基于深度学习算法的自动驾驶安全控制系统及方法与流程
本申请涉及自动驾驶领域,且更为具体地,涉及一种基于深度学习算法的自动驾驶安全控制系统及方法。
背景技术:
1、自动驾驶是指利用计算机和传感器技术,使车辆能够在没有人类干预的情况下进行导航和驾驶操作的技术。自动驾驶技术的目标是实现更安全、高效和便利的交通系统。其中,碰撞预警系统可以帮助自动驾驶车辆及时识别潜在的碰撞风险,并采取相应的措施来避免碰撞。通过及时的预警和反应,可以大大减少交通事故的发生,提高道路交通的安全性。
2、然而,目前的感知技术仍然存在误判和漏判的问题,可能导致碰撞预警的不准确性。因此,期待一种优化的方案。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种基于深度学习算法的自动驾驶安全控制系统及方法。其可以结合深度学习算法,自动化地判断是否产生碰撞预警提示,以避免发生危险情况。
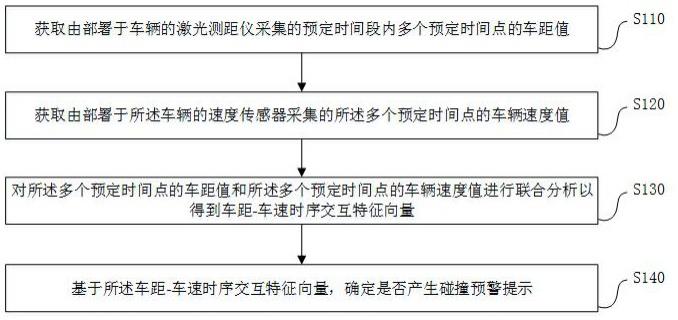
2、根据本申请的一个方面,提供了一种基于深度学习算法的自动驾驶安全控制方法,其包括:获取由部署于车辆的激光测距仪采集的预定时间段内多个预定时间点的车距值;获取由部署于所述车辆的速度传感器采集的所述多个预定时间点的车辆速度值;对所述多个预定时间点的车距值和所述多个预定时间点的车辆速度值进行联合分析以得到车距-车速时序交互特征向量;以及基于所述车距-车速时序交互特征向量,确定是否产生碰撞预警提示。
3、根据本申请的另一个方面,提供了一种基于深度学习算法的自动驾驶安全控制系统,其包括:车距值获取模块,用于获取由部署于车辆的激光测距仪采集的预定时间段内多个预定时间点的车距值;速度值获取模块,用于获取由部署于所述车辆的速度传感器采集的所述多个预定时间点的车辆速度值;联合分析模块,用于对所述多个预定时间点的车距值和所述多个预定时间点的车辆速度值进行联合分析以得到车距-车速时序交互特征向量;以及提示确认模块,用于基于所述车距-车速时序交互特征向量,确定是否产生碰撞预警提示。
4、与现有技术相比,本申请提供的基于深度学习算法的自动驾驶安全控制系统及方法,其首先获取由部署于车辆的激光测距仪采集的预定时间段内多个预定时间点的车距值,接着,获取由部署于所述车辆的速度传感器采集的所述多个预定时间点的车辆速度值,然后,对所述多个预定时间点的车距值和所述多个预定时间点的车辆速度值进行联合分析以得到车距-车速时序交互特征向量,最后,基于所述车距-车速时序交互特征向量,确定是否产生碰撞预警提示。这样,可以结合深度学习算法,自动化地判断是否产生碰撞预警提示,以避免发生危险情况。
技术特征:
1.一种基于深度学习算法的自动驾驶安全控制方法,其特征在于,包括:获取由部署于车辆的激光测距仪采集的预定时间段内多个预定时间点的车距值;获取由部署于所述车辆的速度传感器采集的所述多个预定时间点的车辆速度值;对所述多个预定时间点的车距值和所述多个预定时间点的车辆速度值进行联合分析以得到车距-车速时序交互特征向量;以及基于所述车距-车速时序交互特征向量,确定是否产生碰撞预警提示。
2.根据权利要求1所述的基于深度学习算法的自动驾驶安全控制方法,其特征在于,对所述多个预定时间点的车距值和所述多个预定时间点的车辆速度值进行联合分析以得到车距-车速时序交互特征向量,包括:提取所述多个预定时间点的车距值的车距时序特征以得到车距时序特征向量;提取所述多个预定时间点的车辆速度值的车速时序特征以得到车速时序特征向量;以及融合所述车距时序特征向量和所述车速时序特征向量以得到所述车距-车速时序交互特征向量。
3.根据权利要求2所述的基于深度学习算法的自动驾驶安全控制方法,其特征在于,提取所述多个预定时间点的车距值的车距时序特征以得到车距时序特征向量,包括:将所述多个预定时间点的车距值通过包含上采样层和一维卷积层的车距时序特征提取器以得到所述车距时序特征向量。
4.根据权利要求3所述的基于深度学习算法的自动驾驶安全控制方法,其特征在于,提取所述多个预定时间点的车辆速度值的车速时序特征以得到车速时序特征向量,包括:将所述多个预定时间点的车辆速度值通过包含上采样层和一维卷积层的车辆速度时序特征提取器以得到所述车速时序特征向量。
5.根据权利要求4所述的基于深度学习算法的自动驾驶安全控制方法,其特征在于,融合所述车距时序特征向量和所述车速时序特征向量以得到所述车距-车速时序交互特征向量,包括:使用特征间注意力层来对所述车距时序特征向量和所述车速时序特征向量进行基于注意力机制的特征交互以得到所述车距-车速时序交互特征向量。
6.根据权利要求5所述的基于深度学习算法的自动驾驶安全控制方法,其特征在于,基于所述车距-车速时序交互特征向量,确定是否产生碰撞预警提示,包括:将所述车距-车速时序交互特征向量通过分类器以得到分类结果,所述分类结果用于表示是否产生碰撞预警提示。
7.根据权利要求6所述的基于深度学习算法的自动驾驶安全控制方法,其特征在于,还包括训练步骤:对所述包含上采样层和一维卷积层的车距时序特征提取器、所述包含上采样层和一维卷积层的车辆速度时序特征提取器、所述特征间注意力层和所述分类器进行训练;其中,所述训练步骤,包括:获取训练数据,所述训练数据包括预定时间段内多个预定时间点的训练车距值、所述多个预定时间点的训练车辆速度值,以及,是否产生碰撞预警提示的真实值;将所述多个预定时间点的训练车距值通过所述包含上采样层和一维卷积层的车距时序特征提取器以得到训练车距时序特征向量;将所述多个预定时间点的训练车辆速度值通过所述包含上采样层和一维卷积层的车辆速度时序特征提取器以得到训练车速时序特征向量;使用所述特征间注意力层来对所述训练车距时序特征向量和所述训练车速时序特征向量进行基于注意力机制的特征交互以得到训练车距-车速时序交互特征向量;将所述训练车距-车速时序交互特征向量通过分类器以得到分类损失函数值;以及以所述分类损失函数值来对所述包含上采样层和一维卷积层的车距时序特征提取器、所述包含上采样层和一维卷积层的车辆速度时序特征提取器、所述特征间注意力层和所述分类器进行训练,其中,在所述训练的每一轮迭代中,对所述训练车距-车速时序交互特征向量进行基于类度矩阵正则化的权重空间探索约束迭代。
8.根据权利要求7所述的基于深度学习算法的自动驾驶安全控制方法,其特征在于,在所述训练的每一轮迭代中,对所述训练车距-车速时序交互特征向量进行基于类度矩阵正则化的权重空间探索约束迭代,包括:以如下优化公式对所述训练车距-车速时序交互特征向量进行基于类度矩阵正则化的权重空间探索约束迭代以得到优化训练车距-车速时序交互特征向量;其中,所述优化公式为:其中,是所述训练车距-车速时序交互特征向量,且为列向量,表示矩阵乘法,表示上一次迭代的权重矩阵,表示所述优化训练车距-车速时序交互特征向量,是行向量,为可学习的域转移矩阵,表示迭代后的权重矩阵。
9.一种基于深度学习算法的自动驾驶安全控制系统,其特征在于,包括:车距值获取模块,用于获取由部署于车辆的激光测距仪采集的预定时间段内多个预定时间点的车距值;速度值获取模块,用于获取由部署于所述车辆的速度传感器采集的所述多个预定时间点的车辆速度值;联合分析模块,用于对所述多个预定时间点的车距值和所述多个预定时间点的车辆速度值进行联合分析以得到车距-车速时序交互特征向量;以及提示确认模块,用于基于所述车距-车速时序交互特征向量,确定是否产生碰撞预警提示。
10.根据权利要求9所述的基于深度学习算法的自动驾驶安全控制系统,其特征在于,所述联合分析模块,包括:车距时序特征提取单元,用于提取所述多个预定时间点的车距值的车距时序特征以得到车距时序特征向量;车速时序特征提取单元,用于提取所述多个预定时间点的车辆速度值的车速时序特征以得到车速时序特征向量;以及融合单元,用于融合所述车距时序特征向量和所述车速时序特征向量以得到所述车距-车速时序交互特征向量。
技术总结
公开了一种基于深度学习算法的自动驾驶安全控制系统及方法。其首先获取由部署于车辆的激光测距仪采集的预定时间段内多个预定时间点的车距值,接着,获取由部署于所述车辆的速度传感器采集的所述多个预定时间点的车辆速度值,然后,对所述多个预定时间点的车距值和所述多个预定时间点的车辆速度值进行联合分析以得到车距‑车速时序交互特征向量,最后,基于所述车距‑车速时序交互特征向量,确定是否产生碰撞预警提示。这样,可以结合深度学习算法,自动化地判断是否产生碰撞预警提示,以避免发生危险情况。
技术研发人员:胡斌,庄杰,谢孟思,徐贵亮,方建勇,林培松,李源,李小勤,苏越,林彩虹,谢苏梅
受保护的技术使用者:深圳市交投科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!