的轮架为一组,安装在第二传动机构中第一轴14上,所述第二传动机构的轮架包括起落架曲柄6、连杆20、前轮杆28;其中,起落架曲柄6一端转动连接于第一轴14中间且位于前轮杆28的正上方,起落架曲柄6另一端同连杆20一端转动连接,连杆20另一端同前轮杆28中间位置转动连接,前轮杆28另一端与前轮21连接。
7、本发明的有益效果是:本发明多功能底盘中心线位置安装有伺服减速机,通过联轴器带动中心轴,同时将动力传送到中心圆锥齿轮和曲柄盘,并传向起落架和螺旋桨臂,实现对起落架的起落和螺旋桨组件绕轴上抬和下放的同步控制,进而完成机器人旋翼飞行和轮式移动的形态转换,巧妙实现飞行、轮式一体的目标,一定程度上节省了机器人的收纳空间。
技术特征:
1.一种支持旋翼飞行、轮式移动的多功能机器人底盘,其特征在于,包括第一动力装置(1)、底盘板架(4)、第二动力装置(11)、中心轴(5)、螺旋桨组件、起落架;所述螺旋桨组件包括螺旋桨(2)、螺旋桨臂(3)和推拉机构;所述起落架包括后轮(18)、前轮(21)、第一传动机构、第二传动机构;其中,安装在底盘板架(4)上的第二动力装置(11)输出动力至中心轴(5);中心轴(5)上安装第一传动机构、第二传动机构及推拉机构,第一传动机构末端安装后轮(18),第二传动机构末端安装前轮(21);通过中心轴(5)带动推拉机构进行推拉运动、带动后轮(18)跟随第一传动机构及前轮(21)跟随第二传动机构同步起落,通过推拉机构的推拉运动带动与推拉机构配合的螺旋桨臂(3)绕底盘板架(4)转动;螺旋桨臂(3)末端安装通过第一动力装置(1)提供动力的螺旋桨(2)。
2.根据权利要求1所述的支持旋翼飞行、轮式移动的多功能机器人底盘,其特征在于,所述推拉机构包括曲柄盘(9)及两组螺旋桨臂推拉连杆(19)、滑轮(22)、滑轮轴(24)、滑轮连杆(27)、第一定位套筒(17)和第二定位套筒(30);其中,曲柄盘(9)固接在中心轴(5)上,曲柄盘(9)上设有两个关于圆心呈中心对称分布的凸柱,曲柄盘(9)的凸柱分别和一滑轮连杆(27)一端转动连接,滑轮连杆(27)另一端、螺旋桨臂推拉连杆(19)一端与滑轮轴(24)转动连接,通过两第二定位套筒(30)将滑轮连杆(27)另一端、螺旋桨臂推拉连杆(19)一端整体置于滑轮轴(24)的中间位置,滑轮轴(24)两端分别与一滑轮(22)活动连接,滑轮(22)能在底盘板架(4)的滑动槽内移动,螺旋桨臂推拉连杆(19)另一端和螺旋桨臂(3)中间位置转轴转动连接且螺旋桨臂推拉连杆(19)另一端通过两第一定位套筒(17)置于转轴的中间位置,螺旋桨臂(3)一端转动连接于底盘板架(4)左右边缘处,螺旋桨臂(3)和第一动力装置(1)固定连接,第一动力装置(1)输出轴和螺旋桨(2)固接。
3.根据权利要求1所述的支持旋翼飞行、轮式移动的多功能机器人底盘,其特征在于,所述第一传动机构、第二传动机构均包括从动圆锥齿轮(7)、主动圆锥齿轮(8)、支架(12)、第二轴(29)、第一圆柱齿轮(15)、第一轴(14)、第二圆柱齿轮(25)、轮架;第一传动机构、第二传动机构的主动圆锥齿轮(8)固定于中心轴(5)前后,固接于第二轴(29)上的从动圆锥齿轮(7)与主动圆锥齿轮(8)啮合,第一圆柱齿轮(15)固接于第二轴(29)上且位于从动圆锥齿轮(7)外侧,第一轴(14)平行于第二轴(29)转动连接于支架(12)上,第二圆柱齿轮(25)固接于第一轴(14)上;主动圆锥齿轮(8)和从动圆锥齿轮(7)相配合传动,从动圆锥齿轮(7)和第一圆柱齿轮(15)通过共同固接于第二轴(29)形成刚体共同运动,第一圆柱齿轮(15)和第二圆柱齿轮(25)配合传动,按照主动圆锥齿轮(8)、从动圆锥齿轮(7)及第一圆柱齿轮(15)、第二圆柱齿轮(25)及第一轴(14)的传递顺序,将第二动力装置(11)的动力传递至第一轴(14);第一轴(14)上安装轮架,通过轮架安装轮子。
4.根据权利要求3所述的支持旋翼飞行、轮式移动的多功能机器人底盘,其特征在于,所述第一传动机构的轮架包括两组,对称安装在第一传动机构的第一轴(14)上,第一传动机构的轮架包括起落架曲柄(6)、连杆(20)、减震器(26)、后轮杆一(16)、后轮杆二(31),其中,起落架曲柄(6)一端转动连接于第一轴(14)一侧且位于后轮杆一(16)的正上方,起落架曲柄(6)另一端同连杆(20)一端转动连接,连杆(20)另一端同后轮杆一(16)中间位置转动连接,后轮杆一(16)一端转动连接于支架(12)一侧,后轮杆一(16)另一端与后轮杆二(31)一端转动连接,减震器(26)一端与后轮杆一(16)转动连接,减震器(26)另一端与后轮杆二(31)中部转动连接,后轮杆二(31)另一端与后轮(18)连接。
5.根据权利要求3所述的支持旋翼飞行、轮式移动的多功能机器人底盘,其特征在于,所述第二传动机构的轮架为一组,安装在第二传动机构中第一轴(14)上,所述第二传动机构的轮架包括起落架曲柄(6)、连杆(20)、前轮杆(28);其中,起落架曲柄(6)一端转动连接于第一轴(14)中间且位于前轮杆(28)的正上方,起落架曲柄(6)另一端同连杆(20)一端转动连接,连杆(20)另一端同前轮杆(28)中间位置转动连接,前轮杆(28)另一端与前轮(21)连接。
技术总结
本发明公开了一种支持旋翼飞行、轮式移动的多功能机器人底盘,包括第一动力装置、底盘板架、第二动力装置、中心轴、螺旋桨组件、起落架;螺旋桨组件包括螺旋桨、螺旋桨臂和推拉机构;起落架包括后轮、前轮、第一传动机构、第二传动机构;安装在底盘板架上的第二动力装置输出动力至中心轴;中心轴上安装第一传动机构、第二传动机构及推拉机构,第一传动机构末端安装后轮,第二传动机构末端安装前轮;通过中心轴带动推拉机构进行推拉运动、带动后轮跟随第一传动机构及前轮跟随第二传动机构同步起落,通过推拉机构的推拉运动带动与推拉机构配合的螺旋桨臂绕底盘板架转动;螺旋桨臂末端安装通过第一动力装置提供动力的螺旋桨。本发明巧妙地实现飞行、轮式一体的目标。
技术研发人员:伞红军,张号彬,陈久朋,丁林,赵龙云,孙海杰,姚得鑫,彭真,陈治帆,吴兴梅,杨晓园,冯金祥,董朋林
受保护的技术使用者:昆明理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!