车辆控制装置、车辆控制方法及存储介质与流程
本发明涉及车辆控制装置、车辆控制方法及存储介质。
背景技术:
1、近年来,提供向可持续的输送系统访问的努力活跃化,该可持续的输送系统也顾及到在交通参加者中尤其处于弱势地位的人。为了其实现通过与自动驾驶技术相关的研究开发而注力于更进一步地改善交通的安全性、便利性的研究开发。与此相关联,已知根据物体目标位置数据对存在于本车辆的左右的多个行驶路边界中的各行驶路边界设定优先级,并对照优先级高的行驶路边界的物体目标位置数据与地图信息所包括的物体目标位置信息来推定本车辆的自己位置的技术(例如,日本特开2018-084960号公报)。
技术实现思路
1、然而,在自动驾驶技术中,存在由于车辆周边的辨识精度、地图信息的精度、更新时机等不能利用相机等恰当地辨识划分行驶车道的道路划分线而不能继续自动驾驶这一课题。
2、本发明的方案的目的之一在于为了解决上述课题而提供能够根据车辆周边的辨识结果执行更恰当的驾驶控制的车辆控制装置、车辆控制方法及存储介质。然后,进而有助于可持续的输送系统的发展。
3、本发明所涉及的车辆控制装置、车辆控制方法及存储介质采用了以下的结构。
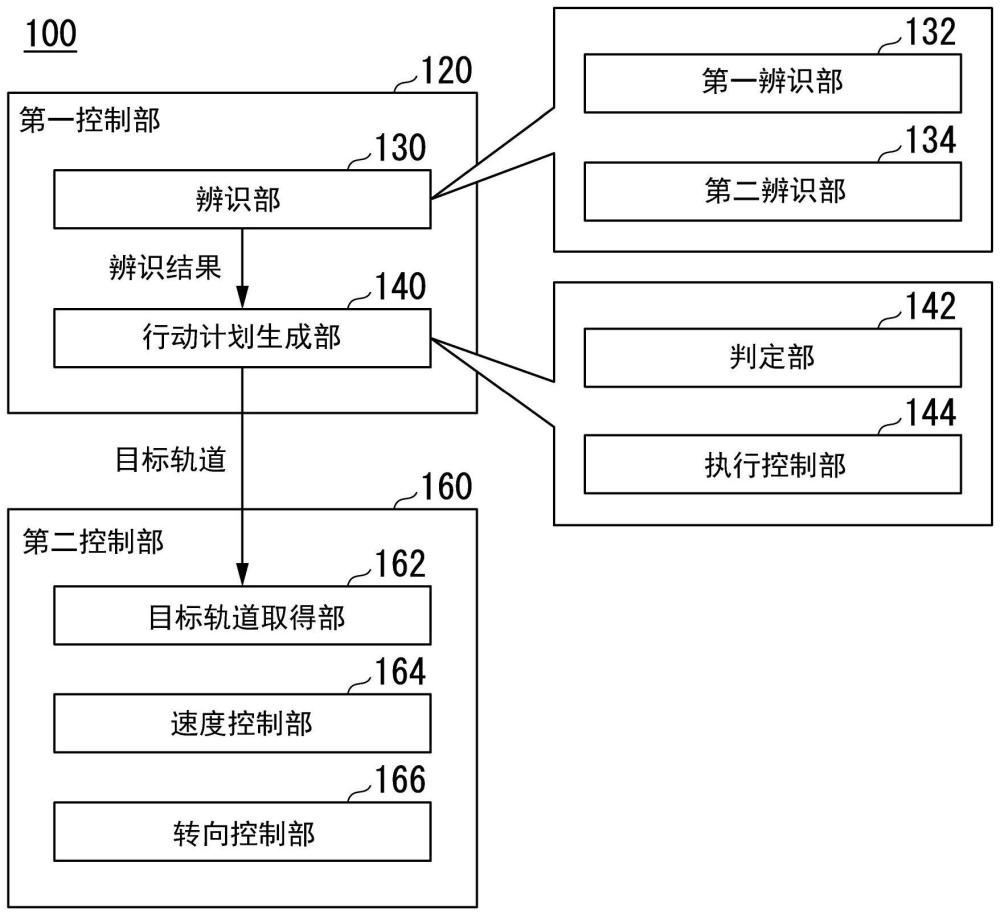
4、(1):本发明的一方案所涉及的车辆控制装置具备:第一辨识部,其基于检知到本车辆的周边状况的检知器件的输出,来辨识包括划分所述本车辆的行驶车道的第一划分线及在所述本车辆的前方存在的前方行驶车辆在内的周边状况;第二辨识部,其基于所述本车辆的位置信息,根据地图信息来辨识划分所述本车辆的周边的车道的第二划分线;以及驾驶控制部,其基于所述第一辨识部的辨识结果和所述第二辨识部的辨识结果,来执行控制所述本车辆的转向及速度中的至少转向的驾驶控制,所述驾驶控制部在所述本车辆于车道变化区间行驶、且由所述第一辨识部辨识到的所述第一划分线与所述第二划分线吻合的情况下,执行以吻合了的划分线为基础的第一驾驶控制,在所述本车辆于车道变化区间行驶、且所述第一划分线与所述第二划分线不吻合的情况下,执行以所述第一划分线和所述前方行驶车辆的行驶位置信息为基础的第二驾驶控制。
5、(2):在上述(1)的方案的基础上,所述前方行驶车辆包括在所述本车辆的行驶车道上行驶的第一其他车辆、以及在所述行驶车道的相邻车道行驶的第二其他车辆。
6、(3):在上述(2)的方案的基础上,所述行驶位置信息包括行驶轨迹,所述驾驶控制部取得所述第一其他车辆和所述第二其他车辆各自的行驶轨迹,在取得的各个行驶轨迹的形状与所述第一划分线的形状吻合的情况下,执行所述第二驾驶控制。
7、(4):在上述(1)的方案的基础上,所述行驶位置信息包括行驶轨迹,所述驾驶控制部在所述第一划分线与所述前方行驶车辆的行驶轨迹吻合的情况下,执行第二驾驶控制。
8、(5):在上述(2)的方案的基础上,所述驾驶控制部在由所述第一辨识部在规定期间内辨识到所述第一其他车辆及所述第二其他车辆的情况下,执行所述第二驾驶控制。
9、(6):在上述(1)的方案的基础上,所述驾驶控制部使用由所述第一辨识部辨识到的划分所述本车辆的行驶车道的两个第一划分线中的一方、以及根据所述地图信息辨识到的划分所述本车辆的行驶车道的两个第二划分线中的一方,来判定是否吻合。
10、(7):在上述(1)的方案的基础上,所述驾驶控制部在执行所述第二驾驶控制后所述第一划分线与所述第二划分线吻合了的情况下,从执行所述第二驾驶控制起经过规定期间或行驶规定距离为止继续所述第二驾驶控制。
11、(8):在上述(1)的方案的基础上,所述驾驶控制部在从执行所述第二驾驶控制起经过规定期间或行驶规定距离后,结束所述第二驾驶控制。
12、(9):在上述(1)的方案的基础上,所述驾驶控制部在所述本车辆或所述本车辆的利用者具有执行所述驾驶控制的权限的情况下,执行所述第一驾驶控制及所述第二驾驶控制。
13、(10):本发明的一方案所涉及的车辆控制方法使计算机进行如下处理:基于检知到本车辆的周边状况的检知器件的输出,来辨识包括划分所述本车辆的周边的车道的第一划分线及在所述本车辆的前方存在的前方行驶车辆在内的周边状况;基于所述本车辆的位置信息,根据地图信息来辨识划分所述本车辆的周边的车道的第二划分线;基于辨识到的结果,来执行控制所述本车辆的转向及速度中的至少转向的驾驶控制;在所述本车辆于车道变化区间行驶、且所述第一划分线与所述第二划分线吻合的情况下,执行以吻合了的划分线为基础的第一驾驶控制,在所述本车辆于车道变化区间行驶、且所述第一划分线与所述第二划分线不吻合的情况下,执行以所述第一划分线和所述前方行驶车辆的行驶位置信息为基础的第二驾驶控制。
14、(11):本发明的一方案所涉及的存储介质存储有程序,其中,所述程序使计算机进行如下处理:基于检知到本车辆的周边状况的检知器件的输出,来辨识包括划分所述本车辆的周边的车道的第一划分线及在所述本车辆的前方存在的前方行驶车辆在内的周边状况;基于所述本车辆的位置信息,根据地图信息来辨识划分所述本车辆的周边的车道的第二划分线;基于辨识到的结果,来执行控制所述本车辆的转向及速度中的至少转向的驾驶控制;在所述本车辆于车道变化区间行驶、且所述第一划分线与所述第二划分线吻合的情况下,执行以吻合了的划分线为基础的第一驾驶控制,在所述本车辆于车道变化区间行驶、且所述第一划分线与所述第二划分线不吻合的情况下,执行以所述第一划分线和所述前方行驶车辆的行驶位置信息为基础的第二驾驶控制。
15、根据上述(1)~(11)的方案,能够根据车辆周边的辨识结果执行更恰当的驾驶控制。
技术特征:
1.一种车辆控制装置,其中,
2.根据权利要求1所述的车辆控制装置,其中,
3.根据权利要求2所述的车辆控制装置,其中,
4.根据权利要求1所述的车辆控制装置,其中,
5.根据权利要求2所述的车辆控制装置,其中,
6.根据权利要求1所述的车辆控制装置,其中,
7.根据权利要求1所述的车辆控制装置,其中,
8.根据权利要求1所述的车辆控制装置,其中,
9.根据权利要求1所述的车辆控制装置,其中,
10.一种车辆控制方法,其中,
11.一种存储介质,其存储有程序,其中,
技术总结
车辆控制装置、车辆控制方法及存储介质。其具备:第一辨识部,基于检知到本车辆的周边状况的检知器件的输出辨识包括划分本车辆的行驶车道的第一划分线及本车辆的前方存在的前方行驶车辆的周边状况;第二辨识部,基于本车辆的位置信息根据地图信息辨识划分本车辆的周边的车道的第二划分线;驾驶控制部,基于第一辨识部和第二辨识部的辨识结果执行控制本车辆的转向及速度中的至少转向的驾驶控制,驾驶控制部在本车辆于车道变化区间行驶且由第一辨识部辨识到的第一划分线与第二划分线吻合的情况下执行基于吻合了的划分线的第一驾驶控制,在第一划分线与第二划分线不吻合的情况下执行基于第一划分线和前方行驶车辆的行驶位置信息的第二驾驶控制。
技术研发人员:井上大地,田村祥
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!