一种矿用管道自运载及安装机器人的制作方法
本发明属于煤矿井下辅助作业工程的,具体公开了一种矿用管道自运载及安装机器人。
背景技术:
1、我国煤矿以井工开采为主,其数量约占90%以上,包括采煤工作面和巷道两类空间。目前,采掘工作面初步实现智能化开采,巷道辅助作业装备水平远远落后。
2、巷道辅助作业工程中,管道安装铺设工程量大、转运安装困难且较为关键,是煤矿生产安全运转的咽喉,煤矿开采运转所需的通风、供水、排水、瓦斯抽放等需要大量的管道运输,据不完全统计,我国煤矿每年巷道管道铺设长度超过20000km,施工过程中通常采用平板车或人工扛抬运输,人工现场打设起吊点,采用倒链辅助升降、拉移,施工难度大,作业强度高,安全隐患严重。
技术实现思路
1、本发明提供一种矿用管道自运载及安装机器人,集成管道运输与安装一体化作业,有效降低井下作业人员的负担,提高工作效率及井下安全。
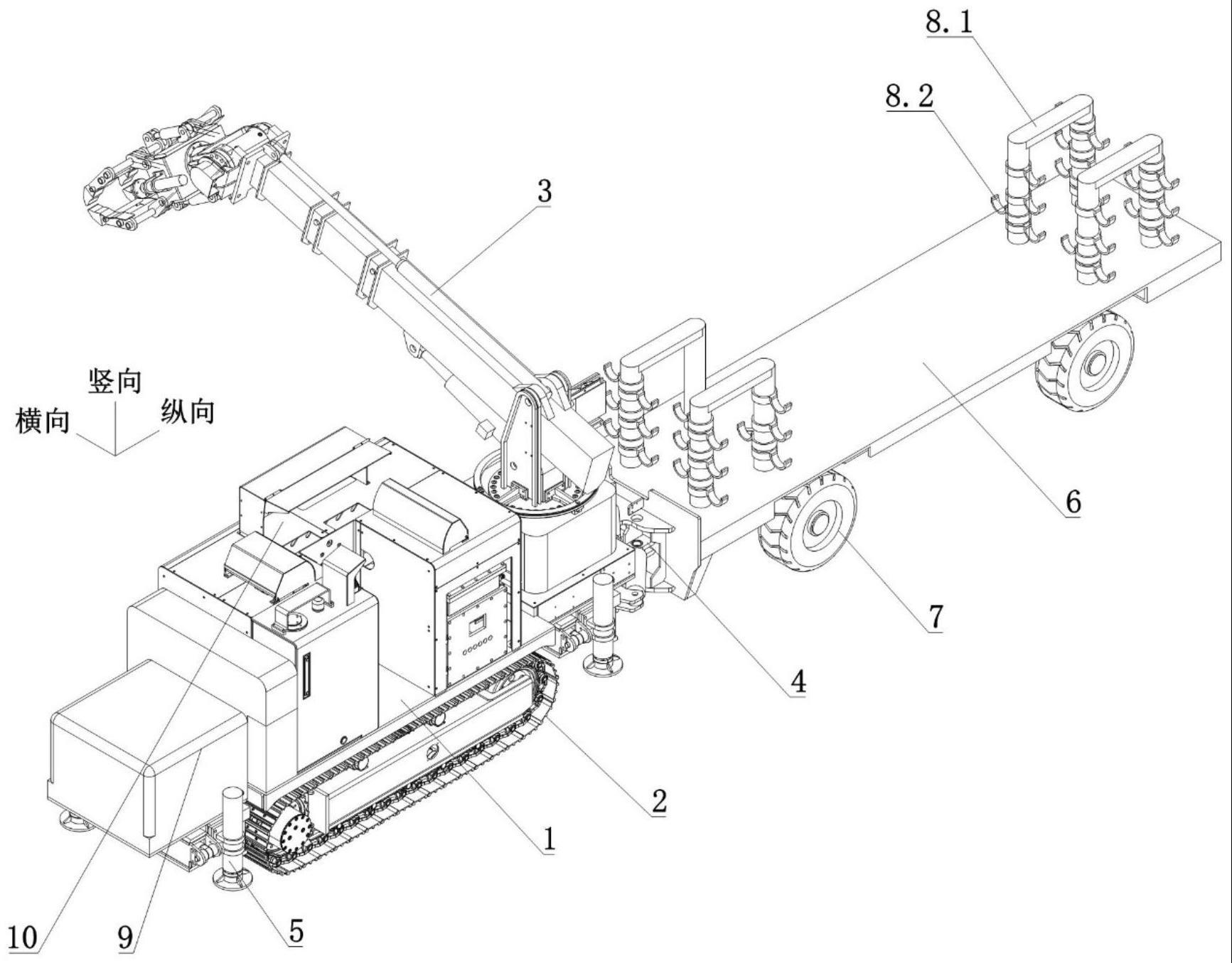
2、上述矿用管道自运载及安装机器人,包括驱动机架、抓举机构、履带行走机构、铰接调向机构、从动机架、轮式行走机构和管道挂载机构;驱动机架的上方安装有抓举机构,下方安装有履带行走机构;抓举机构包括回转底座、伸缩臂和多管径机械手;回转底座安装在驱动机架上,可相对驱动机架水平旋转;伸缩臂安装在回转底座上,可相对于回转底座竖向摆动;多管径机械手安装在伸缩臂的末端;铰接调向机构包括设置在驱动机架后端和从动机架前端的铰接耳板、连接两组铰接耳板的销轴ⅰ以及设置在铰接耳板两侧的调向伸缩件;调向伸缩件的两端分别与驱动机架后端和从动机架前端铰接;从动机架的上方安装有多组管道挂载机构,下方安装有轮式行走机构;每组管道挂载机构均包括挂载柱和挂载钩;挂载柱的底端安装在从动机架上,挂载钩安装在挂载柱上。
3、进一步地,上述矿用管道自运载及安装机器人,还包括位于履带行走机构两侧的支撑腿;支撑腿包括横向伸缩套筒、横向伸缩套筒驱动件、竖向支撑件和支撑底座;横向伸缩套筒的两端分别与驱动机架和竖向支撑件连接,由横向伸缩套筒驱动件驱动伸缩;支撑底座安装在竖向支撑件的底端。
4、进一步地,回转底座包括连接板、回转支撑和连接架;伸缩臂包括伸缩套筒、套筒伸缩驱动件和套筒摆动驱动件;连接板的底面与驱动机架固定连接,顶面与回转支撑的固定环固定连接;连接架的底端与回转支撑的旋转环固定连接,顶端与伸缩套筒通过销轴ⅱ连接;伸缩套筒由套筒伸缩驱动件驱动伸缩,由套筒摆动驱动件驱动绕销轴ⅱ竖向摆动。
5、进一步地,伸缩套筒为双伸缩嵌套滑动结构,包括固定筒、与固定筒连接的一级滑动筒以及与一级滑动筒连接的二级滑动筒;套筒伸缩驱动件和套筒摆动驱动件均为伸缩油缸;套筒伸缩驱动件位于伸缩套筒的内侧或外侧,两端通过销轴分别与固定筒和二级滑动筒连接;套筒摆动驱动件的两端通过销轴分别与固定筒和连接架连接。
6、进一步地,多管径机械手包括夹爪、夹爪驱动件、管道顶紧件、周向摆动架、周向摆动架驱动件、竖向摆动架、竖向摆动架驱动件和固定架;两组夹爪分别与周向摆动架转动连接,且相对设置,由夹爪驱动件驱动相互靠近或远离,夹爪相对的侧面设置有不同弧度的弧段;两组管道顶紧件安装在周向摆动架上,沿管道轴向布置,位于夹爪的两侧;周向摆动架通过周向摆动架驱动件与竖向摆动架连接,由周向摆动架驱动件驱动周向摆动;竖向摆动架通过竖向摆动架驱动件与固定架连接,由竖向摆动架驱动件驱动竖向摆动;固定架安装在二级滑动筒的末端。
7、进一步地,夹爪驱动件为伸缩油缸,两端分别通过销轴与夹爪和周向摆动架连接;管道顶紧件包括伸缩油缸和紧块,伸缩油缸的缸体固定在周向摆动架上,伸缩油缸的活塞端部设置有顶紧块;周向摆动架驱动件为摆动油缸,摆动筒与竖向摆动架连接,活塞杆与周向摆动架连接;竖向摆动架驱动件为摆动油缸,摆动筒与固定架连接,活塞杆与竖向摆动架连接。
8、进一步地,横向伸缩套筒包括相互滑动嵌套的固定套和滑动套,固定套与驱动机架固定连接;横向伸缩套筒驱动件为伸缩油缸,两端通过销轴分别与固定套和滑动套连接;竖向支撑件为伸缩油缸,缸体与横向伸缩套筒的滑动套连接,活塞与支撑底座连接。
9、进一步地,调向伸缩件为伸缩油缸,两端分别通过销轴与驱动机架后端和从动机架前端铰接。
10、进一步地,挂载柱包括纵向梁和两根竖向立柱,两根竖向立柱的底端均与从动机架固定连接,顶端与纵向梁的两端固定连接,每根竖向立柱上均安装有多个挂载钩。
11、进一步地,上述矿用管道自运载及安装机器人,还包括安装在驱动机架上方的液压系统和智能控制系统;液压系统用于提供矿用管道自运载及安装机器人中液压元件所需能源;智能控制系统用于控制矿用管道自运载及安装机器人工作;液压系统、智能控制系统和抓举机构由前到后依次设置在驱动机架上。
12、与现有技术相比,本发明具有以下有益效果。
13、本发明提供的矿用管道自运载及安装机器人适用于煤矿井下水管、风管、瓦斯管等多规格管道的运载、抓举安装作业,具备在狭小巷道内的前后穿梭、转向、全覆盖空间作业、管道装运卸载、多规格管道的识别抓举等功能,可实现在巷道狭窄空间内管道作业“运输—安装”一体化、机械化、自动化和智能化,代替人工管道运输安装作业,提升施工效率,保障施工安全性。
技术特征:
1.一种矿用管道自运载及安装机器人,其特征在于,包括驱动机架、抓举机构、履带行走机构、铰接调向机构、从动机架、轮式行走机构和管道挂载机构;
2.根据权利要求1所述的矿用管道自运载及安装机器人,其特征在于,还包括位于履带行走机构两侧的支撑腿;
3.根据权利要求2所述的矿用管道自运载及安装机器人,其特征在于,回转底座包括连接板、回转支撑和连接架;
4.根据权利要求3所述的矿用管道自运载及安装机器人,其特征在于,所述伸缩套筒为双伸缩嵌套滑动结构,包括固定筒、与固定筒连接的一级滑动筒以及与一级滑动筒连接的二级滑动筒;
5.根据权利要求4所述的矿用管道自运载及安装机器人,其特征在于,多管径机械手包括夹爪、夹爪驱动件、管道顶紧件、周向摆动架、周向摆动架驱动件、竖向摆动架、竖向摆动架驱动件和固定架;
6.根据权利要求5所述的矿用管道自运载及安装机器人,其特征在于,所述夹爪驱动件为伸缩油缸,两端分别通过销轴与夹爪和周向摆动架连接;
7.根据权利要求6所述的矿用管道自运载及安装机器人,其特征在于,横向伸缩套筒包括相互滑动嵌套的固定套和滑动套,固定套与驱动机架固定连接;
8.根据权利要求7所述的矿用管道自运载及安装机器人,其特征在于,调向伸缩件为伸缩油缸,两端分别通过销轴与驱动机架后端和从动机架前端铰接。
9.根据权利要求1所述的矿用管道自运载及安装机器人,其特征在于,挂载柱包括纵向梁和两根竖向立柱,两根竖向立柱的底端均与从动机架固定连接,顶端与纵向梁的两端固定连接,每根竖向立柱上均安装有多个挂载钩。
10.根据权利要求8所述的矿用管道自运载及安装机器人,其特征在于,还包括安装在驱动机架上方的液压系统和智能控制系统;
技术总结
本发明提供了一种矿用管道自运载及安装机器人,属于煤矿井下辅助作业工程的技术领域,包括驱动机架、抓举机构、履带行走机构、铰接调向机构、从动机架、轮式行走机构和管道挂载机构;驱动机架的上方安装有抓举机构,下方安装有履带行走机构;抓举机构包括回转底座、伸缩臂和多管径机械手;铰接调向机构连接驱动机架和从动机架;从动机架的上方安装有多组管道挂载机构,下方安装有轮式行走机构;每组管道挂载机构均包括挂载柱和挂载钩;挂载柱的底端安装在从动机架上,挂载钩安装在挂载柱上。本发明集成管道运输与安装一体化作业,可有效降低井下作业人员的负担,提高工作效率及井下安全。
技术研发人员:闫殿华,李刚,郑毅,宋涛,杨喜,刘玉波,谢学斌,闫飞,朱天龙,李雪霞,杨康信,黄振华,丁守坤,赵鑫,李瑞媛
受保护的技术使用者:山西天地煤机装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!