一种工业车辆控制方法、控制装置及动力系统与流程
本发明涉及车辆控制,尤其涉及一种工业车辆控制方法、控制装置及动力系统。
背景技术:
1、工业车辆的电动控制,一般为速度和电流双闭环控制,即包括速度闭环控制器和电流闭环控制器。在获取到加速器的状态后,根据加速器状态对应的目标转速控制速度闭环控制器的输出,速度闭环控制器输出电流控制指令至电流闭环控制器,使得电流闭环控制器输出目标电压值至电机,使得电机达到加速器状态对应的目标转速。
2、速度闭环控制器和电流闭环控制器例如为比例积分控制器,比例项表示调节的误差,也就是说目标转速与实际转速的误差,积分项表示调节的误差累积。在加速器为释放状态时,目标转速为零,当电机转速变为零时,目标转速与实际转速相等,速度闭环控制器的比例项为零。
3、但是在调节的过程中,随着误差的累积,在电机转速变为零时,积分项的累积不合适时,可能会导致车辆在平地上停车时倒转。若直接消除积分项,导致车辆在坡道上无法克服重力势能而下滑,若消除积分项后再重新启动积分项,可能会导致车辆下滑一段距离后才能维持驻坡。这对于停车控制精度要求较高的车辆来说是不满足需求的。
技术实现思路
1、本发明提供了一种工业车辆控制方法、控制装置及动力系统,以解决无法控制车辆精准停车的问题。
2、根据本发明的一方面,提供了一种工业车辆控制方法,工业车辆控制方法包括:
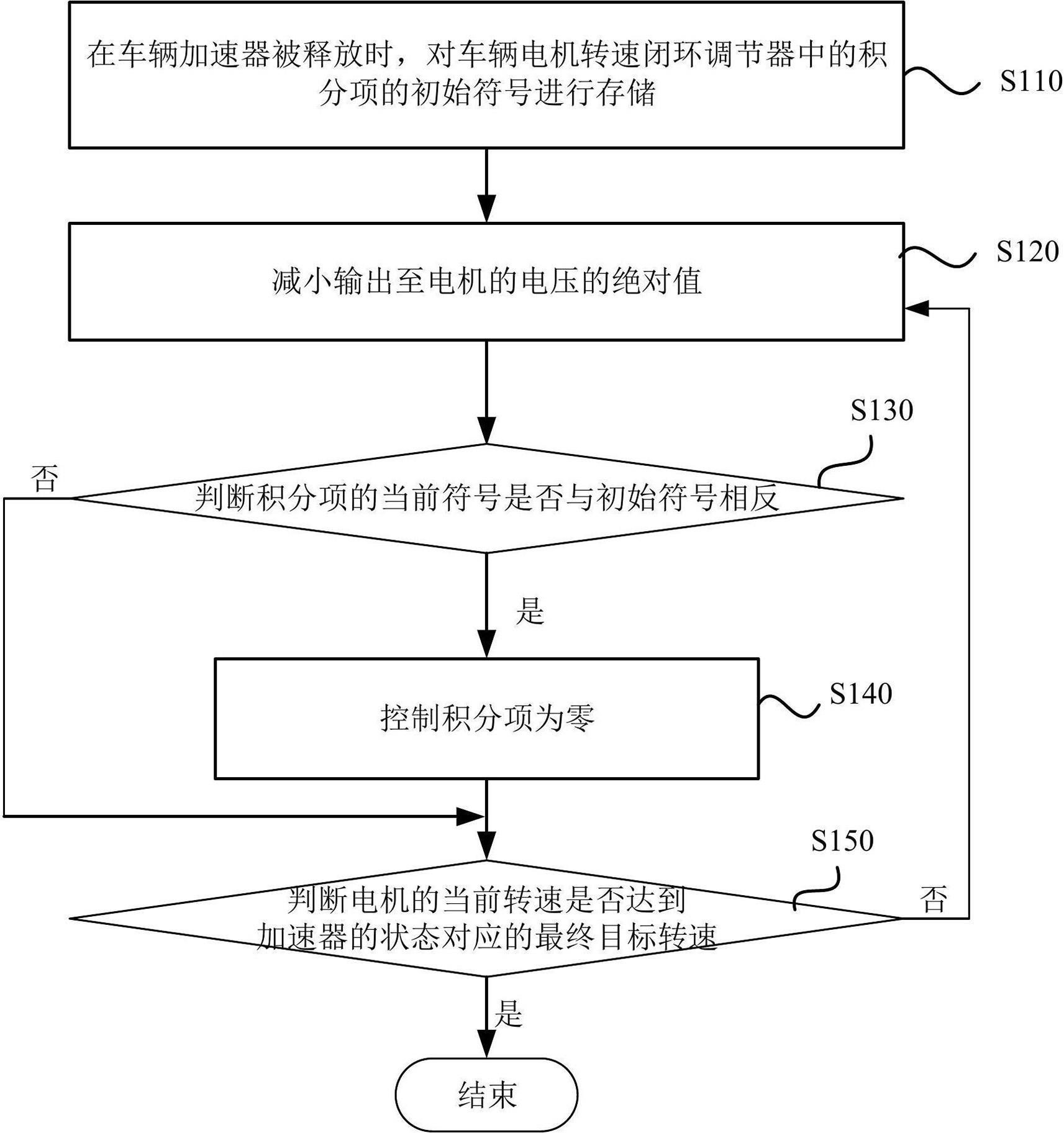
3、在车辆加速器被释放时,对车辆电机转速闭环调节器中的积分项的初始符号进行存储;其中,所述转速闭环调节器为比例积分调节器;所述符号包括正号或负号;
4、减小输出至所述电机的电压的绝对值;
5、若所述积分项的当前符号与所述初始符号相反,则控制所述积分项为零,并返回执行减小输出至所述电机的电压的绝对值的步骤,直至所述电机的当前转速达到所述加速器的状态对应的最终目标转速;
6、若所述积分项的当前符号与所述初始符号相同,则返回执行减小输出至所述电机的电压的绝对值的步骤,直至所述电机的当前转速达到所述加速器的状态对应的最终目标转速。
7、可选地,在所述电机的当前转速达到所述加速器的状态对应的最终目标转速之后,还包括:
8、控制电机的电磁刹车释放,并关闭所述电机。
9、可选地,所述控制所述积分项为零,包括:
10、控制所述积分项的积分系数为零,并控制所述积分项的绝对值减小为零。
11、可选地,所述控制所述积分项的绝对值减小为零,包括:
12、根据所述积分项的当前值与第一预设时长确定步进值;
13、根据所述步进值逐步减小所述积分项的绝对值,直至所述积分项的绝对值减小为零。
14、可选地,所述减小输出至所述电机的电压的绝对值,包括:
15、减小所述转速闭环调节器的输出值的绝对值;
16、将所述输出值输出至所述电机的电流闭环调节器,得到所述输出值对应的电压值,以减小输出至所述电机的电压的绝对值。
17、可选地,减小所述转速闭环调节器的输出值的绝对值,包括:
18、根据所述加速器的状态对应的最终目标转速确定当前目标转速;
19、根据所述当前目标转速调节所述转速闭环调节器的积分项,以减小所述转速闭环调节器的输出值的绝对值。
20、可选地,在所述控制所述积分项为零之后,还包括:
21、在所述电机的当前转速的绝对值小于或等于转速阈值时,或者,在所述电机的当前目标转速为零时,控制所述积分项不为零。
22、可选地,所述控制所述积分项不为零,包括:
23、设定所述积分项的积分系数为预设值,以使所述积分项不为零。
24、根据本发明的另一方面,提供了一种工业车辆控制装置,所述工业车辆控制装置用于执行本发明任一实施例所述的工业车辆控制方法;所述工业车辆控制装置包括:
25、初始符号存储模块,用于在车辆加速器被释放时,对车辆电机转速闭环调节器中的积分项的初始符号进行存储;其中,所述转速闭环调节器为比例积分调节器;所述符号包括正号或负号;
26、减速模块,用于减小输出至所述电机的电压的绝对值;
27、积分项消除模块,用于若所述积分项的当前符号与所述初始符号相反,则控制所述积分项为零。
28、根据本发明的另一方面,提供了一种工业车辆动力系统,工业车辆动力系统包括电池组、电机和控制器;所述控制器包括本发明任一实施例所述的工业车辆控制装置;所述控制器连接于车辆的电池组与车辆的电机之间。
29、本发明实施例的技术方案,通过在车辆加速器释放后,车辆开始减速后,若电机的速度比例积分调节器中的积分项的当前符号与初始符号相反,则控制积分项为零,使得累积的积分项消除,即当比例项为零时,积分项也为零,使得速度比例积分调节器的输出值为零,进而输出至电机的电压为零,电机停转,实现在平地上准确稳定的停车。当车辆在坡道上停车时,积分项要克服整车自重产生的下滑力,也就是说积分项使得速度比例积分调节器的输出值较大,使得电流比例调节器对应的输出至电机的电压较大,使得电机的转矩可以克服车辆重力,所以积分项的符号相对初始符号不会变化。通过对积分项的符号进行判断,可以避免车辆在坡道上停车时,对积分项进行消除,即车辆在坡道上停车时一直保留积分项,而不是消除积分项后待车辆滑行一段距离或者具有一定的下滑速度时才启动积分项,因此不会导致车辆下滑后再驻坡的问题,避免车辆出现顿挫感,从而可以实现准确驻坡,有利于对驻坡控制精度要求高的车辆进行控制,也可以应用于一般的工业车辆(如叉车或装载机等),提高停车控制的精度。本发明实施例的技术方案实现了在坡道上精准停车,避免出现下滑后再驻坡的问题。
30、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种工业车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述电机的当前转速达到所述加速器的状态对应的最终目标转速之后,还包括:
3.根据权利要求1所述的方法,其特征在于,所述控制所述积分项为零,包括:
4.根据权利要求3所述的方法,其特征在于,所述控制所述积分项的绝对值减小为零,包括:
5.根据权利要求1所述的方法,其特征在于,所述减小输出至所述电机的电压的绝对值,包括:
6.根据权利要求5所述的方法,其特征在于,减小所述转速闭环调节器的输出值的绝对值,包括:
7.根据权利要求1所述的方法,其特征在于,在所述控制所述积分项为零之后,还包括:
8.根据权利要求7所述的方法,其特征在于,所述控制所述积分项不为零,包括:
9.一种工业车辆控制装置,其特征在于,所述工业车辆控制装置用于执行权利要求1-8任一项所述的工业车辆控制方法;所述工业车辆控制装置包括:
10.一种工业车辆动力系统,其特征在于,包括电池组、电机和控制器;所述控制器包括权利要求9所述的工业车辆控制装置;所述控制器连接于车辆的电池组与车辆的电机之间。
技术总结
本发明公开了一种工业车辆控制方法、控制装置及动力系统。该控制方法包括:在车辆加速器被释放时,对车辆电机转速闭环调节器中的积分项的初始符号进行存储;其中,转速闭环调节器为比例积分调节器;符号包括正号或负号;减小输出至电机的电压的绝对值;若积分项的当前符号与初始符号相反,则控制积分项为零,并返回执行减小输出至电机的电压的绝对值的步骤,直至电机的当前转速达到加速器的状态对应的最终目标转速;若积分项的当前符号与初始符号相同,则返回执行减小输出至电机的电压的绝对值的步骤,直至电机的当前转速达到加速器的状态对应的最终目标转速。本发明实施例的技术方案实现了在坡道上精准停车,避免出现下滑后再驻坡的问题。
技术研发人员:李宇虹,张平化,孟凡己
受保护的技术使用者:凡己科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!