一种绕障方法、装置及车辆与流程
本发明涉及智能驾驶,特别是涉及一种绕障方法、装置及车辆。
背景技术:
1、近年来,智能驾驶己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,智能驾驶车辆依靠自身的传感器进行场景识别,配合先进的处理器以及高精地图,可以将乘客安全舒适地导航到目标地点。然而,现有技术当中存在一些问题,不考虑其他可行车道,输出没有区分借道和变道策略,横向规划同时规划出借道和换道轨迹,不涉及对邻车道的使用。使得车辆需要针对不同障碍物进行多次绕障,从而降低车辆行驶的舒适感。
技术实现思路
1、鉴于上述问题,本发明旨在提供一种绕障方法、装置及车辆,本发明是这样实现的:
2、为了实现上述目的,本发明采用的技术方案如下:
3、本发明实施例第一方面提供了一种绕障方法,所述方法包括:
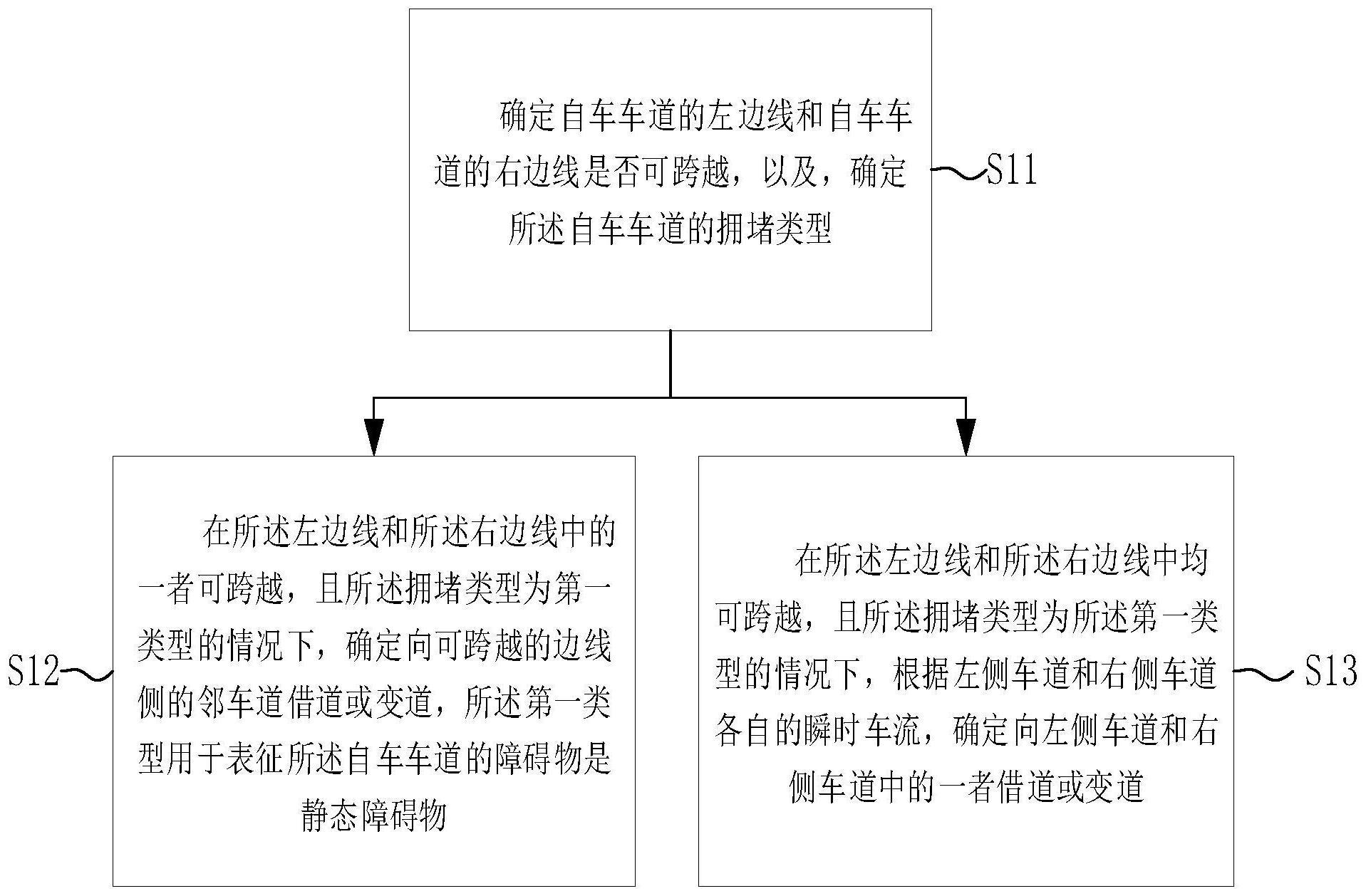
4、确定自车车道的左边线和自车车道的右边线是否可跨越,以及,确定所述自车车道的拥堵类型;
5、在所述左边线和所述右边线中的一者可跨越,且所述拥堵类型为第一类型的情况下,确定向可跨越的边线侧的邻车道借道或变道,所述第一类型用于表征所述自车车道的障碍物是静态障碍物;在所述左边线和所述右边线中均可跨越,且所述拥堵类型为所述第一类型的情况下,根据左侧车道和右侧车道各自的瞬时车流,确定向左侧车道和右侧车道中的一者借道或变道。
6、可选的,所述方法还包括:
7、在所述左边线和所述右边线均不可跨越,且所述拥堵类型为所述第一类型的情况下,确定左侧车道和右侧车道各自是否存在;
8、在左侧车道和右侧车道均存在的情况下,根据左侧车道和右侧车道各自的瞬时车流,确定向左侧车道和右侧车道中的一者借道;
9、在左侧车道和右侧车道中的一者存在的情况下,确定向存在的邻车道借道;
10、在左侧车道和右侧车道均不存在的情况下,根据道路边界与所述自车车道上的障碍物之间的剩余距离,确定借道方向。
11、可选的,所述方法还包括:
12、在所述左边线和所述右边线中的一者可跨越,且所述拥堵类型为第二类型的情况下,根据可跨越的边线侧的邻车道的车流速度和车流密度,确定是否需要向可跨越的边线侧的邻车道借道或变道,所述第二类型表征所述自车车道的障碍物的目标速度与设定速度差超过第一预设速度的持续时长超过预设时间;
13、在所述左边线和所述右边线中均可跨越,且所述拥堵类型为所述第二类型的情况下,确定左侧车道和右侧车道各自是否可用于变道以及各自是否可用于借道;
14、在左侧车道和右侧车道中至少一者可用于变道或可用于借道的情况下,根据左侧车道和右侧车道中至少一者的车流速度和车流密度,确定是否需要向左侧车道和右侧车道中的一者变道或借道。
15、可选的,根据左侧车道和右侧车道中至少一者的车流速度和车流密度,确定是否需要向左侧车道和右侧车道中的一者变道或借道,包括:
16、在左侧车道和右侧车道均可用于变道或均可用于借道的情况下,根据左侧车道和右侧车道各自的车流速度和车流密度,确定是否需要向左侧车道和右侧车道中的一者变道或借道;
17、在左侧车道和右侧车道中的一者可用于变道或可用于借道的情况下,根据可用于变道或可用于借道的邻车道的车流速度和车流密度,确定是否需要向可用于变道或可用于借道的邻车道变道或借道。
18、可选的,在所述拥堵类型为第二类型的情况下,还包括:
19、确定自车与前方路口之间的距离;
20、在所述距离小于预设距离阈值的情况下,确定自车继续行驶在所述自车车道;
21、在左侧车道和右侧车道均不可用于变道且均不可用于借道的情况下,确定自车继续行驶在所述自车车道。
22、可选的,确定所述自车车道的拥堵类型,包括:
23、在所述自车车道上的障碍物为静态障碍物的情况下,确定所述自车车道的拥堵类型为所述第一类型;
24、在所述自车车道为最右车道,且前方存在最右车道的临停车辆的情况下,确定所述自车车道的拥堵类型为所述第一类型;
25、在所述自车车道上的障碍物为动态障碍物,且所述动态障碍物的移动速度低于预设速度阈值的情况下,确定所述自车车道的拥堵类型为所述第二类型。
26、可选的,确定向邻车道借道或变道,包括:
27、根据导航信息,确定向邻车道变道是否可行;
28、在确定向邻车道变道可行的情况下,确定向邻车道变道;
29、在确定向邻车道变道不可行的情况下,确定向邻车道借道。
30、可选的,确定是否需要向邻车道借道或变道,包括:
31、在邻车道变道的车流速度和车流密度均低于设定值的情况下,确定需要向邻车道变道;
32、在邻车道变道的车流速度和车流密度中至少一者不低于所述设定值的情况下,确定需要向邻车道借道。
33、本发明实施例第二方面提供了一种车辆绕障装置,所述的装置包括:
34、拥堵类型判断模块,用于确定自车车道的左边线和自车车道的右边线是否可跨越,以及,确定所述自车车道的拥堵类型;
35、第一决策模块,用于在所述左边线和所述右边线中的一者可跨越,且所述拥堵类型为第一类型的情况下,确定向可跨越的边线侧的邻车道借道或变道,所述第一类型用于表征所述自车车道的障碍物是静态障碍物;
36、第二决策模块,用于在所述左边线和所述右边线中均可跨越,且所述拥堵类型为所述第一类型的情况下,根据左侧车道和右侧车道各自的瞬时车流,确定向左侧车道和右侧车道中的一者借道或变道。
37、本申请的另一目的在于提出一种车辆,所述车辆包括绕障模块,所述绕障模块用于实现如本发明实施例第一方面任一项所述的绕障方法。
38、本发明实施例提出的一种绕障方法,提供了一种确定自车车道的左边线和自车车道的右边线是否可跨越,以及,确定所述自车车道的拥堵类型;在所述左边线和所述右边线中的一者可跨越,且所述拥堵类型为第一类型的情况下,确定向可跨越的边线侧的邻车道借道或变道,所述第一类型用于表征所述自车车道的障碍物是静态障碍物;在所述左边线和所述右边线中均可跨越,且所述拥堵类型为所述第一类型的情况下,根据左侧车道和右侧车道各自的瞬时车流,确定向左侧车道和右侧车道中的一者借道或变道。通过本实施例提供的方法,能够避免无效换道、解决换道导致的偏航问题,也可以在自车道拥堵,保证不偏航的条件下更人性化地智能地输出变道或借道。
技术特征:
1.一种绕障方法,其特征在于,所述方法包括:
2.根据权利要求1所述的绕障方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的绕障方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的绕障方法,其特征在于,根据左侧车道和右侧车道中至少一者的车流速度和车流密度,确定是否需要向左侧车道和右侧车道中的一者变道或借道,包括:
5.根据权利要求3或4所述的绕障方法,其特征在于,在所述拥堵类型为第二类型的情况下,还包括:
6.根据权利要求1-4任一所述的绕障方法,其特征在于,确定所述自车车道的拥堵类型,包括:
7.根据权利要求1所述的绕障方法,其特征在于,确定向邻车道借道或变道,包括:
8.根据权利要求3或4所述的绕障方法,其特征在于,确定是否需要向邻车道借道或变道,包括:
9.一种车辆绕障装置,其特征在于,所述的装置包括:
10.一种车辆,其特征在于,所述车辆包括绕障模块,所述模块用于实现如权利要求1-8任一项所述的绕障方法。
技术总结
本发明涉及智能驾驶技术领域,尤其涉及一种绕障方法、装置及车辆。本发明公开的绕障方法提供了一种确定自车车道的左边线和自车车道的右边线是否可跨越,以及,确定自车车道的拥堵类型;在左边线和所述右边线中的一者可跨越,且拥堵类型为第一类型的情况下,确定向可跨越的边线侧的邻车道借道或变道,第一类型用于表征自车车道的障碍物是静态障碍物;在左边线和右边线中均可跨越,且拥堵类型为第一类型的情况下,根据左侧车道和右侧车道各自的瞬时车流,确定向左侧车道和右侧车道中的一者借道或变道。通过实施例提供的方法,能够避免无效换道、解决换道导致的偏航问题,也可以在自车道拥堵,保证不偏航的条件下更人性化地智能地输出变道或借道。
技术研发人员:戴浩君
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!