自动泊车方法、装置和车辆与流程
本申请涉及智能驾驶,尤其涉及一种自动泊车方法、装置和车辆。
背景技术:
1、自动泊车辅助系统(automated parking assist,apa)是一种针对泊车场景下的自动驾驶功能,通过自动泊车辅助系统,在不需要驾驶员介入的情况下自动将车辆泊入到目标车位中。自动泊车辅助系统在泊车过程中需要通过全景环视系统(around viewmonitor,avm)采集得到车辆周围的鸟瞰图,然后检测鸟瞰图中存在的车位,确定目标车位的位置。
2、目前,在检测鸟瞰图中的车位时,受益于深度学习(deep learning,dl)的高速发展,主要使用神经网络检测鸟瞰图中的车位,其中,深度学习是一种通过构造多层神经网络并逐层提取特征的方式,将数据样本由原空间变换为指定的特征空间的方法。
3、但是目前的这种车位检测方式,使用神经网络对鸟瞰图中的车位进行检测需要大量的标注数据集,并且因泊车功能的特殊性,需要对鸟瞰图中的车位检测有较高的精度要求,这使得对标注数据也有更高的要求,导致前期需要投入大量成本来得到标注数据集,成本高。
技术实现思路
1、本申请提供一种自动泊车方法、装置和车辆,用于解决现有自动泊车成本投入高的问题。
2、第一方面,本申请实施例提供一种一种自动泊车方法,包括:
3、获取在车辆泊车过程中采集得到的目标图像帧,所述目标图像帧中包括有用于泊车的目标车位,所述车辆在泊车场地泊车时可探测到所述泊车场地中设置的至少两个靶标并获取到图像帧,所述图像帧中包含所述靶标的靶标图案;
4、在所述目标图像帧中确定出至少两个目标靶标图案和所述目标靶标图案的位置;
5、至少根据所述目标靶标图案的位置,将所述车辆泊入至所述目标车位。
6、在第一方面的一种可能设计中,所述方法还包括
7、获取在车辆泊车过程中采集得到的图像帧的像素尺寸,所述车辆在泊车过程中可采集得到至少一帧图像帧;
8、根据所述图像帧的像素尺寸,确定所述图像帧的视野范围;
9、根据所述视野范围,确定设置于所述泊车场地中的靶标的尺寸大小,所述泊车场地中设置有至少两个靶标,所述靶标中配置有靶标图案。
10、在第一方面的另一种可能设计中,所述靶标图案包括n个同心圆,n为正整数。
11、在第一方面的再一种可能设计中,所述获取在车辆泊车过程中采集得到的目标图像帧,包括:
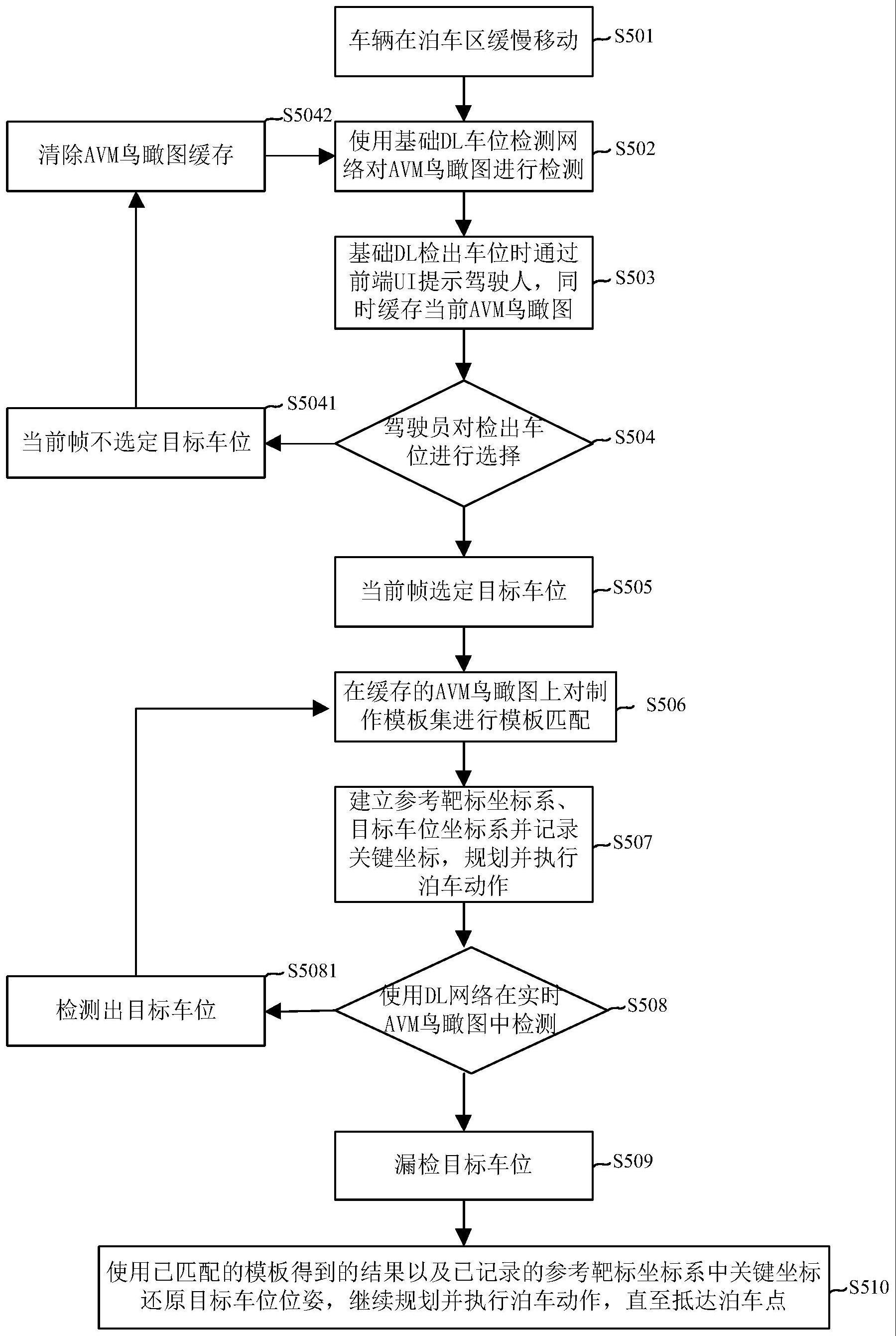
12、在车辆泊车过程中获取当前图像帧,检测当前图像帧中是否存在车位;
13、若当前图像帧中存在车位,则输出提示信息,所述提示信息用于提示用户是否选择该车位作为目标车位;
14、响应于用户根据所述提示信息输入的确认信号,将所述当前图像帧作为目标图像帧,所述确认信号用于表征用户选择该车位作为目标车位。
15、在第一方面的又一种可能设计中,所述在所述目标图像帧中确定出至少两个目标靶标图案,包括:
16、获取模板集合,所述模板集合包括所述泊车场地中配置的每个靶标的靶标图案;
17、将所述目标图像帧与所述模板集合中每个靶标的靶标图案进行逐一对比匹配,得到每个靶标图案的匹配结果分;
18、在靶标图案的匹配结果分大于预设匹配分阈值时,将该靶标图案确定为目标靶标图案。
19、在第一方面的又一种可能设计中,所述至少根据所述目标靶标图案的位置,将所述车辆泊入至所述目标车位,包括:
20、在所述车辆泊入所述目标车位的过程中,持续获取图像帧;
21、确定所述图像帧中是否存在所述目标车位;
22、若所述图像帧中不存在所述目标车位,则根据所述目标靶标图案的位置,建立坐标系;
23、根据所述目标靶标图案的位置,在所述坐标系中复刻所述目标车位;
24、根据复刻的目标车位,将所述车辆泊入至所述目标车位。
25、在第一方面的又一种可能设计中,所述至少根据所述目标靶标图案的位置,将所述车辆泊入至所述目标车位,包括:
26、在所述车辆泊入所述目标车位的过程中,持续获取图像帧;
27、确定所述图像帧中是否存在所述目标车位;
28、若所述图像帧中存在所述目标车位,则根据所述目标车位和所述目标靶标图案的位置,将所述车辆泊入至所述目标车位。
29、在第一方面的又一种可能设计中,所述将所述车辆泊入至所述目标车位,包括:
30、获取用于标识所述目标车位准入线的两个角点位置点,并作为车位标识位置点;
31、获取所述车辆在泊车过程中的车辆标识位置点;
32、根据所述车辆标识位置点、车位标识位置点和所述目标靶标图案的中心点,将所述车辆泊入至所述目标车位。
33、在第一方面的又一种可能设计中,所述在所述目标图像帧中确定出至少两个目标靶标图案和所述目标靶标图案的位置,包括:
34、在所述目标图像帧中获取用于标识所述目标车位准入线的两个角点位置点,并作为车位标识位置点;
35、根据所述两个车位标识位置点,在所述目标图像帧中确定出车位准入线中心标识点;
36、获取在所述目标图像帧中与所述中心标识点距离最近的靶标图案,作为所述目标靶标图案。
37、第二方面,本申请实施例提供一种自动泊车装置,包括:
38、图像获取模块,用于获取在车辆泊车过程中采集得到的目标图像帧,所述目标图像帧中包括有用于泊车的目标车位,所述车辆在泊车场地泊车时可探测到所述泊车场地中设置的至少两个靶标并获取到图像帧,所述图像帧中包含所述靶标的靶标图案;
39、位置确定模块,用于在所述目标图像帧中确定出至少两个目标靶标图案和所述目标靶标图案的位置;
40、泊车控制模块,用于至少根据所述目标靶标图案的位置,将所述车辆泊入至所述目标车位。
41、第三方面,本申请实施例提供一种车辆,包括:处理器,以及与所述处理器通信连接的存储器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,以实现如上述的方法。
42、第四方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如上述的方法。
43、第五方面,本申请实施例提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的方法。
44、本申请实施例提供的自动泊车方法、装置和车辆,通过在泊车场地中配置靶标并保证车辆在自动泊车过程中能够捕捉到至少两个靶标,使得在车辆泊入的全过程中保持对目标车位的跟踪不间断,在保证泊车成功率的同时也不再需要大量的标注数据集,降低自动泊车辅助系统的成本投入。
技术特征:
1.一种自动泊车方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括
3.根据权利要求1或2所述的方法,其特征在于,所述靶标图案包括n个同心圆,n为正整数。
4.根据权利要求1所述的方法,其特征在于,所述获取在车辆泊车过程中采集得到的目标图像帧,包括:
5.根据权利要求1所述的方法,其特征在于,在所述目标图像帧中确定出至少两个目标靶标图案,包括:
6.根据权利要求1所述的方法,其特征在于,所述至少根据所述目标靶标图案的位置,将所述车辆泊入至所述目标车位,包括:
7.根据权利要求1所述的方法,其特征在于,所述至少根据所述目标靶标图案的位置,将所述车辆泊入至所述目标车位,包括:
8.根据权利要求6或7所述的方法,其特征在于,所述将所述车辆泊入至所述目标车位,包括:
9.根据权利要求1所述的方法,其特征在于,在所述目标图像帧中确定出至少两个目标靶标图案和所述目标靶标图案的位置,包括:
10.一种自动泊车装置,其特征在于,包括:
11.一种车辆,其特征在于,包括:处理器,以及与所述处理器通信连接的存储器;
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1至9任一项所述的方法。
13.一种计算机程序产品,其特征在于,包括计算机程序,该计算机程序被处理器执行时实现权利要求1至9中任一项所述的方法。
技术总结
本申请提供一种自动泊车方法、装置和车辆,涉及智能驾驶技术领域,该方法包括:获取在车辆泊车过程中采集得到的目标图像帧,目标图像帧中包括有用于泊车的目标车位,车辆在泊车场地泊车时可探测到泊车场地中设置的至少两个靶标并获取到图像帧,图像帧中包含靶标的靶标图案;在目标图像帧中确定出至少两个目标靶标图案和目标靶标图案的位置;至少根据目标靶标图案的位置,将车辆泊入至目标车位。该技术方案中,通过在泊车场地中配置靶标并保证车辆在自动泊车过程中能够捕捉到至少两个靶标,使得在车辆泊入的全过程中保持对目标车位的跟踪不间断,在保证泊车成功率的同时也不再需要大量的标注数据集,降低自动泊车辅助系统的成本投入。
技术研发人员:罗昌平,蔡俊杰,赵琼,顾敏奇,赵龙,朱逸彬
受保护的技术使用者:斑马网络技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!