驱动系统和控制方法与流程
本文涉及一种驱动系统和控制方法。
背景技术:
0、背景
1、美国专利号9,987,916中披露了一种用于控制马达以减小电动车辆的振动的设备和方法。
技术实现思路
0、概述
1、在至少一种构型中,提供了一种用于控制车辆的驱动系统的方法。该方法包括确定转矩命令信号与被阻尼转矩命令信号之间的误差。该误差是通过将转矩命令信号与被阻尼转矩命令信号进行比较来确定。该方法包括确定该误差是否超过阈值。当该误差超过阈值时,减小被阻尼转矩命令信号的阻尼。该驱动系统的转矩源基于该被阻尼转矩命令信号来提供转矩。
2、转矩命令信号可以是基于加速踏板的位置。
3、将转矩命令信号与被阻尼转矩命令信号进行比较可以包括:将转矩命令信号减去被阻尼转矩命令信号。
4、该阈值可以是基于车辆的共振频率。被阻尼转矩命令信号可以是基于转矩命令信号。被阻尼转矩命令信号可以通过对转矩命令信号进行滤波来确定。
5、被阻尼转矩命令信号可以用来自转矩请求增大查找表的数据来进行滤波。被阻尼转矩命令信号可以用来自转矩请求下降查找表的数据来进行滤波。被阻尼转矩命令信号可以通过使用来自转矩请求增大查找表中的数据和来自转矩请求下降查找表中的数据对转矩命令信号进行滤波来确定的。转矩请求增大查找表可以控制转矩命令信号的阻尼增大的速率。转矩请求下降查找表可以控制转矩命令信号的阻尼下降的速率。用转矩请求增大查找表和转矩请求下降查找表来对转矩命令信号进行滤波可以包括:基于该误差来从转矩请求增大查找表中选择一个值,以及基于该误差来从转矩请求下降查找表中选择一个值。
6、当误差超过阈值时减小被阻尼转矩命令信号的阻尼可以包括:将被阻尼转矩命令信号的阻尼与误差成比例地减小。
7、减小被阻尼转矩命令信号的阻尼可以包括:当转矩命令信号指示加速请求时渐进地减小阻尼。转矩源基于被阻尼转矩命令信号来提供转矩可以包括:当误差超过阈值并且转矩命令信号指示加速请求时,沿着连续的曲线来增大转矩源提供的转矩。
8、减小被阻尼转矩命令信号的阻尼可以包括:当转矩命令信号指示减速请求时渐进地减小阻尼。转矩源基于被阻尼转矩命令信号来提供转矩可以包括:当误差超过阈值并且转矩命令信号指示减速请求时,沿着连续的曲线来减小转矩源提供的转矩。
9、该方法可以包括:当误差不超过阈值时,该控制器不减小被阻尼转矩命令信号的阻尼。该阈值可以是常数。
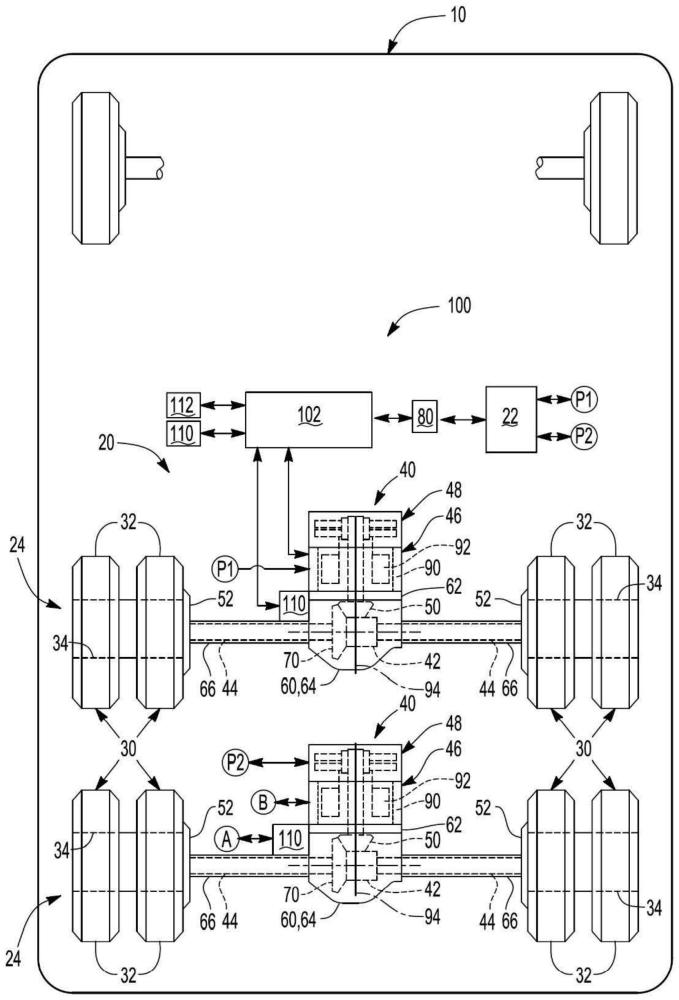
10、在至少一个实施例中,提供了一种驱动系统。该驱动系统包括转矩源、加速踏板、加速踏板位置传感器、和控制器。该转矩源被配置用于向车轮提供转矩。该加速踏板位置传感器基于加速踏板的位置来提供转矩命令信号。该控制器基于被阻尼转矩命令信号来控制转矩源提供的转矩。该控制器被配置为当转矩命令信号与被阻尼转矩命令信号之间的误差超过阈值时,减小被阻尼转矩命令信号的阻尼。
11、当误差不超过阈值时,该控制器可以不减小被阻尼转矩命令信号的阻尼。
12、加速踏板可以由驾驶员的脚来致动。不减小被阻尼转矩命令信号的阻尼可以过滤脚的振动。
13、转矩源可以是电动马达。该电动马达可以提供转矩。
技术特征:
1.一种用于控制车辆的驱动系统的方法,所述方法包括:
2.如权利要求1所述的方法,其中,所述转矩命令信号是基于加速踏板的位置。
3.如权利要求1所述的方法,其中,将所述转矩命令信号与所述被阻尼转矩命令信号进行比较包括:将所述转矩命令信号减去所述被阻尼转矩命令信号。
4.如权利要求1所述的方法,其中,所述阈值是基于所述车辆的共振频率。
5.如权利要求1所述的方法,其中,所述被阻尼转矩命令信号是基于所述转矩命令信号。
6.如权利要求1所述的方法,其中,所述被阻尼转矩命令信号是通过使用来自转矩请求增大查找表中的数据和来自转矩请求下降查找表中的数据对所述转矩命令信号进行滤波来确定的。
7.如权利要求6所述的方法,其中,所述转矩请求增大查找表控制所述转矩命令信号的阻尼增大的速率。
8.如权利要求6所述的方法,其中,所述转矩请求下降查找表控制所述转矩命令信号的阻尼下降的速率。
9.如权利要求6所述的方法,其中,用所述转矩请求增大查找表和所述转矩请求下降查找表来对所述转矩命令信号进行滤波包括:基于所述误差来从所述转矩请求增大查找表中选择一个值,以及基于所述误差来从所述转矩请求下降查找表中选择一个值。
10.如权利要求1所述的方法,其中,所述阈值是常数。
11.如权利要求1所述的方法,其中,当所述误差超过所述阈值时减小所述被阻尼转矩命令信号的阻尼包括:将所述被阻尼转矩命令信号的阻尼与所述误差成比例地减小。
12.如权利要求1所述的方法,其中,当所述误差超过所述阈值时减小所述被阻尼转矩命令信号的阻尼包括:当所述转矩命令信号指示加速请求时渐进地减小所述阻尼。
13.如权利要求12所述的方法,其中,所述转矩源基于所述被阻尼转矩命令信号来提供转矩包括:沿着连续曲线增大所述转矩源提供的转矩。
14.如权利要求1所述的方法,其中,当所述误差超过所述阈值时减小所述被阻尼转矩命令信号的阻尼包括:当所述转矩命令信号指示减速请求时渐进地增大所述阻尼。
15.如权利要求14所述的方法,其中,所述转矩源基于所述被阻尼转矩命令信号来提供转矩包括:沿着连续的曲线减小所述转矩源提供的转矩。
16.如权利要求1所述的方法,进一步包括:当所述误差不超过所述阈值时,不减小所述被阻尼转矩命令信号的阻尼。
17.一种驱动系统,包括:
18.如权利要求17所述的驱动系统,其中,当所述误差不超过所述阈值时,所述控制器不减小所述被阻尼转矩命令信号的阻尼。
19.如权利要求18所述的驱动系统,其中,所述加速踏板由驾驶员的脚致动,并且不减小所述被阻尼转矩命令信号的阻尼将过滤所述脚的振动。
20.如权利要求17所述的驱动系统,其中,所述转矩源包括电动马达,并且所述电动马达提供转矩。
技术总结
披露了一种驱动系统和控制方法。该方法包括:当转矩命令信号与被阻尼转矩命令信号之间的误差超过阈值时,减小被阻尼转矩命令信号的阻尼。该驱动系统的转矩源基于该被阻尼转矩命令信号来提供转矩。
技术研发人员:弗兰克·J·法尔科内,阿梅亚·S·加萨尔
受保护的技术使用者:阿文美驰技术有限责任公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!