一种减振器控制方法、系统及汽车与流程
本发明涉及车辆控制,尤其涉及一种减振器控制方法、系统及汽车。
背景技术:
1、为提高车辆操稳与舒适性,半主动电控减振器系统成为大部分车辆必不可少的配置。目前电控减振器控制普遍采用基础天棚控制算法,但天棚控制在特殊路段比如瞬态转向和稳态转向控制的策略上缺少对路面和车身姿态的输入及判断,影响驾驶操稳性和舒适性。其中,主流以空气悬架和电控减震器组合去弱化转向带来的侧倾,但成本较高;成本较低的半主动悬架电控减震器系统缺乏对绕x轴转动的车身姿态,均难以实现车辆在瞬态、稳态转向场景中的操稳精度和舒适性。
技术实现思路
1、本发明提供了一种减振器控制方法、系统及汽车,以提高汽车转向过程中的操稳精度,同时提高舒适性。
2、根据本发明的一方面,提供了一种减振器控制方法,包括:
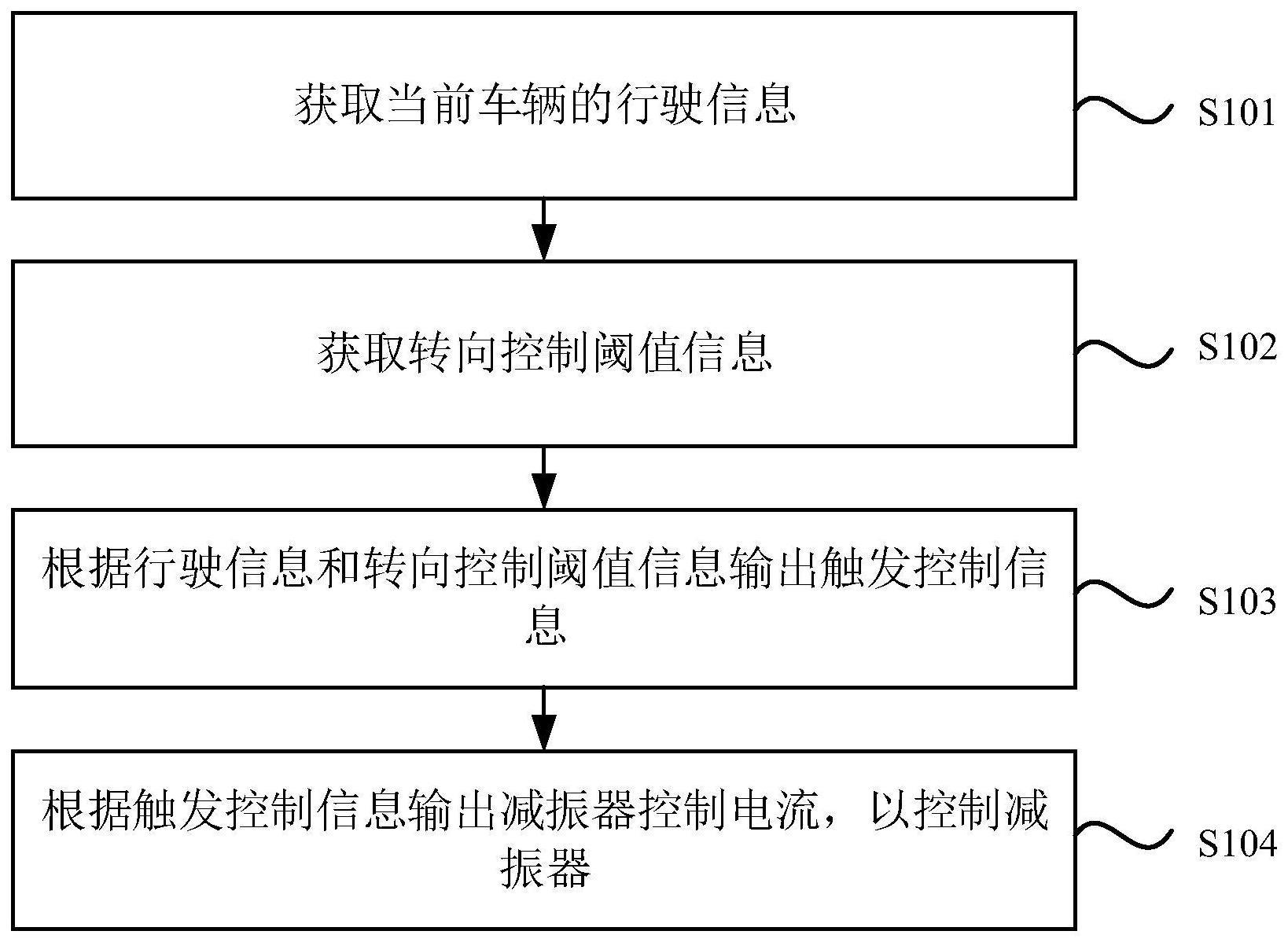
3、获取当前车辆的行驶信息;
4、获取转向控制阈值信息;
5、根据所述行驶信息和所述转向控制阈值信息输出触发控制信息;
6、根据所述触发控制信息输出减振器控制电流,以控制减振器。
7、可选的,获取车辆的行驶信息,包括:
8、获取当前车辆的侧倾角速度、横向加速度、转角和转角速度变化率。
9、可选的,获取转向控制阈值信息包括:
10、获取第一预设横向加速度;
11、根据所述行驶信息和所述转向控制阈值信息输出触发控制信息,包括:
12、判断所述横向加速度是否小于所述第一预设横向加速度;
13、若否,则输出触发控制信息;
14、若是,则输出天棚控制信息,根据所述天棚控制信息以控制减振器。
15、可选的,所述触发控制信息至少包括稳态触发控制信息和瞬态触发控制信息;
16、输出触发控制信息包括:
17、获取第二预设横向加速度;
18、判断所述横向加速度是否大于所述第二预设横向加速度;
19、若是,则根据所述侧倾角速度、所述横向加速度和所述转角速度变化率输出瞬态触发控制信息;
20、若否,则根据所述侧倾角速度和所述转角输出稳态触发控制信息。
21、可选的,根据所述触发控制信息输出减振器控制电流,以控制减振器之前,还包括:
22、获取电流分配系数。
23、可选的,所述电流分配系数至少包括与所述侧倾角速度对应的第一电流分配系数、与所述横向加速度对应的第二电流分配系数和与所述转角速度变化率对应的第三电流分配系数;
24、根据所述触发控制信息输出减振器控制电流,以控制减振器,包括:
25、根据所述第一电流分配系数、所述第二电流分配系数、所述第三电流分配系数和所述瞬态触发控制信息输出减振器控制电流,以控制减振器。
26、可选的,所述电流分配系数至少包括与所述侧倾角速度对应的第四电流分配系数和与所述转角对应的第五电流分配系数;
27、根据所述第四电流分配系数、所述第五电流分配系数和所述稳态触发控制信息输出减振器控制电流,以控制减振器。
28、可选的,获取车辆的行驶信息之后,还包括:
29、获取当前车辆的车速、转角速度、预设车速、预设转角和预设转角速度;
30、判断所述车速是否大于所述预设车速,所述转角是否大于预设转角或所述转角速度是否大于所述预设转角速度;
31、若是,则获取转向控制阈值信息;
32、若否,则输出天棚控制信息,根据所述天棚控制信息以控制减振器。
33、根据本发明的另一方面,提供了一种减振器控制系统,应用上述实施例中任一项所述的减振器控制方法,所述减振器控制系统包括:
34、行驶信息获取模块,用于获取当前车辆的行驶信息;
35、转向控制阈值信息获取模块,用于获取转向控制阈值信息;
36、触发控制信息获取模块,用于根据所述行驶信息和所述转向控制阈值信息输出触发控制信息;
37、减振器控制电流输出模块,用于根据所述触发控制信息输出减振器控制电流,以控制减振器。
38、根据本发明的另一方面,提供了一种汽车,其特征在于,包括上述方面中所述的减振器控制系统。
39、本发明实施例的技术方案,通过一种减振器控制方法,包括获取当前车辆的行驶信息;获取转向控制阈值信息;根据行驶信息和转向控制阈值信息输出触发控制信息;根据触发控制信息输出减振器控制电流,以控制减振器,提升对车辆转向过程中的操稳精度,降低车辆侧翻风险,提高舒适性。
40、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种减振器控制方法,其特征在于,包括:
2.根据权利要求1所述的减振器控制方法,其特征在于,获取车辆的行驶信息,包括:
3.根据权利要求2所述的减振器控制方法,其特征在于,获取转向控制阈值信息包括:
4.根据权利要求3所述的减振器控制方法,其特征在于,所述触发控制信息至少包括稳态触发控制信息和瞬态触发控制信息;
5.根据权利要求4所述的减振器控制方法,其特征在于,根据所述触发控制信息输出减振器控制电流,以控制减振器之前,还包括:
6.根据权利要求5所述的减振器控制方法,其特征在于,所述电流分配系数至少包括与所述侧倾角速度对应的第一电流分配系数、与所述横向加速度对应的第二电流分配系数和与所述转角速度变化率对应的第三电流分配系数;
7.根据权利要求5所述的减振器控制方法,其特征在于,所述电流分配系数至少包括与所述侧倾角速度对应的第四电流分配系数和与所述转角对应的第五电流分配系数;
8.根据权利要求1所述的减振器控制方法,其特征在于,获取车辆的行驶信息之后,还包括:
9.一种减振器控制系统,其特征在于,应用权利要求1-8中任一项所述的减振器控制方法,所述减振器控制系统包括:
10.一种汽车,其特征在于,包括权利要求9中所述的减振器控制系统。
技术总结
本发明公开了一种减振器控制方法、系统及汽车。减振器控制方法包括获取当前车辆的行驶信息;获取转向控制阈值信息;根据行驶信息和转向控制阈值信息输出触发控制信息;根据触发控制信息输出减振器控制电流,以控制减振器,提升对车辆转向过程中的操稳精度,降低车辆侧翻风险,提高舒适性。
技术研发人员:滕矗,王彦维,赵超群,刘宗伟,禹真
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!