车辆控制方法及车辆控制装置与流程
本申请涉及智慧矿山、自动驾驶以及无人车,具体涉及一种车辆控制方法及车辆控制装置。
背景技术:
1、目前,无人驾驶车辆(又称自动驾驶车辆)需要使用激光雷达、摄像头等多种传感器来确定前方车辆的速度和位置等信息,然后结合所确定的信息进行自身驾驶行为的决策与规划,以实现高精度的速度跟随的目的。
2、然而,传统的速度跟随方法受驾驶环境的影响较大,恶劣的驾驶环境会导致车辆存在油门刹车频繁往复交替的问题。以矿区举例,矿区中的道路不仅坑洼比较多而且坡道也非常多,这无疑引发了油门刹车频繁往复交替的现象,进而加大了无人驾驶车辆的控制难度。油门刹车频繁往复交替,不仅会增加车辆油耗,也会对车辆底盘造成磨损,进而影响车辆寿命。
技术实现思路
1、有鉴于此,本申请提供一种车辆控制方法及车辆控制装置。
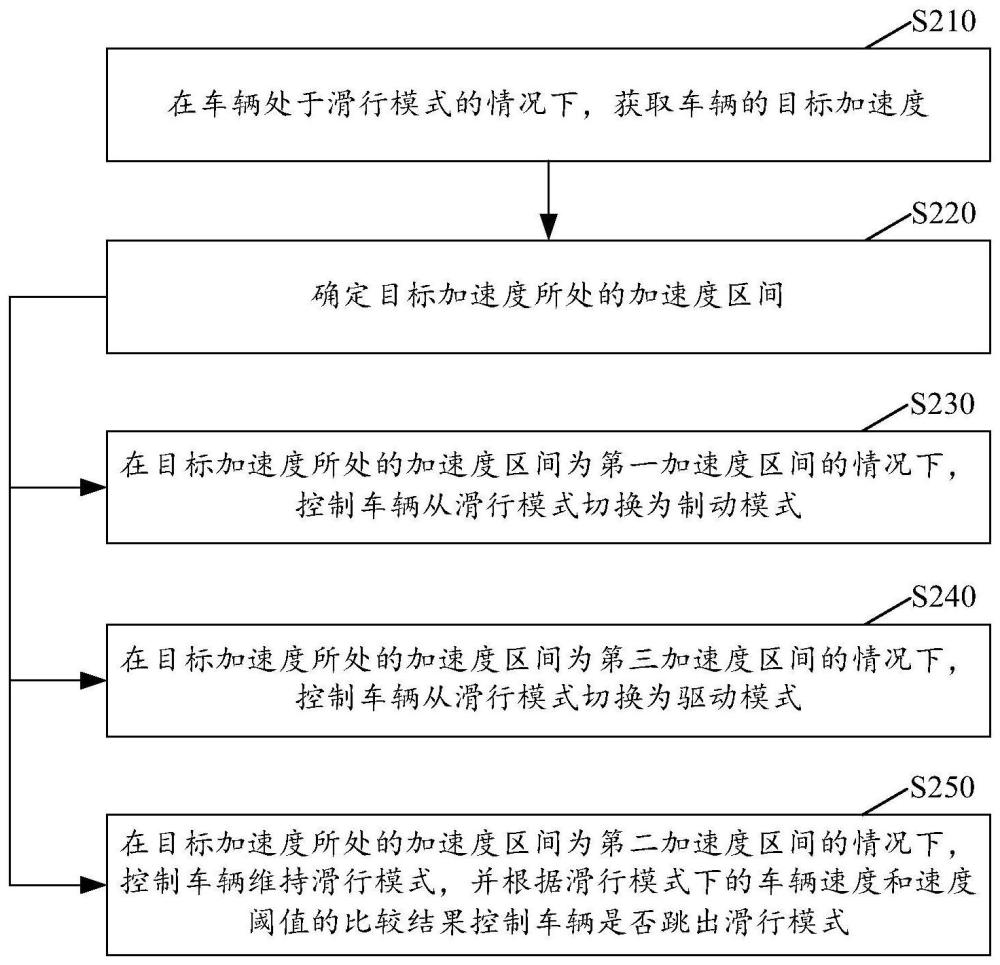
2、第一方面,提供一种车辆控制方法,包括:在车辆处于滑行模式的情况下,获取车辆的目标加速度;确定目标加速度所处的加速度区间,加速度区间包括第一加速度区间、第二加速度区间和第三加速度区间,加速度区间的区间长度根据车辆所处的场景的场景信息调整,场景信息包括:上下坡信息、坡度信息和/或载重情况;在目标加速度所处的加速度区间为第一加速度区间的情况下,控制车辆从滑行模式切换为制动模式;在目标加速度所处的加速度区间为第三加速度区间的情况下,控制车辆从滑行模式切换为驱动模式;在目标加速度所处的加速度区间为第二加速度区间的情况下,控制车辆维持滑行模式,并根据滑行模式下的车辆速度和速度阈值的比较结果控制车辆是否跳出滑行模式。
3、结合第一方面,在第一方面的某些实现方式中,在确定目标加速度所处的加速度区间之前,该方法还包括:在基于上下坡信息确定车辆处于平地或上坡阶段的情况下,基于载重信息和坡度信息确定第二加速度区间。
4、结合第一方面,在第一方面的某些实现方式中,基于载重信息和坡度信息确定第二加速度区间,包括:确定第一阈值和第二阈值,并根据第一阈值和第二阈值确定第二加速度区间,其中,第一阈值为退出第二加速度区间进入第一加速度区间的阈值,第二阈值为退出第二加速度区间进入第三加速度区间的阈值,第一阈值是根据载重信息和坡度信息确定的。
5、结合第一方面,在第一方面的某些实现方式中,通过以下方式确定第一阈值,包括:获取车辆对应的基础滑行阈值;基于载重信息和坡度信息,确定车辆对应的补偿量;计算补偿量与第一指定常数的求和结果,计算求和结果与基础滑行阈值的求积结果,将求积结果对应的相反数确定为第一阈值;优选地,第二阈值为零。
6、结合第一方面,在第一方面的某些实现方式中,基于载重信息和坡度信息,确定车辆对应的补偿量,包括:基于载重信息,确定车辆的载重状态以及载重状态对应的数值,优选地,载重状态包括空载状态和重载状态;基于坡度信息,确定上坡坡度百分比;计算上坡坡度百分比与第二指定常数的求商结果,并将求商结果和载重状态对应的数值的求和结果确定为车辆对应的补偿量。
7、结合第一方面,在第一方面的某些实现方式中,在确定目标加速度所处的加速度区间之前,该方法还包括:在基于上下坡信息确定车辆处于下坡阶段的情况下,基于坡度信息确定第二加速度区间。
8、结合第一方面,在第一方面的某些实现方式中,基于坡度信息确定第二加速度区间,包括:确定第一阈值和第二阈值,并根据第一阈值和第二阈值确定第二加速度区间,其中,第一阈值为退出第二加速度区间进入第一加速度区间的阈值,第二阈值为退出第二加速度区间进入第三加速度区间的阈值,第二阈值是基于坡度信息确定的。
9、结合第一方面,在第一方面的某些实现方式中,通过以下方式确定第二阈值,包括:基于坡度信息确定下坡坡度百分比;计算下坡坡度百分比的正弦值,将正弦值与重力加速度的求积结果确定为第二阈值;优选地,第一阈值为零。
10、结合第一方面,在第一方面的某些实现方式中,根据滑行模式下的车辆速度和速度阈值的比较结果控制车辆是否跳出滑行模式,包括:在基于上下坡信息确定车辆处于平地或上坡阶段的情况下,若目标加速度为负值,且车辆速度大于第一速度阈值,则控制车辆跳出滑行模式并进入制动模式;和/或,在基于上下坡信息确定车辆处于下坡阶段的情况下,若目标加速度为正值,且车辆速度小于第二速度阈值,则控制车辆跳出滑行模式并进入驱动模式。
11、结合第一方面,在第一方面的某些实现方式中,通过以下方式计算第一速度阈值,包括:获取车辆与障碍物之间的相对距离;获取车辆相对于障碍物的相对速度;基于相对距离和相对速度,确定第一速度阈值;和/或,通过以下方式计算第二速度阈值,包括:计算第一常数与当前车速的第一求积结果;计算下坡坡度百分比的正弦值与重力加速度的第二求积结果;基于第一求积结果与第二求积结果的求和结果,确定第二速度阈值。
12、第二方面,提供一种车辆控制装置,包括:获取模块,用于在车辆处于滑行模式的情况下,获取车辆的目标加速度;确定模块,用于确定目标加速度所处的加速度区间,加速度区间包括第一加速度区间、第二加速度区间和第三加速度区间,加速度区间的区间长度根据车辆所处的场景的场景信息调整,场景信息包括:上下坡信息、坡度信息和/或载重情况;第一控制模块,用于在目标加速度所处的加速度区间为第一加速度区间的情况下,控制车辆从滑行模式切换为制动模式;第二控制模块,用于在目标加速度所处的加速度区间为第三加速度区间的情况下,控制车辆从滑行模式切换为驱动模式;第三控制模块,用于在目标加速度所处的加速度区间为第二加速度区间的情况下,控制车辆维持滑行模式,并根据滑行模式下的车辆速度和速度阈值的比较结果控制车辆是否跳出滑行模式。
13、第三方面,提供一种电子设备,包括:处理器;以及存储器,用于存储处理器的可执行指令;其中,处理器配置为经由执行可执行指令来执行上述第一方面提供的车辆控制方法。
14、第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,计算机程序被处理器执行时实现上述第一方面提供的车辆控制方法。
15、本申请实施例提供的车辆控制方法,通过在车辆处于滑行模式的情况下,基于车辆的目标加速度所处的加速度区间(加速度区间的区间长度是根据车辆所处的场景的场景信息调整的)确定是否控制车辆切换到其他模式的方式,实现了设置动态的、随场景信息调整的加速度区间,进而基于车辆的滑行滚动阻力和重力的下滑分量为车辆提供部分动力或阻力的目的。此外,基于车辆目标加速度所处的加速度区间确定是否进入制动或驱动模式,能够减少车辆在速度跟随模式下的频繁制动和/或驱动,进而实现了节约油耗、减少车辆底盘磨损的目的。再者,本申请实施例能够在滑行模式下监控车辆的速度,从而保证了安全性和可靠性。
技术特征:
1.一种车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆控制方法,其特征在于,在所述确定所述目标加速度所处的加速度区间之前,还包括:
3.根据权利要求2所述的车辆控制方法,其特征在于,所述基于所述载重信息和所述坡度信息确定所述第二加速度区间,包括:
4.根据权利要求3所述的车辆控制方法,其特征在于,通过以下方式确定所述第一阈值,包括:
5.根据权利要求4所述的车辆控制方法,其特征在于,所述基于所述载重信息和所述坡度信息,确定所述车辆对应的补偿量,包括:
6.根据权利要求1所述的车辆控制方法,其特征在于,在所述确定所述目标加速度所处的加速度区间之前,还包括:
7.根据权利要求6所述的车辆控制方法,其特征在于,所述基于所述坡度信息确定所述第二加速度区间,包括:
8.根据权利要求7所述的车辆控制方法,其特征在于,通过以下方式确定所述第二阈值,包括:
9.根据权利要求1至8中任一项所述的车辆控制方法,其特征在于,所述根据所述滑行模式下的车辆速度和速度阈值的比较结果控制所述车辆是否跳出所述滑行模式,包括:
10.根据权利要求9所述的车辆控制方法,其特征在于,通过以下方式计算所述第一速度阈值,包括:
11.一种车辆控制装置,其特征在于,包括:
技术总结
本申请提供一种车辆控制方法及车辆控制装置,涉及智慧矿山、自动驾驶以及无人车技术领域。该方法包括:在车辆处于滑行模式的情况下,获取车辆的目标加速度;确定目标加速度所处的加速度区间;在目标加速度所处的加速度区间为第一加速度区间的情况下,控制车辆从滑行模式切换为制动模式;在目标加速度所处的加速度区间为第三加速度区间的情况下,控制车辆从滑行模式切换为驱动模式;在目标加速度所处的加速度区间为第二加速度区间的情况下,控制车辆维持滑行模式,并根据滑行模式下的车辆速度和速度阈值的比较结果控制车辆是否跳出滑行模式,减少了矿区环境中自动驾驶车辆的频繁制动和/或驱动,能够节约油耗、减少车辆底盘磨损。
技术研发人员:孙小文
受保护的技术使用者:北京易控智驾科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!