一种矿山用巡检机器人的制作方法
本发明涉及巡检机器人,具体说是一种矿山用巡检机器人。
背景技术:
1、矿井是形成地下煤矿生产系统的井巷、硐室、装备、地面建筑物和构筑物的总称。有时把矿山地下开拓中的斜井、竖井、平硐等也称为矿井。每一个矿井的井田范围大小、矿井生产能力和服务年限的确定,是矿井整体设计中必须解决好的关键问题之一。
2、矿井井巷主要包括:直立巷道、水平巷道、倾斜巷道、硐室;直立巷道的长轴线与水平面垂直,如立井、暗立井和溜井。水平巷道的长轴线与水平面近似平行,如平硐、 平巷和石门等。倾斜巷道的长轴线与水平面有一定夹角,如斜井、上山、下山和分带斜巷等。硐室:有专门用途、在井下开凿和建造的断面较大且长度较短的空间构筑物,如绞车房、水 泵房、变电所和煤仓等。
3、在煤矿井下特殊环境下,矿井空气的成分和质量发生了变化,煤尘和其他可燃气体的混入量不同,空气温度也有较大差异,这些影响因素都可能使甲烷爆炸。
4、在进行井下作业的过程中同时需要对井下进行巡检,检测气体中甲烷的含量,以保证井下的安全,但是在倾斜巷道上进行巡检时,倾斜巷道的表面上可能会存在有较多的煤块,影响到巡检装置的正常行驶,专利公告号为cn115297251b的中国专利公开了一种煤矿井下巡检机器人用监控装置,存在监控范围有限的问题,具有一定的局限性,专利公告号为cn 213424020u的专利公开了一种基于5g技术的煤矿井下用移动巡检装置,够在矿井下进行自由移动,但是当遇到较大的煤块沿倾斜巷道滚落时,该装置可能直接会被煤块正面撞击,造成内部元件的损坏。
技术实现思路
1、针对现有技术中的问题,本发明提供了一种矿山用巡检机器人,目的在于解决既能够较大范围的进行矿井内进行检测,同时在倾斜巷道遇到滚落煤块时还能够进行及时的保护的问题。
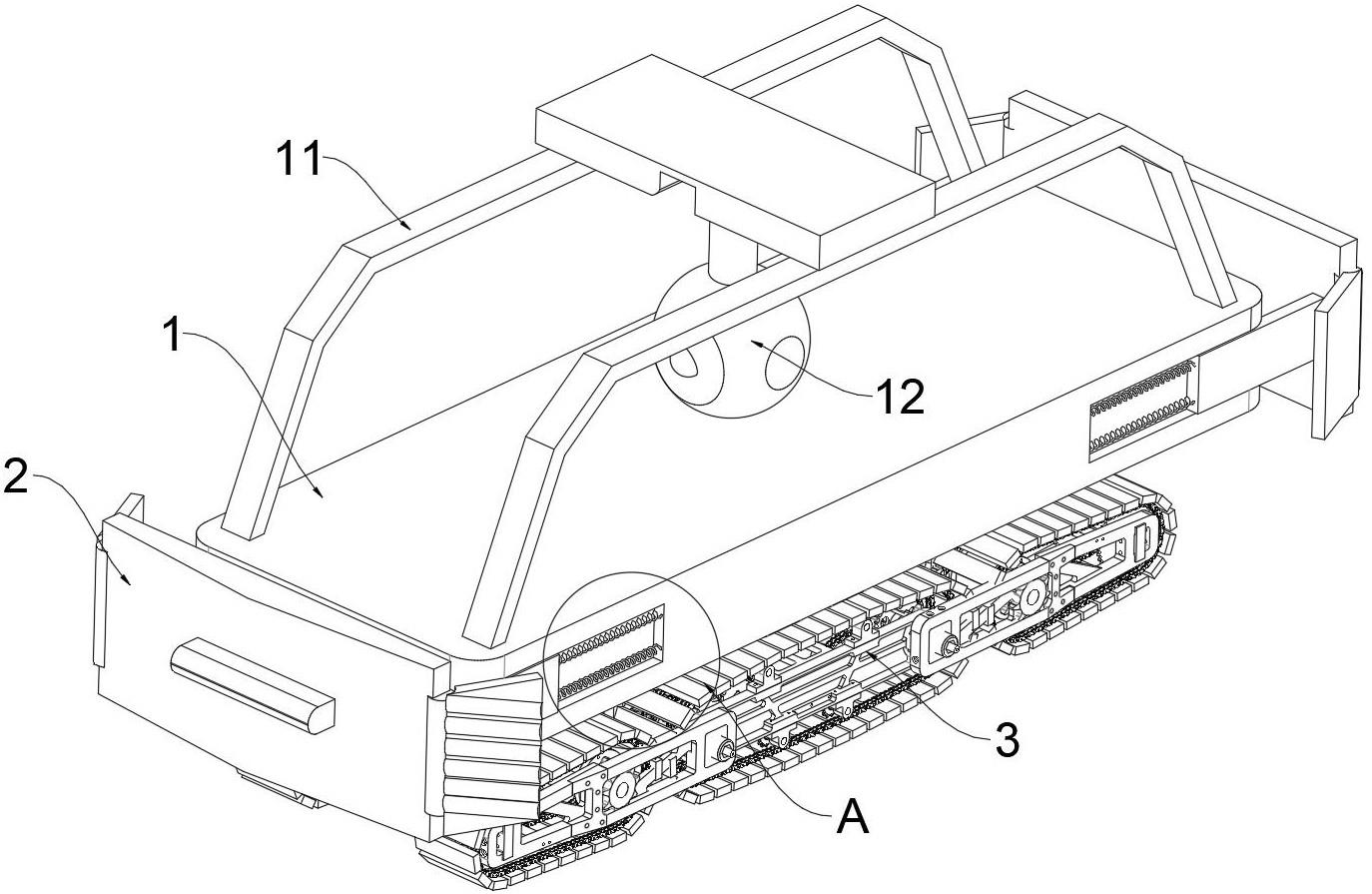
2、本发明解决其技术问题所采用的技术方案是:一种矿山用巡检机器人,包括移动车架,所述移动车架上表面固定连接有安装架,所述安装架的中部安装有检测探头,所述移动车架的前后两端均设置有防撞组件,所述移动车架的底部设置有移动组件;
3、所述防撞组件包括推板,所述推板靠近移动车架的一侧固定连接有两个缓冲横杆,所述缓冲横杆靠近移动车架的端设置有倾斜的摩擦斜面,所述移动车架的两侧设置有限位槽,所述缓冲横杆滑动插接在限位槽内,所述限位槽内壁固定连接有缓冲弹簧的一端,所述缓冲弹簧的另一端固定连接在缓冲横杆的侧壁。
4、具体的,所述推板的中部厚边缘薄设置,所述推板远离缓冲横杆的一侧中部为突出部,所述推板的中部开设有水平方向的滑动槽,所述滑动槽内设置有滑动板。
5、具体的,所述推板的两端均转动连接有连接转柱,所述连接转柱的外部固定连接有侧板,两个侧板相对侧设置有让位弹簧,所述让位弹簧的端部固定连接在侧板的内壁。
6、具体的,所述滑动板贯穿滑动槽,所述滑动板靠近让位弹簧的一端与让位弹簧的中部抵紧设置。
7、具体的,所述侧板的外壁固定连接有多个导向杆,所述导向杆呈半圆柱设置,且同一根所述导向杆靠近连接转柱的一端高于导向杆的另一端。
8、具体的,所述缓冲横杆的外壁开设有抵紧孔,所述抵紧孔内滑动连接有滑动杆,所述滑动杆靠近限位槽内壁的一端固定连接有抵紧摩擦片,所述抵紧摩擦片与限位槽内壁接触。
9、具体的,所述滑动杆远离抵紧摩擦片的一侧固定连接有限位板,所述滑动杆的外壁套设有拉紧弹簧,所述拉紧弹簧的一端固定连接在缓冲横杆的侧壁,所述拉紧弹簧的另一端外壁固定连接在限位板的侧壁。
10、具体的,所述限位板可与侧板的内壁接触。
11、具体的,所述移动组件包括主链轮和辅链轮,所述主链轮和辅链轮通过转动连接架连接,所述主链轮的外侧设置有调节转轴,所述转动连接架转动连接在调节转轴的外壁。
12、本发明的有益效果:
13、(1)本发明所述的一种矿山用巡检机器人,当该装置行驶到倾斜巷道向上行驶时,当遇到从倾斜巷道上滑下的小型煤块时,煤块会撞击到推板一侧的斜面上,推板受到撞击力后,首先会向靠近移动车架的方向进行移动,此过程中推板会推动缓冲横杆同步进行移动,起到缓冲的效果,避免煤块直接撞击到移动车架,造成该装置的损坏,在缓冲横杆沿限位槽内壁滑动的过程中缓冲弹簧会被压缩,进一步的起到缓冲的效果,保证移动车架以及安装的检测元件的不被直接撞击。
14、(2)本发明所述的一种矿山用巡检机器人,缓冲横杆置于限位槽内的一端设置有摩擦斜面,缓冲横杆进入到限位槽内的长度越长,摩擦斜面与限位槽内壁之间的挤压越大,从而摩擦力也就越大,使得撞击产生的力转化成摩擦力,起到撞击过程中对移动车架的缓冲作用。
15、(3)本发明所述的一种矿山用巡检机器人,推板一侧的斜面上能够对撞击的煤块起到导向作用,煤块能沿推板一侧的斜面滑到推板的两侧,避免在煤块撞击到推板后依然堆积在推板的前侧,影响到该装置的前进,同时通过推板的前侧成斜面设置,还能将堆积在推板行进路线上的煤块在该装置行进的过程中推至推板的两侧,有利于该装置的移动。
16、(4)本发明所述的一种矿山用巡检机器人,通过限位板推动侧板向远离缓冲横杆的方向进行转动,限位板在转动时能够将置于该装置两侧的煤块向两侧推动,提前对前进时的路径进行清理,从而有利于该装置的移动。侧板侧壁设置的导向杆呈倾斜设置起到导向作用,块状的煤块在该装置前进的过程中能够沿导向杆向两侧移动,避免前进路径中煤块堆积,影响到该装置的行驶。
17、(5)本发明所述的一种矿山用巡检机器人,当前进的路径倾斜角度出现变化时,辅链轮先与斜面接触,在主链轮前进的过程中转动连接架会转动跟随路径的倾角转动一定的角度,使得辅链轮与路面进行贴合,使得该装置移动过程中更加的稳定,避免在该装置移动到倾斜角度不同的路面时出现剧烈晃动或者倾倒的现象,同时能够使得该装置适应不通过的路况。
技术特征:
1.一种矿山用巡检机器人,包括移动车架(1),所述移动车架(1)上表面固定连接有安装架(11),所述安装架(11)的中部安装有检测探头(12),其特征在于:所述移动车架(1)的前后两端均设置有防撞组件(2),所述移动车架(1)的底部设置有移动组件(3),其中,
2.根据权利要求1所述的一种矿山用巡检机器人,其特征在于:所述推板(22)的中部厚边缘薄设置,所述推板(22)远离缓冲横杆(21)的一侧中部为突出部,所述推板(22)的中部开设有水平方向的滑动槽,所述滑动槽内设置有滑动板(24)。
3.根据权利要求2所述的一种矿山用巡检机器人,其特征在于:所述推板(22)的两端均转动连接有连接转柱(232),所述连接转柱(232)的外部固定连接有侧板(23),两个侧板(23)相对侧设置有让位弹簧(25),所述让位弹簧(25)的端部固定连接在侧板(23)的内壁。
4.根据权利要求3所述的一种矿山用巡检机器人,其特征在于:所述滑动板(24)贯穿滑动槽,所述滑动板(24)靠近让位弹簧(25)的一端与让位弹簧(25)的中部抵紧设置。
5.根据权利要求4所述的一种矿山用巡检机器人,其特征在于:所述侧板(23)的外壁固定连接有多个导向杆(231),所述导向杆(231)呈半圆柱设置,且同一根所述导向杆(231)靠近连接转柱(232)的一端高于导向杆(231)的另一端。
6.根据权利要求5所述的一种矿山用巡检机器人,其特征在于:所述缓冲横杆(21)的外壁开设有抵紧孔,所述抵紧孔内滑动连接有滑动杆(27),所述滑动杆(27)靠近限位槽(13)内壁的一端固定连接有抵紧摩擦片(20),所述抵紧摩擦片(20)与限位槽(13)内壁接触。
7.根据权利要求6所述的一种矿山用巡检机器人,其特征在于:所述滑动杆(27)远离抵紧摩擦片(20)的一侧固定连接有限位板(28),所述滑动杆(27)的外壁套设有拉紧弹簧(29),所述拉紧弹簧(29)的一端固定连接在缓冲横杆(21)的侧壁,所述拉紧弹簧(29)的另一端外壁固定连接在限位板(28)的侧壁。
8.根据权利要求7所述的一种矿山用巡检机器人,其特征在于:所述限位板(28)可与侧板(23)的内壁接触。
9.根据权利要求1所述的一种矿山用巡检机器人,其特征在于:所述移动组件(3)包括主链轮(31)和辅链轮(33),所述主链轮(31)和辅链轮(33)通过转动连接架(32)连接,所述主链轮(31)的外侧设置有调节转轴(34),所述转动连接架(32)转动连接在调节转轴(34)的外壁。
技术总结
本发明涉及巡检机器人技术领域,具体的说是一种矿山用巡检机器人,包括移动车架,所述移动车架上表面固定连接有安装架,所述安装架的中部安装有检测探头,所述移动车架的前后两端均设置有防撞组件;所述移动车架的底部设置有移动组件,煤块会撞击到推板一侧的斜面上,推板受到撞击力后,首先会向靠近移动车架的方向进行移动,此过程中推板会推动缓冲横杆同步进行移动,起到缓冲的效果,避免煤块直接撞击到移动车架,造成该装置的损坏,在缓冲横杆沿限位槽内壁滑动的过程中缓冲弹簧会被压缩,进一步地起到缓冲的效果,保证移动车架以及安装的检测元件的不被直接撞击。
技术研发人员:陈高灿,卢彦,李兵
受保护的技术使用者:合肥小步智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!