一种车辆横摆稳定性的控制方法、系统和存储介质与流程
本发明涉及车辆辅助控制领域,特别是涉及一种车辆横摆稳定性的控制方法、系统和存储介质。
背景技术:
1、汽车在高速行驶或不平道路上行驶等过程中,由于操纵稳定性失控容易导致的交通事故造成人员伤亡。当车辆在高速行驶中出现侧滑、甩尾等情况时,由于车辆的轮胎所提供的侧向力有限,无法完全保证车身稳定,驾驶员也难以通过转向修正的方式避免事故的发生。此外,在车辆转弯过程中,车辆会直接产生横摆角速度,当车速超出临界值时,车辆的横摆角速度增益将急剧增大,也容易导致车辆发生侧滑或甩尾等危险事故。
2、相关技术通过模糊控制的方法对汽车的横摆角速度以及横摆力矩进行控制,以防止侧滑或甩尾等危险事件的发生。但是由于模糊控制方法需以来大量历史数据,但是车辆发生横摆事故的场景是不确定的,历史数据难以覆盖全面,存在一定的局限性,不能够完全适用于各类复杂工况下的汽车横摆控制。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种车辆横摆稳定性的控制方法、系统和存储介质,解决了现有技术中难以适应各类复杂工况下的汽车横摆控制的问题。
2、第一方面,本申请提供了一种车辆横摆稳定性的控制方法,包括以下步骤:
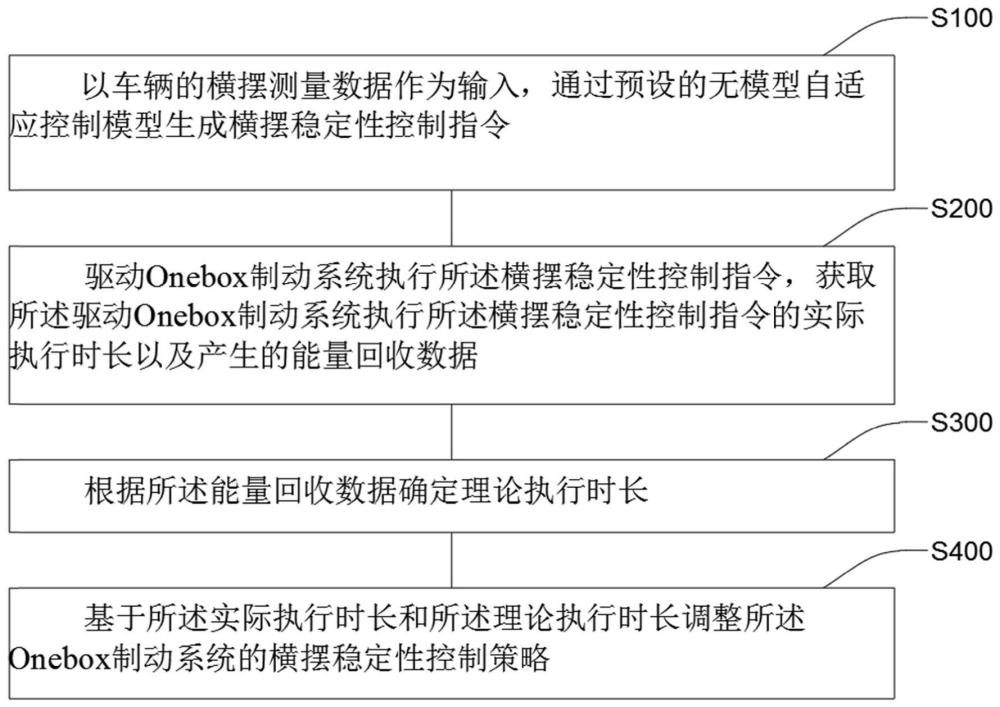
3、以车辆的横摆测量数据作为输入,通过预设的无模型自适应控制模型生成横摆稳定性控制指令;
4、驱动onebox制动系统执行所述横摆稳定性控制指令,获取所述驱动onebox制动系统执行所述横摆稳定性控制指令的实际执行时长以及产生的能量回收数据;
5、根据所述能量回收数据确定理论执行时长;
6、基于所述实际执行时长和所述理论执行时长调整所述onebox制动系统的横摆稳定性控制策略。
7、在一实施例中,所述根据所述能量回收数据确定理论执行时长,具体包括:
8、获取所述驱动onebox制动系统执行所述横摆稳定性控制指令过程中车辆的制动距离;获取执行所述横摆稳定性控制指令开始时的所述车辆的初始车速、所述横摆稳定性控制指令结束时的所述车辆的终止车速;获取车辆的质量信息;
9、根据所述能量回收数据、所述制动距离、所述初始车速、所述终止车速和所述质量信息通过预设的能量回收模型生成所述理论执行时长。
10、在一实施例中,所述能量回收模型具体为:
11、
12、其中,所述e为能量回收数据,所述m为车辆的质量信息,所述v为终止车速,所述v0为初始车速,所述t为理论执行时长,所述s为制动距离。
13、在一实施例中,所述驱动onebox制动系统执行所述横摆稳定性控制指令,具体包括:
14、驱动所述onebox制动系统的动力单元差动制动,并驱动所述onebox制动系统的能量回收单元将所述动力机构制动时产生的机械能转化为电能,将所述电能存储于所述onebox制动系统的储能单元。
15、在一实施例中,在以车辆的横摆测量数据作为输入,通过预设的无模型自适应控制模型生成横摆稳定性控制指令之前,还包括:
16、基于车辆的行驶姿态数据,通过预设的模糊预测模型生成横摆判断数据;
17、计算所述横摆测量数据和所述横摆判断数据之间的横摆偏差值;
18、当所述横摆偏差值超出预设的横摆偏差阈值范围时,将所述横摆测量数据输入所述无模型自适应控制模型。
19、在一实施例中,以车辆的横摆测量数据作为输入,通过预设的无模型自适应控制模型生成横摆稳定性控制指令,具体包括:
20、将所述横摆测量数据作为输入,通过预设的车辆系统动力学模型输出横摆微分数据;
21、根据所述横摆测量数据和所述横摆微分数据构建海森矩阵控制器;
22、基于所述海森矩阵控制器,通过横摆期望数据生成横摆稳定性控制指令。
23、在一实施例中,在将所述横摆测量数据作为输入,通过预设的车辆系统动力学模型输出横摆微分数据之前,还包括:
24、基于预设的二自由度车辆模型,根据所述横摆测量数据构建所述车辆系统动力学模型;其中,所述横摆测量数据包括所述车辆的四个车轮的转矩、四个车轮的角速度、侧向速度以及横摆角速度。
25、在一实施例中,所述基于所述海森矩阵控制器,通过横摆期望数据生成横摆稳定性控制指令,具体包括:
26、获取所述海森矩阵控制器第t个时间节点的估计值;
27、根据所述第t个时间节点的估计值、第(t+1)个时间节点的所述横摆期望数据,计算所述海森矩阵控制器的所述第t个时间节点的输入值;
28、根据所述第t个时间节点的输入值、所述第t个时间节点的估计值,通过所述车辆系统动力学模型生成第(t+1)个时间节点的横摆预测数据;
29、根据所述第(t+1)个时间节点的所述横摆期望数据、所述第(t+1)个时间节点的横摆预测数据,生成横摆稳定性控制指令。
30、第二方面,本申请提供了一种车辆横摆稳定性的控制系统,包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序用于由所述处理器加载并执行如第一方面中任意一项所述的车辆横摆稳定性的控制方法。
31、第三方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质存储有指令,所述指令用于由处理器加载并执行如第一方面中任意一项所述的车辆横摆稳定性的控制方法。
32、在本申请实施例中,通过无模型自适应控制模型对车辆的横摆稳定进行调节,受外界环境影响较小,可适应各种复杂工况的主动纠错,确保车辆能维持横摆稳定,有效避免车辆发生侧滑或甩尾等危险事故。并基于onebox制动系统在执行横摆稳定性控制指令过程中产生的机械能转化为电能进行存储,以增加新能源汽车的续航里程。通过onebox制动系统所回收的能量可得到onebox制动系统回收能量的效率,便于及时调整onebox制动系统的横摆稳定性控制策略,提高能量回收的效率。
技术特征:
1.一种车辆横摆稳定性的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车辆横摆稳定性的控制方法,其特征在于,所述根据所述能量回收数据确定理论执行时长,具体包括:
3.根据权利要求2所述的车辆横摆稳定性的控制方法,其特征在于,所述能量回收模型具体为:
4.根据权利要求1所述的车辆横摆稳定性的控制方法,其特征在于,所述驱动onebox制动系统执行所述横摆稳定性控制指令,具体包括:
5.根据权利要求1所述的车辆横摆稳定性的控制方法,其特征在于,在以车辆的横摆测量数据作为输入,通过预设的无模型自适应控制模型生成横摆稳定性控制指令之前,还包括:
6.根据权利要求1所述的车辆横摆稳定性的控制方法,其特征在于,以车辆的横摆测量数据作为输入,通过预设的无模型自适应控制模型生成横摆稳定性控制指令,具体包括:
7.根据权利要求6所述的车辆横摆稳定性的控制方法,其特征在于,在将所述横摆测量数据作为输入,通过预设的车辆系统动力学模型输出横摆微分数据之前,还包括:
8.根据权利要求6所述的车辆横摆稳定性的控制方法,其特征在于,所述基于所述海森矩阵控制器,通过横摆期望数据生成横摆稳定性控制指令,具体包括:
9.一种车辆横摆稳定性的控制系统,包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序用于由所述处理器加载并执行如权利要求1-8中任意一项所述的车辆横摆稳定性的控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有指令,所述指令用于由处理器加载并执行如权利要求1-8中任意一项所述的车辆横摆稳定性的控制方法。
技术总结
本发明提供了一种车辆横摆稳定性的控制方法、系统和存储介质,包括:以车辆的横摆测量数据作为输入,通过预设的无模型自适应控制模型生成横摆稳定性控制指令;驱动Onebox制动系统执行横摆稳定性控制指令,获取驱动Onebox制动系统执行横摆稳定性控制指令的实际执行时长以及产生的能量回收数据;根据能量回收数据确定理论执行时长;基于实际执行时长和理论执行时长调整Onebox制动系统的横摆稳定性控制策略。通过无模型自适应控制模型对车辆的横摆稳定进行调节,受外界环境影响较小,可适应各种复杂工况的主动纠错,确保车辆能维持横摆稳定。并基于Onebox制动系统在执行横摆稳定性控制指令过程中产生的机械能转化为电能进行存储,以增加新能源汽车的续航里程。
技术研发人员:杜伟
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!