一种车辆控制方法、装置、电子设备以及车辆与流程
本发明属于汽车,尤其涉及一种车辆控制方法、装置、电子设备以及车辆。
背景技术:
1、现有技术中,一般是在车辆的目标横摆角速度与实际横摆角速度出现偏差时才会介入转向过度控制,导致车辆在转向过度控制时较晚。在特殊工况下,由于目标横摆角速度计算的局限性,可能导致驾驶员已经察觉车辆失稳却无法准确识别车辆的转向过度工况。尤其是在车辆在转弯时,司机缓慢打方向的同时突然松开油门踏板,就容易造成车辆的轴荷转移到前轴,使车辆的后轴失稳,从而造成车辆的转向过度。
技术实现思路
1、本申请的目的在于提供一种车辆控制方法、装置、电子设备以及车辆,实现对车辆在转弯过程中可能发生的转向过度工况进行预控制,降低了车辆发生转向过度的风险,提高了行车安全性。
2、为达上述目的:
3、第一方面,本申请提供了一种车辆控制方法,包括:
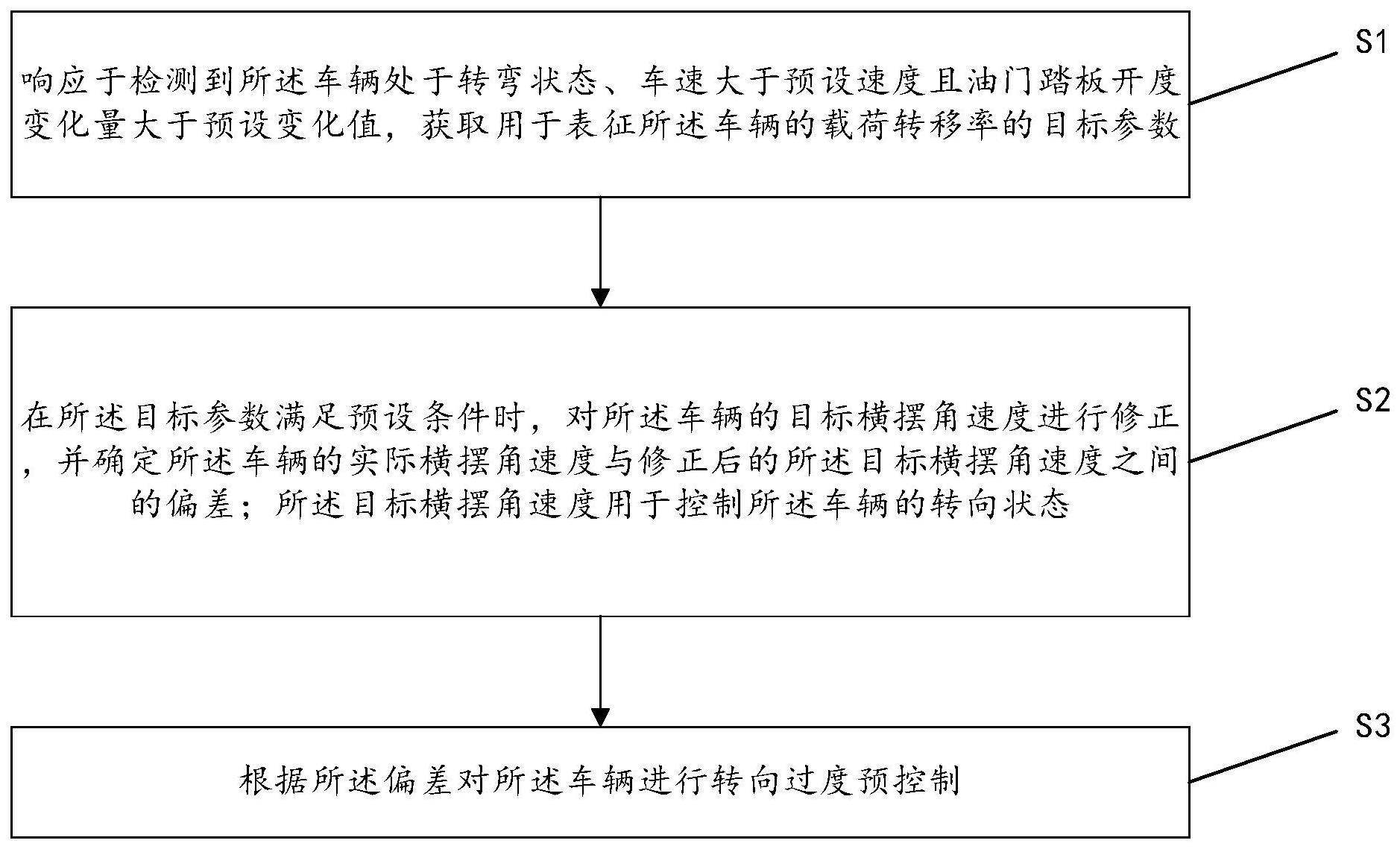
4、响应于检测到所述车辆处于转弯状态、车速大于预设速度且油门踏板开度变化量大于预设变化值,获取用于表征所述车辆的载荷转移率的目标参数;
5、在所述目标参数满足预设条件时,对所述车辆的目标横摆角速度进行修正,并确定所述车辆的实际横摆角速度与修正后的所述目标横摆角速度之间的偏差;所述目标横摆角速度用于控制所述车辆的转向状态;
6、根据所述偏差对所述车辆进行转向过度预控制。
7、在一实施方式中,所述目标参数包括:车速、侧向力、电机输出扭矩在预设时长内的下降梯度和减少量。
8、在一实施方式中,所述满足预设条件包括:
9、所述车速大于预设速度;
10、所述侧向力大于预设侧向力;
11、所述电机输出扭矩的下降梯度大于预设梯度值;
12、所述电机输出扭矩的减少量大于预设减少量阈值。
13、在一实施方式中,所述对所述车辆的目标横摆角速度进行修正,包括:
14、对所述车辆所受的侧向力进行插值计算,以确定对所述车辆的目标横摆角速度进行修正的修正因子;
15、根据所述修正因子确定修正后的所述目标横摆角速度。
16、在一实施方式中,所述根据所述偏差对所述车辆进行转向过度预控制,包括:
17、根据所述偏差、车速建压因子、侧向加速度建压因子、路面摩擦建压因子以及整车控制放大因子,确定横摆力矩;
18、基于所述横摆力矩确定所述车辆的外侧车轮的建压值,并根据所述建压值对所述车辆的姿态进行控制。
19、在一实施方式中,所述获取用于表征所述车辆的载荷转移率的目标参数之前,还包括:
20、检测所述车辆的转向过度预控功能是否处于可用状态;
21、若是,则执行获取用于表征所述车辆的载荷转移率的目标参数的步骤。
22、在一实施方式中,所述车辆的转向过度预控功能处于可用状态,包括:
23、制动踏板处于未踩下状态;
24、横摆角速度方向与后轴侧滑角方向相符,且与侧向加速度方向一致;
25、油门踏板开度小于预设的开度阈值且所述车辆不处于自由滑行状态;
26、侧向力大于预设的侧向力阈值。
27、第二方面,本申请提供了一种车辆控制装置,其特征在于,包括:
28、获取模块,用于在检测到所述车辆处于转弯状态、车速大于预设速度且油门踏板开度变化量大于预设阈值,获取用于表征所述车辆的载荷转移率的目标参数;
29、计算模块,在所述目标参数满足预设条件时,对所述车辆的目标横摆角速度进行修正,并确定修正后的所述目标横摆角速度与所述车辆的实际横摆角速度之间的偏差;所述目标横摆角速度用于控制所述车辆的转向状态;
30、控制模块,用于根据所述偏差对所述车辆进行转向过度预控制。
31、在一实施方式中,所述获取模块,具体用于:
32、获取所述车辆在转弯时的车速、侧向力、电机输出扭矩在预设时长内的下降梯度和减少量。
33、在一实施方式中,所述计算模块,具体用于:
34、对所述车辆所受的侧向力进行插值计算,以确定对所述车辆的目标横摆角速度进行修正的修正因子;
35、根据所述修正因子确定修正后的所述目标横摆角速度。
36、在一实施方式中,所述计算模块,具体用于:
37、根据所述偏差、车速建压因子、侧向加速度建压因子、路面摩擦建压因子以及整车控制放大因子,确定横摆力矩。
38、在一实施方式中,所述控制模块,具体用于:
39、基于所述横摆力矩确定所述车辆的外侧车轮的建压值,并根据所述建压值对所述车辆的姿态进行控制。
40、第三方面,本申请提供了一种电子设备,包括:处理器和用于存储可执行指令的存储器;其中,所述处理器配置执行所述指令,以实现如第一方面中任一项所述的车辆控制方法。
41、第四方面,本申请提供了一种车辆,包括如第三方面所述的电子设备。
42、本申请提供的车辆控制方法、装置、电子设备以及车辆,所述方法包括:响应于检测到所述车辆处于转弯状态、车速大于预设速度且油门踏板开度变化量大于预设变化值,获取用于表征所述车辆的载荷转移率的目标参数;在所述目标参数满足预设条件时,对所述车辆的目标横摆角速度进行修正,并确定所述车辆的实际横摆角速度与修正后的所述目标横摆角速度之间的偏差;所述目标横摆角速度用于控制所述车辆的转向状态;根据所述偏差对所述车辆进行转向过度预控制。通过上述方法,能够提前检测到车辆在转弯过程中由于车速、油门踏板开度变化量而引起的转向过度,然后通过对目标横摆角速度进行修正以介入对车辆转向过度的控制,实现在转向过度发生前就对该风险进行了抑制,降低了车辆高速过弯道时发生转向过度的风险,提高了行车安全性。
技术特征:
1.一种车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述目标参数包括:车速、侧向力、电机输出扭矩在预设时长内的下降梯度和减少量。
3.根据权利要求2所述的方法,其特征在于,所述满足预设条件包括:
4.根据权利要求1所述的方法,其特征在于,所述对所述车辆的目标横摆角速度进行修正,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述偏差对所述车辆进行转向过度预控制,包括:
6.根据权利要求1所述的方法,其特征在于,所述获取用于表征所述车辆的载荷转移率的目标参数之前,还包括:
7.根据权利要求6所述的方法,其特征在于,所述车辆的转向过度预控功能处于可用状态,包括:
8.一种车辆控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:处理器和用于存储可执行指令的存储器;其中,所述处理器配置执行所述指令,以实现如权利要求1-7中任一项所述的车辆控制方法。
10.一种车辆,其特征在于,包括如权利要求9所述的电子设备。
技术总结
本申请公开了一种车辆控制方法、装置、电子设备以及车辆,所述方法包括:响应于检测到所述车辆处于转弯状态、车速大于预设速度且油门踏板开度变化量大于预设变化值,获取用于表征所述车辆的载荷转移率的目标参数;在所述目标参数满足预设条件时,对所述车辆的目标横摆角速度进行修正,并确定所述车辆的实际横摆角速度与修正后的所述目标横摆角速度之间的偏差;所述目标横摆角速度用于控制所述车辆的转向状态;根据所述偏差对所述车辆进行转向过度预控制。本申请提供的车辆控制方法能够在车辆转弯过程中可能发生转向过度时提前介入控制,降低车辆发生转向过度的风险,提高了行车安全性。
技术研发人员:刘富庆,陶喆,张雪阳,仇江海,张俊发,苏德天
受保护的技术使用者:上海拿森汽车电子有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!