用于运行车辆的驱动系的方法和控制器与流程
本发明涉及用于运行车辆的驱动系的方法。本发明还涉及用于运行车辆的驱动系的控制器。
背景技术:
1、de 10 2019 214 986 a1和de 10 2019 216 562 a1分别公开了构造为电动车辆的车辆的驱动系。在其中公开的驱动系具有第一电机和第二电机,其中,两个电机在中间接有传动装置的情况下作用到共同的输出部上,即作用到共同的驱动桥上。
2、由实践中已知,可以利用两个电机以电机的对称运行和电机的非对称运行来运行车辆的驱动系。在对称运行中,第一电机和第二电机以相同转矩和相同转矩梯度受负荷或运行。在非对称运行中,第一电机和第二电机以不同转矩和/或不同转矩梯度受负荷或运行。
3、在de 10 2019 214 986 a1和de 10 2019 216 562 a1的驱动系中,电机的非对称运行尤其是被用于在接在两个电机与输出部之间的传动装置中执行动力换挡。在此,第一电机被用作主驱动机,而第二电机在换挡过程的实施期间被用于牵引力支持。这种动力换挡过程也被称为电动力换挡过程。
4、当车辆的驱动系的电机以不同转矩和/或不同转矩梯度受负荷或运行时,电机以及配属给电机的相应的功率电子器件经受不同的热负荷。电机以及功率电子器件的不同的热负荷导致不同的老化。当电机或功率电子器件不同地老化时,这对驱动系的所具有的使用时间造成影响。为了确保驱动系的尽可能长的使用时间或运行时长,电机以及功率电子器件应相似地老化。
技术实现思路
1、存在对如下用于运行机动车的驱动系的方法和控制器的需求:借助它们能够确保电机以及配属给电机的功率电子器件的相似老化。由此出发,本发明的任务在于,提供新型的用于运行机动车的驱动系的方法和控制器。
2、该任务通过根据专利权利要求1的方法来解决。根据本发明,当驱动系由于驱动系的限定的运行条件以电机的非对称运行来运行并且又应被切换到电机的对称运行中时,接下来在经修改的运行中使在电机的非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机在限定的持续时间中以经限制的转矩和/或以经限制的转矩梯度受负荷或运行或者使那个电机关断或脱联,以便至少部分补偿由电机的非对称运行造成的第一电机和第二电机以及第一功率电子器件和第二功率电子器件的不同的老化。
3、如果驱动系尤其是为了在与第一和第二电机耦联的传动装置中执行电动力换挡而以电机的非对称运行来运行,则根据本发明建议,接下来不直接切换到电机的对称运行中,而是采用电机的经修改的运行,在该经修改的运行中,使在非对称运行中受较高负荷的电机进而相应的受较高负荷的功率电子器件不那么强烈受负荷,其方式是:使在非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机接下来在限定的持续时间中以经限制的转矩和/或以经限制的转矩梯度受负荷或运行或者甚至使那个电机关断或脱联,以便至少部分补偿或弥补由非对称运行造成的第一和第二电机以及第一和第二功率电子器件的不同的老化。因此,可以提高驱动系的可用性。能够避免如下情形,即,在非对称运行中尤其是在实施电动力换挡的情况下以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机或那个功率电子器件相较于另一电机明显更早地老化且更早地达到其最大使用寿命。
4、优选地,在经修改的运行期间提升在非对称运行中以较低转矩和/或以较低转矩梯度受负荷或运行的那个电机的转矩和/或转矩梯度,以便至少部分弥补对另一电机的转矩和/或转矩梯度的限制或者关断或脱联。由此确保了不会由于根据本发明的方法损害驱动性能。
5、优选地,仅当对在非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机的转矩和/或转矩梯度的限制能由另一电机以多于预定的份额来弥补、尤其是完全弥补时,才采用经修改的运行。由此也能够确保不会由于根据本发明的方法损害驱动系的驱动性能。
6、优选地,当进行驱动系的加速或能量回收时和/或当完成加速或能量回收之后在以近似恒定的行驶速度行驶期间,尤其是当各自的电机在基础转速区域中运行时,采用经修改的运行。尤其地,在进行驱动系的加速或能量回收时和/或在完成驱动系的加速或能量回收之后在以新的行驶速度行驶期间,采用本发明的经修改的运行。在此,各自的电机优选在电机的基础转速区域或恒定功率区域(恒定转矩区域)中运行,以便能够尽可能最大限度地利用本发明。
7、根据本发明的控制器在权利要求10中限定。
技术特征:
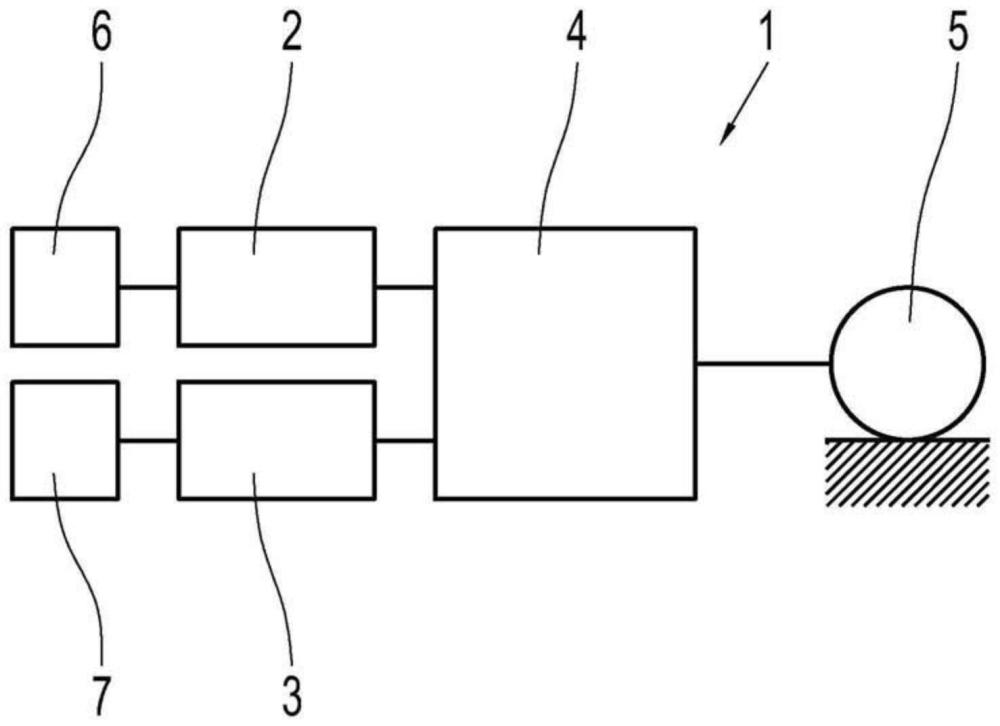
1.用于运行车辆的驱动系(1)的方法,
2.根据权利要求1所述的方法,其特征在于,在所述经修改的运行期间提升在非对称运行中以较低转矩和/或以较低转矩梯度受负荷或运行的那个电机(2、3)的转矩和/或转矩梯度,以便至少部分弥补对另一电机(2、3)的转矩和/或转矩梯度的限制或者对另一电机的关断或脱联。
3.根据权利要求1或2所述的方法,其特征在于,仅当对在非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机(2、3)的转矩和/或转矩梯度的限制能由另一电机(2、3)以多于预定的份额来弥补时,才采用所述经修改的运行。
4.根据权利要求3所述的方法,其特征在于,仅当对在非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机(2、3)的转矩和/或转矩梯度的限制能由另一电机(2、3)完全弥补时,才采用所述经修改的运行。
5.根据权利要求1至4中任一项所述的方法,其特征在于,当进行所述驱动系(1)的加速或能量回收时和/或当完成加速或能量回收之后在所述驱动系(1)行驶期间,采用所述经修改的运行。
6.根据权利要求5所述的方法,其特征在于,当在加速或能量回收期间不能由在非对称运行中以较低转矩和/或以较低转矩梯度受负荷或运行的那个电机(2、3)独自提供相应的转矩时,在加速或能量回收期间限制在非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机(2、3)的转矩梯度,并且当所述驱动系(1)的加速或能量回收终止或被终止时,终止所述经修改的运行并切换到电机(2、3)的对称运行中。
7.根据权利要求5所述的方法,其特征在于,当在加速或能量回收期间不能由在非对称运行中以较低转矩和/或以较低转矩梯度受负荷或运行的那个电机(2、3)独自提供相应的转矩时,在加速或能量回收期间采用对称运行并随后在以某一行驶速度行驶期间使在非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机(2、3)关断或脱联。
8.根据权利要求5所述的方法,其特征在于,当在加速或能量回收期间能够由在非对称运行中以较低转矩和/或以较低转矩梯度受负荷或运行的那个电机(2、3)独自提供相应的转矩时,使在非对称运行中以较高转矩和/或以较高转矩梯度受负荷或运行的那个电机(2、3)关断或脱联,而且这也发生在接在加速或能量回收之后的行驶中。
9.根据权利要求1至8中任一项所述的方法,其特征在于,当各自的电机(2、3)在基础转速区域和/或恒定功率区域中运行时,采用所述经修改的运行。
10.车辆的控制器,所述控制器被设立成用于自动实施根据权利要求1至9中任一项或多项所述的方法。
技术总结
本发明涉及用于运行车辆的驱动系的方法和控制器。该驱动系具备带有第一功率电子器件的第一电机和带有第二功率电子器件的第二电机,在电机的对称运行中,第一和第二电机以相同转矩和相同转矩梯度运行,在电机的非对称运行中,第一和第二电机以不同转矩和/或不同转矩梯度运行,当驱动系由于限定的运行条件以电机的非对称运行来运行并且又应被切换到电机的对称运行中时,接下来在经修改的运行中使在非对称运行中以较高转矩和/或以较高转矩梯度运行的那个电机在限定的持续时间中以经限制的转矩和/或以经限制的转矩梯度运行或者使其关断或脱联,以便至少部分补偿由非对称运行造成的第一和第二电机以及第一和第二功率电子器件的不同的老化。
技术研发人员:约翰尼斯·格吕克勒,克里斯蒂安·米特尔贝格尔,莫滕·斯舍尔佩兹,斯特凡·施皮勒
受保护的技术使用者:采埃孚股份公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!