基于倾角监测的车速控制方法及其系统与流程
本发明涉及智能化车速控制,尤其涉及一种基于倾角监测的车速控制方法及其系统。
背景技术:
1、叉车是一种常用的物流运输工具,它可以在不同的地形和坡度上搬运货物。在叉车的爬坡搬运过程中,车辆受到斜坡的阻力,需要克服重力和摩擦力的作用,保持稳定。过高的车速可能导致车辆失控、侧翻或制动失效等安全问题。同时,过高的车速会导致电机承受更大的负荷,增加能耗并缩短电池寿命。而车速过慢会延长搬运时间,降低叉车的工作效率。
2、目前,许多叉车使用固定的速度设置进行搬运操作,无法根据实际情况进行动态调整。又或者,叉车的车速控制依赖于技术人员的经验,缺乏科学的依据,这种方法容易导致速度过高或过低,无法实现最佳的能耗和电机电池保护效果。因此,期待一种优化的车速控制方案。
技术实现思路
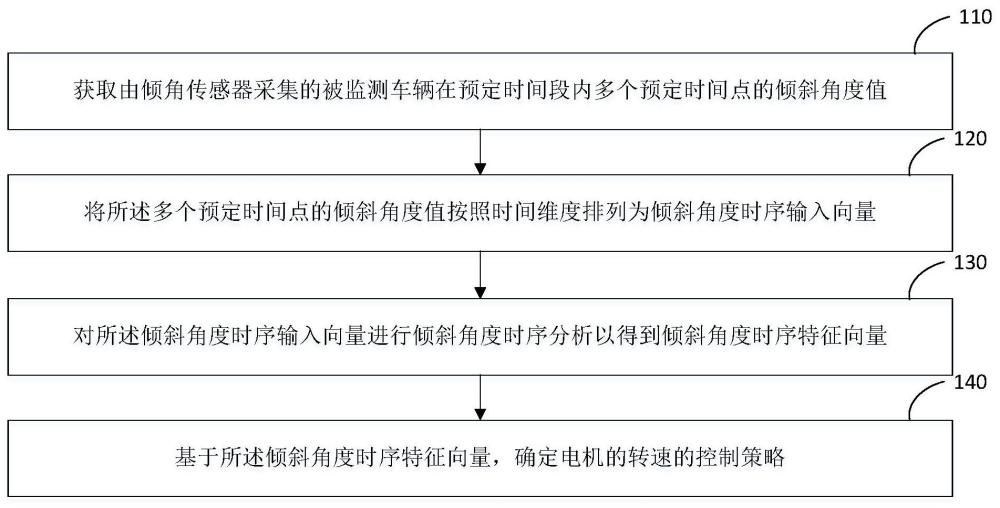
1、本发明实施例提供一种基于倾角监测的车速控制方法及其系统,其获取由倾角传感器采集的被监测车辆在预定时间段内多个预定时间点的倾斜角度值;将所述多个预定时间点的倾斜角度值按照时间维度排列为倾斜角度时序输入向量;对所述倾斜角度时序输入向量进行倾斜角度时序分析以得到倾斜角度时序特征向量;以及,基于所述倾斜角度时序特征向量,确定电机的转速的控制策略。这样,可以自适应地控制车辆的电机转速,进而调整车辆的速度。
2、本发明实施例还提供了一种基于倾角监测的车速控制方法,其包括:
3、获取由倾角传感器采集的被监测车辆在预定时间段内多个预定时间点的倾斜角度值;
4、将所述多个预定时间点的倾斜角度值按照时间维度排列为倾斜角度时序输入向量;
5、对所述倾斜角度时序输入向量进行倾斜角度时序分析以得到倾斜角度时序特征向量;以及
6、基于所述倾斜角度时序特征向量,确定电机的转速的控制策略。
7、本发明实施例还提供了一种基于倾角监测的车速控制系统,其包括:
8、数据获取模块,用于获取由倾角传感器采集的被监测车辆在预定时间段内多个预定时间点的倾斜角度值;
9、向量排列模块,用于将所述多个预定时间点的倾斜角度值按照时间维度排列为倾斜角度时序输入向量;
10、倾斜角度时序分析模块,用于对所述倾斜角度时序输入向量进行倾斜角度时序分析以得到倾斜角度时序特征向量;以及
11、控制策略确定模块,用于基于所述倾斜角度时序特征向量,确定电机的转速的控制策略。
技术特征:
1.一种基于倾角监测的车速控制方法,其特征在于,包括:
2.根据权利要求1所述的基于倾角监测的车速控制方法,其特征在于,对所述倾斜角度时序输入向量进行倾斜角度时序分析以得到倾斜角度时序特征向量,包括:
3.根据权利要求2所述的基于倾角监测的车速控制方法,其特征在于,将所述倾斜角度时序输入向量通过向量-图像转换模块以得到倾斜角度时序图像,包括:
4.根据权利要求3所述的基于倾角监测的车速控制方法,其特征在于,对所述倾斜角度时序图像进行图像特征提取以得到所述倾斜角度时序特征向量,包括:
5.根据权利要求4所述的基于倾角监测的车速控制方法,其特征在于,所述卷积神经网络模型包括输入层、卷积层、池化层、激活层和输出层。
6.根据权利要求5所述的基于倾角监测的车速控制方法,其特征在于,基于所述倾斜角度时序特征向量,确定电机的转速的控制策略,包括:
7.根据权利要求6所述的基于倾角监测的车速控制方法,其特征在于,还包括训练步骤:对所述向量-图像转换模块、所述基于卷积神经网络模型的倾斜角度时序特征提取器、所述基于bi-lstm模型的特征去噪器和所述分类器进行训练;
8.一种基于倾角监测的车速控制系统,其特征在于,包括:
9.根据权利要求8所述的基于倾角监测的车速控制系统,其特征在于,所述倾斜角度时序分析模块,包括:
10.根据权利要求9所述的基于倾角监测的车速控制系统,其特征在于,所述向量-图像转换单元,包括:
技术总结
本发明公开了一种基于倾角监测的车速控制方法及其系统,其获取由倾角传感器采集的被监测车辆在预定时间段内多个预定时间点的倾斜角度值;将所述多个预定时间点的倾斜角度值按照时间维度排列为倾斜角度时序输入向量;对所述倾斜角度时序输入向量进行倾斜角度时序分析以得到倾斜角度时序特征向量;以及,基于所述倾斜角度时序特征向量,确定电机的转速的控制策略。这样,可以自适应地控制车辆的电机转速,进而调整车辆的速度。
技术研发人员:张汉章,戴肖肖,蒋连杰,陈春喜,李博文,沈培彦,王鑫
受保护的技术使用者:浙江加力仓储设备股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!