主动驱动的扭矩控制方法、装置、系统及存储介质与流程
本申请涉及电动车控制,尤其涉及一种主动驱动的扭矩控制方法、装置、系统及存储介质。
背景技术:
1、相关技术中,随着技术的发展,在汽车领域诞生了以电力为动力能源的电动车。电动车的驱动方式,一般是通过控制电机的输出扭矩来进行控制的。具体地,现有的扭矩控制方法,是通过解析驾驶员需求的扭矩最为主要控制思路的。在此种控制方式中,驾驶员需求的扭矩是通过油门来进行读取的,当乘客的数量发生变化时,特别是在乘客数量变多时,要保证相同的车速,驾驶员就需要提供更大的扭矩需求,踩油门就会变得吃力,驾驶员的驾驶体验就会变得很差,长期驾驶就会变得比较费力,降低了驾驶员的驾驶舒适度。因此,如何改善驾驶员的驾驶舒适度,成为了亟待解决的技术问题。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出了一种主动驱动的扭矩控制方法、装置、系统及存储介质,能够基于乘客人数对电动车的电机扭矩进行补偿,从而改善驾驶员的驾驶舒适度。
2、根据本申请第一方面实施例的主动驱动的扭矩控制方法,包括:
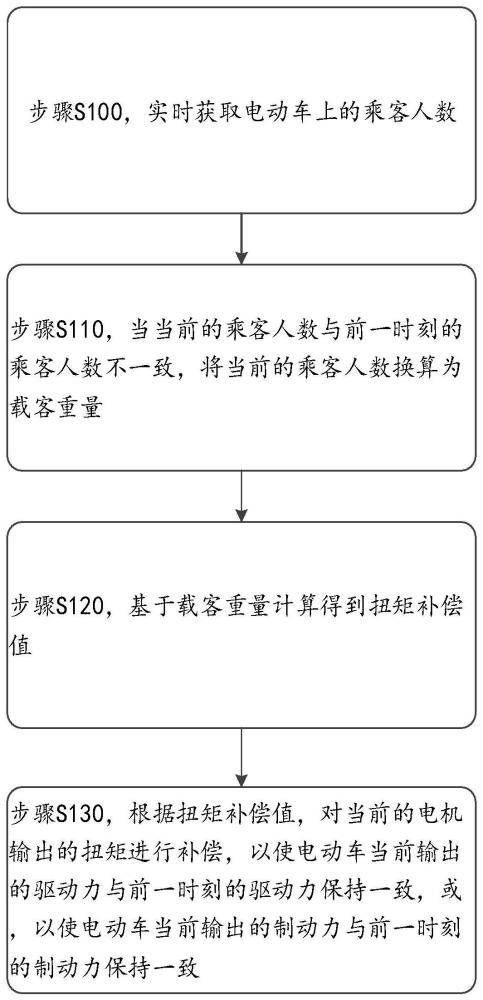
3、实时获取电动车上的乘客人数;
4、当当前的所述乘客人数与前一时刻的所述乘客人数不一致,将当前的所述乘客人数换算为载客重量;
5、基于所述载客重量计算得到扭矩补偿值;
6、根据所述扭矩补偿值,对当前的电机输出的扭矩进行补偿,以使电动车当前输出的驱动力与前一时刻的驱动力保持一致,或,以使电动车当前输出的制动力与前一时刻的制动力保持一致。
7、根据本申请实施例的主动驱动的扭矩控制方法,至少具有如下有益效果:首先,实时获取电动车上的乘客人数;其次,当当前的乘客人数与前一时刻的乘客人数不一致,将当前的乘客人数换算为载客重量;之后,基于载客重量计算得到扭矩补偿值;最后,根据扭矩补偿值,对当前的电机输出的扭矩进行补偿,以使电动车当前输出的驱动力与前一时刻的驱动力保持一致,或,以使电动车当前输出的制动力与前一时刻的制动力保持一致。本申请的主动驱动的扭矩控制方法,通过实时获取乘客人数,当乘客人数有变化时,通过变化后的乘客人数计算载客重量,并根据载客重量计算得到扭矩补偿值,基于扭矩补偿值对电动车输出的扭矩进行补偿,能够使得在乘客人数发生变化的情况下,使得车辆的加速度保持相对稳定,不会因乘客人数的变化引起电动车加速度的大幅变动,从而避免了电动车行驶速度的异常波动,保证了电动车驾驶过程中的稳定性,提高了驾驶员驾驶过程中的舒适度。因此,本申请的主动驱动的扭矩控制方法,能够能够基于乘客人数对电动车的电机扭矩进行补偿,从而改善驾驶员的驾驶舒适度。
8、根据本申请第一方面的一些实施例,所述实时获取电动车上的乘客人数,包括:
9、通过电动车上设置的乘客计数器实时计算所述乘客人数,并接收所述乘客计数器发送的包含所述乘客人数的计数信号;
10、读取所述计数信号,以获取电动车上的所述乘客人数。
11、根据本申请第一方面的一些实施例,所述将当前的所述乘客人数换算为载客重量,包括:
12、将所述乘客人数乘以预设的体重均值,计算得到乘客重量;
13、将所述乘客重量、已计算好的驾驶员重量进行相加,计算得到所述载客重量。
14、根据本申请第一方面的一些实施例,所述基于所述载客重量计算得到扭矩补偿值,包括:
15、通过所述载客重量、以及电动车自身的重量,计算得到车辆总重量;
16、将所述车辆总重量代入车辆行驶阻力公式,计算得到所述扭矩补偿值,其中,所述车辆行驶阻力公式为:
17、fm+fb=ff+fw+fi+fj;
18、其中,ff=g*cosα;fi=g*sinα;fw表示空气阻力;fj表示加速阻力;ɑ表示坡度;g表示车辆总重量对应的重力;cosα表示坡度余弦值;sinα表示坡度正弦值;fm为正值时表示驱动力,为负值时表示制动力;fb表示机械制动力。
19、根据本申请第一方面的一些实施例,所述根据所述扭矩补偿值,对当前的电机输出的扭矩进行补偿,以使电动车当前输出的驱动力与前一时刻的驱动力保持一致,或,以使电动车当前输出的制动力与前一时刻的制动力保持一致,包括:
20、获取驾驶员向油门施加的力所对应的目标扭矩,其中,所述目标扭矩表示为达到目标车速,电动车的电机所输出的扭矩;
21、将所述目标扭矩、所述扭矩补偿值进行相加,计算得到有效扭矩;
22、根据所述有效扭矩对电机输出的扭矩进行控制,以使电动车当前输出的驱动力与前一时刻的驱动力保持一致,或,以使电动车当前输出的制动力与前一时刻的制动力保持一致。
23、根据本申请第二方面实施例的主动驱动的扭矩控制装置,包括:
24、获取模块,用于实时获取电动车上的乘客人数;
25、换算模块,用于当当前的所述乘客人数与前一时刻的所述乘客人数不一致,将当前的所述乘客人数换算为载客重量;
26、计算模块,用于基于所述载客重量计算得到扭矩补偿值;
27、补偿模块,用于根据所述扭矩补偿值,对当前的电机输出的扭矩进行补偿,以使电动车当前输出的驱动力与前一时刻的驱动力保持一致,或,以使电动车当前输出的制动力与前一时刻的制动力保持一致。
28、根据本申请第三方面实施例的主动驱动的扭矩控制系统,包括:
29、至少一个存储器;
30、至少一个处理器;
31、至少一个程序;
32、所述程序被存储在所述存储器中,所述处理器执行至少一个所述程序以实现如第一方面实施例所述的主动驱动的扭矩控制方法。
33、根据本申请第四方面实施例的计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面实施例所述的主动驱动的扭矩控制方法。
34、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.主动驱动的扭矩控制方法,其特征在于,包括:
2.根据权利要求1的主动驱动的扭矩控制方法,其特征在于,所述实时获取电动车上的乘客人数,包括:
3.根据权利要求1的主动驱动的扭矩控制方法,其特征在于,所述将当前的所述乘客人数换算为载客重量,包括:
4.根据权利要求1的主动驱动的扭矩控制方法,其特征在于,所述基于所述载客重量计算得到扭矩补偿值,包括:
5.根据权利要求1的主动驱动的扭矩控制方法,其特征在于,所述根据所述扭矩补偿值,对当前的电机输出的扭矩进行补偿,以使电动车当前输出的驱动力与前一时刻的驱动力保持一致,或,以使电动车当前输出的制动力与前一时刻的制动力保持一致,包括:
6.主动驱动的扭矩控制装置,其特征在于,包括:
7.主动驱动的扭矩控制系统,其特征在于,包括:
8.计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如权利要求1至5任意一项所述的主动驱动的扭矩控制方法。
技术总结
本申请公开了一种主动驱动的扭矩控制方法、装置、系统及存储介质,涉及电动车控制技术领域,包括:实时获取电动车上的乘客人数;当当前的乘客人数与前一时刻的乘客人数不一致,将当前的乘客人数换算为载客重量;基于载客重量计算得到扭矩补偿值;根据扭矩补偿值,对当前的电机输出的扭矩进行补偿,以使电动车当前输出的驱动力与前一时刻的驱动力保持一致,或,以使电动车当前输出的制动力与前一时刻的制动力保持一致。本申请能够基于乘客人数对电动车的电机扭矩进行补偿,从而改善驾驶员的驾驶舒适度。
技术研发人员:全颂华,曹桂军,余万德,朱懋福
受保护的技术使用者:深圳市氢蓝时代动力科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!