一种基于滑模控制的巡航车速控制方法
本发明涉及汽车主动安全,具体而言,涉及一种基于滑模控制的巡航车速控制方法。
背景技术:
1、随着汽车逐渐实现普及,驾驶员的超速驾驶、疲劳驾驶等不当驾驶行为严重影响道路安全,汽车主动安全技术得以发展,特别是自适应巡航技术,保障了行车安全。其中,预见性自适应巡航能够通过高精地图获取前方道路坡度、曲率、限速等道路信息实现对商用车车速、挡位的最优控制,实现更高的安全性和经济性。
2、但由于商用车车速控制系统存在参数不确定性问题(比如:车辆质量、摩擦系数、发动机效率、传感器监测误差等)、外界驾驶环境干扰情况(比如其他车辆超车、道路堵塞、天气突变)和控制器设计问题,使商用车巡航过程中会受到外部或自身扰动,导致车速控制系统的控制性能变低、抗干扰性弱、控制精度变差。
3、现有技术中,通过算法控制提高抗干扰性,如名称为“一种地面自主车辆模型预测速度跟踪控制方法”的文章,提出了分层纵向控制方法;名称为“基于核最小二乘策略迭代的自学习巡航控制”,提出了pi控制与强化学习结合得到最优切换策略;使用积分模块处理稳态误差等。但这些控制算法仍存在许多不足之处:(1)针对商用车巡航车速控制系统稳定性问题,大部分传统算法对计算需求有较高要求,但传统算法的控制原理复杂且难以调试,因此在实际应用中对于提高车速控制系统的抗干扰性能大打折扣;
4、(2)针对缺陷(1),提出滑模控制,其原理简单,抗干扰性强,但传统商用车巡航车速控制系统中多采用一阶滑模控制,虽能及时对实际车速进行修正,但其又存在实际输出车速抖振较大和车速误差调试工作量大的问题;
5、(3)目前商用车车速控制系统采用滑模控制的方案,均是基于车速反步法来设计控制律从而达到改善实际输出车速抖振的问题,但当其处于维度较大或运算时间较长时(比如需要处理多个输入和状态变量:车速、加速度、高精地图和传感器获取的道路信息、行车环境条件等),易发生微分(计算量)爆炸或高阶导数不存在,即导致控制车速修正的效率较差,导致车速误差的调整灵敏度变差;(4)商用车传统巡航控制中,对抑制外界未知干扰的控制较少,导致车速控制系统的控制精度较差。
技术实现思路
1、针对以上问题,本申请提供了一种基于滑模控制的巡航车速控制方法,包括以下步骤:
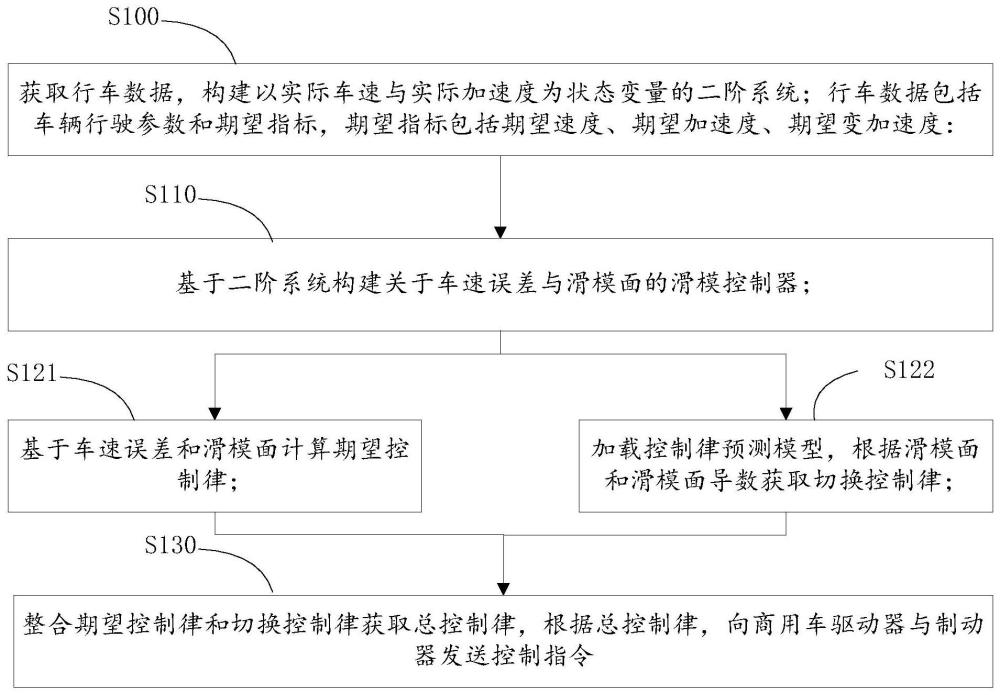
2、获取行车数据,构建以实际车速x1与实际加速度x2为状态变量的二阶系统;其中,行车数据包括车辆行驶参数和期望指标,期望指标包括期望速度vd、期望加速度期望变加速度
3、基于二阶系统构建关于车速误差e1与滑模面s的滑模控制器;
4、基于车速误差e1和滑模面s计算期望控制律
5、加载控制律预测模型,根据滑模面s和滑模面导数获取切换控制律
6、整合所述期望控制律和切换控制律获取总控制律积分所述总控制律求得驱动力ft,根据所述驱动力ft,向商用车驱动器与制动器发送控制指令。
7、其中,获取行车数据包括:从传感器获取车辆行驶参数,预测期望指标;
8、其中,从传感器获取的车辆行驶参数包括当前车速v与加速度车辆载重车辆净重m、坡度信息α、大气压力p、温度t、发动机转矩ttq、发动机转速n;
9、预测期望指标指:根述车辆行驶参数,结合车辆动力学模型计算期望指标;
10、进一步的:二阶系统表示为:
11、且:
12、
13、
14、其中,m为车辆总质量、为车辆额外承载质量、m为车辆空载质量、ff为滚动阻力、fi为坡度阻力、fw为空气阻力、fc为车辆所受未知外界干扰力、ft为驱动力、f为滚动阻力系数、cd为空气阻力系数、a为迎风面积、ρ为空气密度、q为干扰项。
15、进一步的,定义滑模控制器,该滑模控制器的滑模变量为车速跟踪误差e1与二阶系统的系统状态,对应滑模面为s,用于实现状态变量车速v和加速度在有限时间到达s=0的控制律。
16、其中,基于所述二阶系统构建关于车速误差e1与滑模面s的滑模控制器的执行过程,包括:
17、定义车速误差为:e1=x1-x1d,
18、其中,x1为实际车速,x1d为期望车速,且x1d=vd;
19、根据实际车速和车速误差定义滑模函数,滑模函数表示为:
20、且
21、根据滑模函数定义李雅普诺夫函数v1,李雅普诺夫函数v1表示为:
22、对李雅普诺夫函数v1求导,求导结果表示为:
23、
24、进一步的,基于滑模控制器控制下的车速误差e1和滑模面s计算期望控制律包括:
25、构建以期望加速度和期望变加速度为状态变量的一阶低通滤波器,一阶低通滤波器表示为:其中,α1为一阶惯性环节输入量、t2为随机系数;
26、通过一阶低通滤波器与所述车速误差e1和滑模面s,更新李雅普诺夫函数v1求导的表达式,表示为:
27、
28、其中,k1为随机系数、为期望控制律;
29、由上式可获取期望控制律的计算方法,表示为:
30、
31、进定步的,加载控制律预测模型前,构建控制律预测模型,包括:
32、定义bp模糊神经网络;
33、训练bp模糊神经网络,获取最佳模型参数,最佳模型参数包括:最优中心值cij、宽度σij和连接权值wij;
34、根据最佳模型参数,构建控制律预测模型。
35、其中,控制律预测模型为两输入单输出系统,输入参数xi,包括滑模面s与滑模面导数输出参数为切换控制律
36、获取驱动力ft指:对切换控制律和期望控制律进行累加,对累加值总控制律进行积分,积分结果为驱动力ft。
37、进一步的,根据控制律预测模型的最佳模型参数,可实现预测干扰力包括:
38、设置外界未知干扰项估计值预测算法:
39、
40、其中,x、ω为所述预测算法输入参数,为参数x对应的第j次获取的输入参数,包括滑模面s与滑模面导数ωt为ω对应的控制律预测模型最佳连接权值。
41、进一步的,二阶系统中的参数:车辆所受未知外界干扰力,可通过预测干扰力获取。
42、根据本发明,可以使车速控制系统对车速跟踪的控制更加简单、易于调试,且能有效修正期望车速与实际车速的跟踪误差,同时保证了车速控制的抗干扰性;同时加入了商用车行驶过程中外界未知干扰对实际控制输出车速的影响,提高了车速控制系统的控制精度,保证车速控制的稳定性和控制效率,并降低对mcu算力的依赖及计算成本。
技术特征:
1.一种基于滑模控制的巡航车速控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的巡航车速控制方法,其特征在于,所述获取行车数据包括:从传感器获取车辆行驶参数、预测期望指标;
3.根据权利要求1所述的巡航车速控制方法,其特征在于,定义所述滑模控制器的滑模变量为车速跟踪误差e1与所述二阶系统的系统状态,滑模面为s,用于实现状态变量车速v和加速度在有限时间到达s=0的控制律。
4.根据权利要求3所述的巡航车速控制方法,其特征在于,所述基于所述二阶系统构建关于车速误差e1与滑模面s的滑模控制器,包括:
5.根据权利要求4所述的巡航车速控制方法,其特征在于,所述基于车速误差e1和滑模面s计算期望控制律包括:
6.根据权利要求1所述的巡航车速控制方法,其特征在于,所述加载控制律预测模型前,构建所述控制律预测模型,包括:
7.根据权利要求6所述的巡航车速控制方法,其特征在于,所述控制律预测模型为两输入单输出系统,输入参数xi包括滑模面s与滑模面导数输出参数为切换控制律
8.根据权利要求7所述的巡航车速控制方法,其特征在于,根据所述最佳模型参数,实现预测干扰力包括:
9.根据权利要求2所述的巡航车速控制方法,其特征在于,所述车辆所受未知外界干扰力,通过所述预测干扰力获取。
10.根据权利要求1所述的巡航车速控制方法,其特征在于,所述获取驱动力ft指:对所述切换控制律和期望控制律进行累加,对所述累加值总控制律进行积分,所述积分结果为所述驱动力ft。
技术总结
本发明公开了一种基于滑模控制的巡航车速控制方法,包括:获取行车数据,构建以实际车速x<subgt;1</subgt;与实际加速度x<subgt;2</subgt;为状态变量的二阶系统;基于二阶系统构建关于车速误差e<subgt;1</subgt;与滑模面s的滑模控制器;基于车速误差e<subgt;1</subgt;和滑模面s计算期望控制律加载控制律预测模型,根据滑模面s和滑模面导数获取切换控制律整合期望控制律和切换控制律获取总控制律F<subgt;t</subgt;,根据总控制律F<subgt;t</subgt;,向商用车驱动器与制动器发送控制指令。根据上述技术方案,可以提高了车速控制系统的控制精度,保证车速控制的稳定性和控制效率。
技术研发人员:唐荣江,梁梦,毕道坤,刘通,蒋才平,游泽宇,余天行
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!