一种基于导轨移动的线驱动柔性臂充电桩系统及使用方法
本发明涉及机械臂领域,具体涉及一种基于导轨移动的线驱动柔性臂充电桩系统及使用方法。
背景技术:
1、中国新能源汽车正在爆发式增长,充电桩建设是行业健康发展的重要保障。然而,充电桩缺乏、利用效率低、智能化差等阻碍了新能源汽车的发展,充电桩问题也日益成为未来发展中研究的重点。目前市场研发的自动充电桩机器人多以搭载三轴刚性臂为充电桩主体,易产生影响路面交通、充电环境要求高、充电效率低等问题。
2、柔性臂具有高度灵活性,能够完成伸长、弯曲以及偏转变形等动作,并可控制末端在相应空间内实现自由运动。使用柔性臂作为充电装置的自对接结构,可以有效改善传统刚性臂的空间占用率大、灵活性低等不足。然而,目前为止还未发现将柔性臂与充电桩结合的较为优秀的案例。因此,有必要对现有的技术进行改进,提供一种基于导轨移动的线驱动柔性臂充电桩系统。
技术实现思路
1、本发明针对现有技术中的不足,提供一种基于导轨移动的线驱动柔性臂充电桩系统及使用方法。针对目前现有的刚性机械臂存在空间占用率大,运动自由度低等缺陷,采用柔性机械臂对充电装置进行改进。该系统充电桩基于导轨移动,柔性臂充电机构由8个舵机控制分别连接在对应片体的8根驱动线及进行驱动控制,利用高精度的控制算法开发出可自充自卸的柔性有序充电控制系统。本发明适用于室内停车场、立体停车场、老旧小区停车场改造、新建商业、住宅停车场等,特别是在人流大,弹性需求高的商业区域。
2、为实现上述目的,本发明采用以下技术方案:
3、一方面,本发明提供一种基于导轨移动的线驱动柔性臂充电桩系统,包括导轨,所述导轨安装在停车场顶棚处,还包括行驶机构、收容舱、升降机构、驱动机构以及充电机构;
4、所述行驶机构与停车场顶棚的导轨活动连接,用于带动收容舱、升降机构、驱动机构和充电机构沿导轨移动;
5、所述收容舱安装在行驶机构底部,用于盛放升降机构、驱动机构以及充电机构;
6、所述升降机构安装在收容舱内,用于控制充电机构的伸出与收回;
7、所述驱动机构用于控制充电机构的姿态和动作;
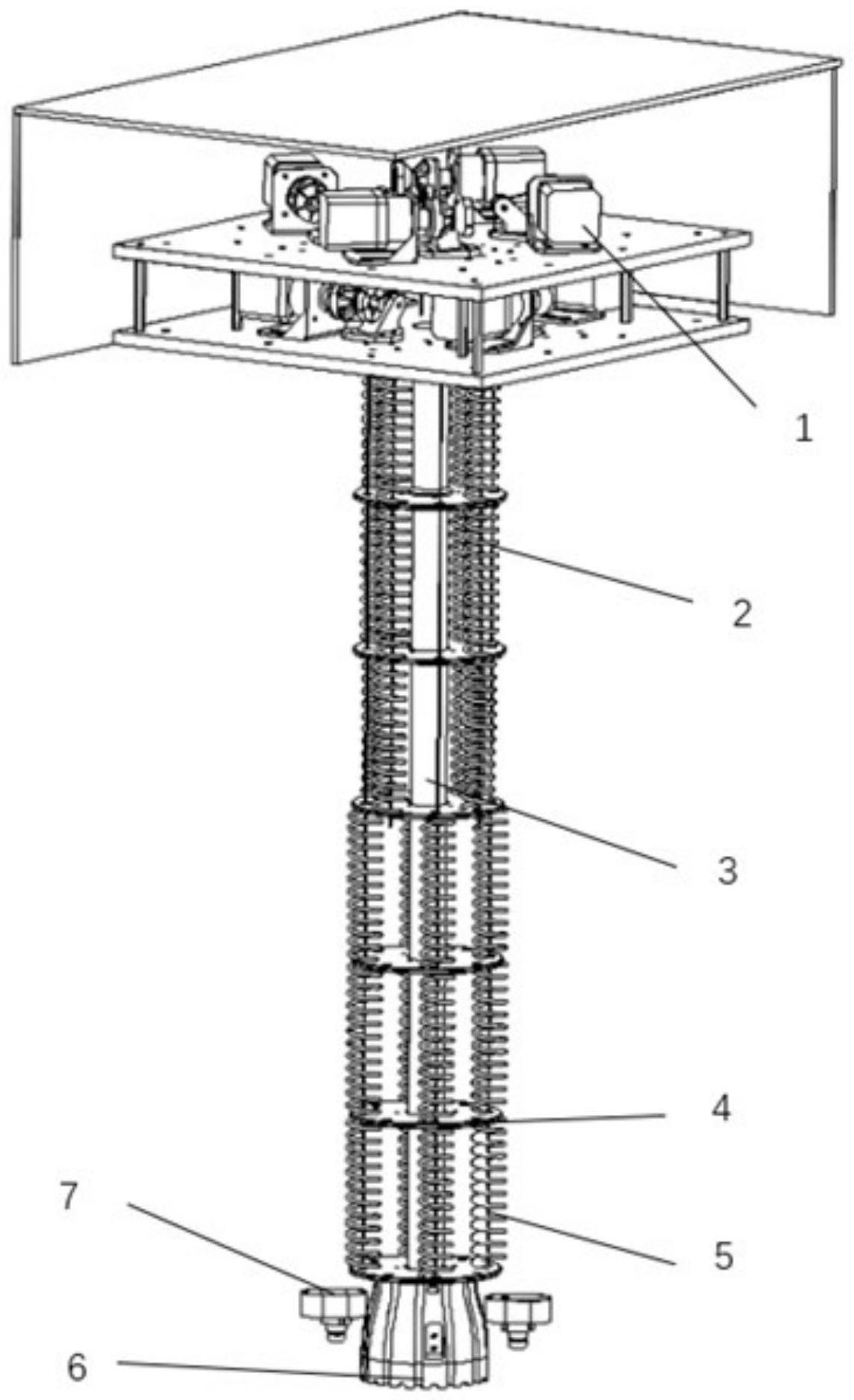
8、所述充电机构包括线驱动柔性臂,所述线驱动柔性臂包括支撑弹簧、气动软管、片体以及驱动线,所述片体上开设有若干孔洞,若干所述片体自上而下依次排列,每块所述片体上均安装有姿态感知器,若干所述驱动线的一端与驱动结构连接,部分驱动线的另一端依次穿过所有片体上间隔的孔洞,并在穿过最底部片体的孔洞后与最底部片体固定连接,剩余驱动线的另一端依次穿过自上而下排列的片体上的剩余孔洞,并在穿过任一非最底部片体上的孔洞后与该片体固定连接,该片体与驱动机构之间所有没有延伸至该片体下方的驱动线外侧均安装有支撑弹簧,该片体与最底部片体之间所有的驱动线外侧也安装有支撑弹簧;所述气动软管的一端和驱动机构连接,另一端贯穿自上而下排列的片体并和最底部的片体固定连接;所述收容舱内安装有若干压力传感器,若干所述驱动线的压力变化由压力传感器监测;最底层片体固定有充电接头,所述充电接头两侧安装有视觉相机。
9、为优化上述技术方案,采取的具体措施还包括:
10、进一步地,所述片体设置有六个,所述片体上均匀开设有八个孔洞,八根驱动线的一端与驱动结构连接,其中四根驱动线的另一端依次穿过所有片体上间隔的孔洞,并在穿过最底部片体的孔洞后与最底部片体固定连接,剩余驱动线的另一端依次穿过自上而下排列的片体上的剩余孔洞,并在穿过中间片体上的孔洞后与该片体固定连接,第三个片体与驱动机构之间所有没有延伸至第三个片体下方的驱动线外侧均安装有支撑弹簧,第三个片体与最底部片体之间所有的驱动线外侧也安装有支撑弹簧。
11、进一步地,所述导轨呈“丰”字型,所述导轨的横向部分设于车位上方,纵向部分沿车位排列方向设置。
12、进一步地,所述行驶机构包括电机、齿轮、车架以及定向轮,两个所述车架固定在收容舱顶部并相对设置,一侧车架上转动连接有转轴,所述齿轮固定在转轴外侧,所述电机安装在另一侧车架的外侧,该侧车架上开设有孔洞,所述电机的输出端穿过孔洞并与齿轮连接,若干个所述定向轮分别安装在两个所述车架的顶部外侧,所述定向轮与导轨内壁底端滑动连接,所述导轨内安装有齿条,所述齿轮与齿条啮合。
13、进一步地,所述升降机构包括电机、丝杆以及移动板,所述移动板设于收容舱内,所述线驱动柔性臂安装在移动板底面,至少两个丝杆贯穿安装于移动板边缘,所述电机驱动丝杆转动,带动移动板上下移动,所述收容舱底部开设有供线驱动柔性臂穿过的封闭舱门。
14、进一步地,所述驱动机构包括驱动电机和绕线机构,所述驱动电机的数量与驱动线匹配,每根所述驱动线绕过绕线机构后与单个驱动电机的输出端相连。
15、进一步地,所述充电接头为电磁吸式接头。
16、另一方面,本发明提供一种基于上述导轨移动的线驱动柔性臂充电桩系统的使用方法,包括以下步骤:
17、用户扫描二维码,选择车辆型号、车位信息后,云端调用空闲的充电桩移动至车位上方;封闭舱门打开,升降机构推动线驱动柔性臂伸出收容舱,视觉相机将拍摄到的画面传输至pc控制端,pc控制端控制驱动电机对驱动线进行收放、对气动软管进行充放气,使得线驱动柔性臂移动至电车的充电口位置,充电接头插入充电口后开始充电;在线驱动柔性臂移动寻找充电口的过程中,压力传感器感知驱动线拉力的变化,姿态感知器获取每片片体的角度变化值,两者数据传输至pc控制端整合后,记录下此次的充电行为;充电完成后,驱动机构收线,使得线驱动柔性臂返回收容舱,封闭舱门关闭,行驶机构将充电桩移回至待机区。
18、本发明的有益效果是:
19、1)本发明将线驱动柔性臂与充电桩结合,提供了一种基于导轨移动的线驱动柔性臂充电桩系统,该充电桩利用视觉相机定位充电口,线驱动柔性臂具有高度灵活性,能够完成伸长、弯曲以及偏转变形等动作,解决了传统刚性臂的空间占用率大、灵活性低等不足的问题;
20、2)本发明中的线驱动柔性臂包含上下两个单元,均由驱动线和气动软管进行控制,两个单元的长度、片体的节数可根据需要,进行仿真验证后进行调节,以适应不同的应用场景;
21、3)用户可以通过简单的手机操作实现电动汽车充电全过程,自动充电桩系统充分利用物联网功能,实现电动汽车全自动化智能充电,电磁式充电接头保证了充电稳定性,同时可便捷地连接与分离,整体充电效率高。
技术特征:
1.一种基于导轨移动的线驱动柔性臂充电桩系统,包括导轨,所述导轨安装在停车场顶棚处,其特征在于,还包括行驶机构、收容舱、升降机构、驱动机构以及充电机构;
2.根据权利要求1所述的一种基于导轨移动的线驱动柔性臂充电桩系统,其特征在于,所述片体(4)设置有六个,所述片体(4)上均匀开设有八个孔洞,八根驱动线(5)的一端与驱动结构连接,其中四根驱动线(5)的另一端依次穿过所有片体(4)上间隔的孔洞,并在穿过最底部片体(4)的孔洞后与最底部片体(4)固定连接,剩余驱动线(5)的另一端依次穿过自上而下排列的片体(4)上的剩余孔洞,并在穿过中间片体(4)上的孔洞后与该片体(4)固定连接,第三个片体(4)与驱动机构之间所有没有延伸至第三个片体(4)下方的驱动线(5)外侧均安装有支撑弹簧(2),第三个片体(4)与最底部片体(4)之间所有的驱动线(5)外侧也安装有支撑弹簧(2)。
3.根据权利要求1所述的一种基于导轨移动的线驱动柔性臂充电桩系统,其特征在于,所述导轨呈“丰”字型,所述导轨的横向部分设于车位上方,纵向部分沿车位排列方向设置。
4.根据权利要求1所述的一种基于导轨移动的线驱动柔性臂充电桩系统,其特征在于,所述行驶机构包括电机、齿轮(9)、车架(10)以及定向轮(11),两个所述车架(10)固定在收容舱顶部并相对设置,一侧车架(10)上转动连接有转轴,所述齿轮(9)固定在转轴外侧,所述电机安装在另一侧车架(10)的外侧,该侧车架(10)上开设有孔洞,所述电机的输出端穿过孔洞并与齿轮(9)连接,若干个所述定向轮(11)分别安装在两个所述车架(10)的顶部外侧,所述定向轮(11)与导轨内壁底端滑动连接,所述导轨内安装有齿条(8),所述齿轮(9)与齿条(8)啮合。
5.根据权利要求1所述的一种基于导轨移动的线驱动柔性臂充电桩系统,其特征在于,所述升降机构包括电机、丝杆(12)以及移动板(13),所述移动板(13)设于收容舱内,所述线驱动柔性臂安装在移动板(13)底面,至少两个丝杆(12)贯穿安装于移动板(13)边缘,所述电机驱动丝杆(12)转动,带动移动板(13)上下移动,所述收容舱底部开设有供线驱动柔性臂穿过的封闭舱门。
6.根据权利要求1所述的一种基于导轨移动的线驱动柔性臂充电桩系统,其特征在于,所述驱动机构包括驱动电机(1)和绕线机构(14),所述驱动电机(1)的数量与驱动线(5)匹配,每根所述驱动线(5)绕过绕线机构(14)后与单个驱动电机(1)的输出端相连。
7.根据权利要求1所述的一种基于导轨移动的线驱动柔性臂充电桩系统,其特征在于,所述充电接头(6)为电磁吸式接头。
8.一种如权利要求1~7任一项所述的基于导轨移动的线驱动柔性臂充电桩系统的使用方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种基于导轨移动的线驱动柔性臂充电桩系统,包括柔性机构运动控制、视觉识别定位、智能运动规划等技术,完成电动汽车的充电过程全自动化。所述充电桩沿导轨移动,导轨安装于停车场顶部,导轨行程槽为充电桩持续供电。行驶机构带领充电桩到达指定电动汽车上方,视觉系统进行充电口的识别定位,同时柔性臂延伸靠近电动汽车充电接口,精确对接充电口,完成充电任务。后沿规定轨迹返回待定区域等待再次工作。本发明针对当前充电桩数量缺乏、充电效率低、智能化水平低等问题,利用导轨式移动柔性臂充电系统,完成电动汽车充电任务自动化流程,结构简单,制造成本低。
技术研发人员:郑璐恺,李胜,周杰,刘文佳,孙梦馨,苏松飞
受保护的技术使用者:南京工程学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!