车辆控制装置的制作方法
本发明涉及一种车辆控制装置。
背景技术:
1、日本未审查专利申请公开第2020-32894号(jp 2020-32894a)描述了一种车辆控制装置。一种控制装置,包括运动管理器。运动管理器包括接收单元、仲裁单元和生成单元。接收单元接收来自多个应用程序的运动请求。仲裁单元对由接收单元接收的多个运动请求进行仲裁。生成单元基于仲裁单元的仲裁结果生成例如要输出到制动控制单元和动力传动控制单元的工作请求的指令值。
2、例如在jp 2020-32894a中描述的车辆控制装置可以执行所谓的反馈控制。例如,控制装置基于四个轮速传感器的检测值中的一个来计算车辆如何移动。然后,控制装置对工作请求的指令值执行反馈控制,使得车辆的实际运动与来自应用程序的运动请求相匹配。在这种情况下,当四个轮速传感器中的一个发生故障时,发生故障的轮速传感器的检测值可能太大或太小。因此,当基于发生故障的轮速传感器的检测值来计算车辆如何移动时,存在不能通过反馈控制来适当地控制工作请求的指令值的可能性。
技术实现思路
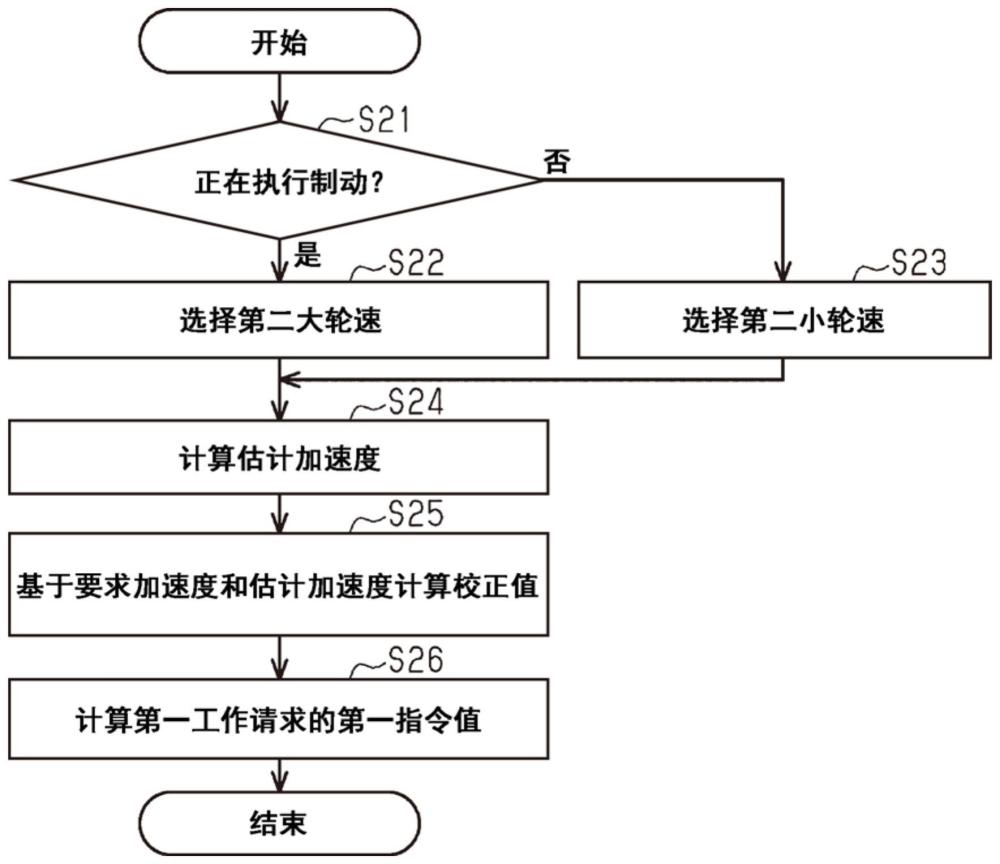
1、根据本公开的一个方案,车辆控制装置包括一个以上的处理器。所述一个以上的处理器被配置为:基于来自应用程序的运动请求,计算用于控制安装在车辆上的致动器的工作的工作请求的第一指令值;以及使用所述运动请求与所述车辆的运动结果之间的偏差,对所述第一指令值执行反馈控制,所述运动结果基于四个轮速传感器的检测值中的一个计算出的。所述一个以上的处理器进一步被配置为:当所述车辆被制动时,基于第一检测值来计算所述反馈控制中的所述运动结果,所述第一检测值指示由所述四个轮速传感器的检测值所指示的车身速度中的第二大车身速度;并且当所述车辆未被制动时,基于第二检测值来计算所述反馈控制中的所述运动结果,所述第二检测值指示由所述四个轮速传感器的所述检测值所指示的所述车身速度中的第二小车身速度。
2、根据上述配置,当车辆被制动时,一个以上的处理器基于指示四个轮速传感器的检测值所指示的车身速度中的第二大车身速度的轮速传感器的检测值来计算反馈控制中的运动结果。假设四个轮速传感器中的一个发生故障,并且发生故障的轮速传感器的检测值变成过大的值。即使在这种情况下,也基于指示在具有过大的值的轮速传感器之后的次大车身速度的轮速传感器的检测值来计算运动结果。因此,可以抑制计算出的运动结果偏离实际运动结果。
3、此外,根据上述配置,当车辆未被制动时,一个以上的处理器基于指示四个轮速传感器的检测值所指示的车身速度中的第二小车身速度的轮速传感器的检测值来计算反馈控制中的运动结果。假设四个轮速传感器中的一个发生故障,并且发生故障的轮速传感器的检测值变成过小的值。即使在这种情况下,也基于指示在具有过小的值的轮速传感器之后的次小车身速度的轮速传感器的检测值来计算运动结果。因此,可以抑制计算出的运动结果偏离实际运动结果。
技术特征:
1.一种车辆控制装置,其特征在于,包括:
2.根据权利要求1所述的车辆控制装置,其特征在于,包括:
3.根据权利要求1所述的车辆控制装置,其特征在于:
4.根据权利要求1所述的车辆控制装置,其特征在于,所述一个以上的处理器进一步被配置为:
5.根据权利要求4所述的车辆控制装置,其特征在于,包括:
技术总结
一种车辆控制装置,包括处理器。处理器基于来自应用程序的运动请求来计算用于控制安装在车辆上的致动器的工作的工作请求的指令值。处理器使用运动请求和基于四个轮速传感器的检测值之一计算出的车辆的运动结果之间的偏差来对指令值执行反馈控制。当车辆被制动时,处理器基于指示由四个轮速传感器的检测值指示的车身速度中的第二大车身速度的检测值来计算反馈控制中的运动结果。
技术研发人员:大桥祐太,谷本充隆,加藤英九,大坪道弘
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!