一种智能驾驶辅助控制方法及系统
本发明涉及智能驾驶辅助控制,特别是一种智能驾驶辅助控制方法及系统。
背景技术:
1、在智能驾驶领域,现有技术已经实现了多种车辆自动控制方法,包括自适应巡航控制、自动紧急制动、车道保持辅助等功能,这些系统通过集成的传感器网络,如雷达、摄像头、激光雷达等来收集车辆周围的环境信息,并通过车载计算机进行处理,以实现对车辆行为的自动控制,然而,尽管现有技术已经取得了重大进展,但在实际应用中,智能驾驶系统在面对行驶环境上存在的障碍时仍不能将多种技术进行整合,综合进行应对处理,对于车辆行驶中的问题不能完善应对处理。
技术实现思路
1、鉴于上述现有的智能驾驶辅助控制方法及系统中存在的问题,提出了本发明。
2、因此,本发明所要解决的问题在于智能驾驶系统在面对行驶环境上存在的障碍时仍不能将多种技术进行整合,综合进行应对处理,对于车辆行驶中的问题不能完善应对处理。
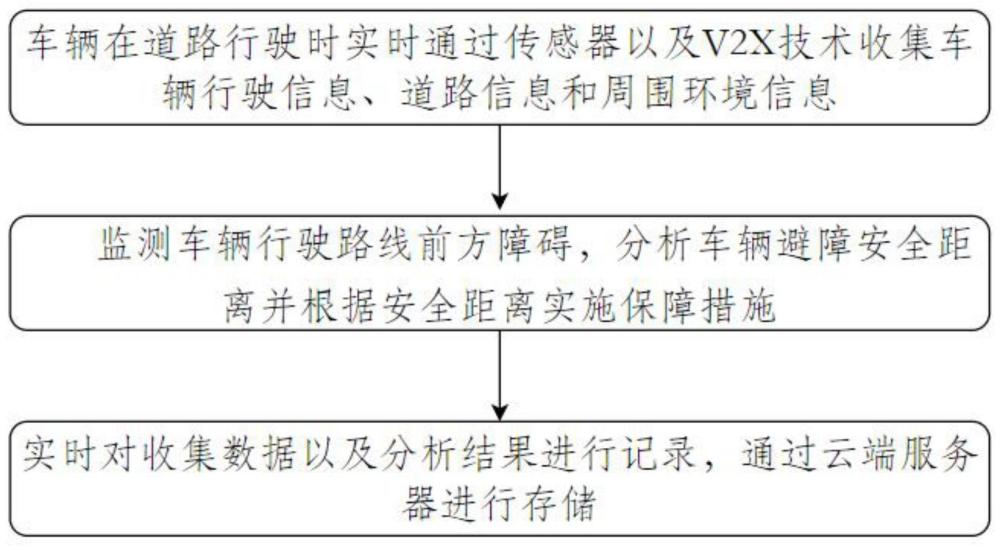
3、为解决上述技术问题,本发明提供如下技术方案:一种智能驾驶辅助控制方法,其包括,车辆在道路行驶时实时通过传感器以及v2x技术收集车辆行驶信息、道路信息和周围环境信息;监测车辆行驶路线前方障碍,分析车辆避障安全距离并根据安全距离实施保障措施;实时对收集数据以及分析结果进行记录,通过云端服务器进行存储。
4、作为本发明所述智能驾驶辅助控制方法的一种优选方案,其中:所述车辆在行驶过程中实时收集行驶道路信息,若检测到车辆行驶正前方存在障碍物且障碍物速度低于车辆行驶速度,车辆判断继续行驶会发生碰撞,则通过收集的信息数据计算车辆的安全刹车距离,算法如下:
5、
6、其中s代表安全刹车距离,v代表车辆的行驶速度,v0代表障碍物的速度,μ是车辆与路面之间的摩擦系数,通过传感器获取,g为重力加速度,w为车辆重量,γ为车辆重量对刹车性能的影响因子,通过历史数据计算得出,
7、通过v2x技术收集车辆周围车辆行驶环境信息,若确定车辆周围存在多条行驶路线,分析车辆变道安全距离,计算公式如下:
8、
9、其中m车为本车辆,m1为可能对本车辆造成变道风险的车辆,s(m,m1)代表m车和m1车之间安全变道距离,ax(τ)和ay(τ)代表m车在纵向和横向的加速度,axm1和aym1代表m1车在纵向和横向的加速度,ω1和ω2为平衡纵向和横向加速度对安全距离影响的权重因子,通过历史数据获取,λ(f)为道路摩擦系数的调整因子,通过历史数据获取,θ(δv)为两车之间速度差异,φ(δθ)为两车之间方向角差异,通过传感器监测确定,t为车辆完成变道的时间,根据历史驾驶数据获取。
10、作为本发明所述智能驾驶辅助控制方法的一种优选方案,其中:所述保障措施是指将安全刹车距离与车辆和障碍物之间距离进行对比判断车辆行驶的安全状态并根据驾驶员行为实施对应措施,设车辆与障碍物之间的距离为s’:
11、若s’大于2s,则通过语音播报车辆行驶路线前方存在可能碰撞的障碍物并建议驾驶员进行减速或变更车辆行驶路线,若驾驶员选择进行减速,则在车辆速度等于或小于障碍物速度时提醒驾驶员行驶路线障碍物消失,若驾驶员选择变更车辆行驶路线,则通过公式分析车辆两侧变道安全距离,若车辆任意一侧变道安全距离小于s’,则语音播报建议变更方向以及当前变更行驶路线无风险,提示驾驶员可以进行变道,若车辆两侧变道安全距离均大于s’,则语音通知当前变更行驶路线存在碰撞风险,提示驾驶员进行减速或选择其余可变更行驶路线;
12、若s’处于2s与s之间,则通过语音播报车辆行驶路线前方存在障碍物,提醒驾驶员进行减速或变更车辆行驶路线,并根据车辆距离障碍物距离设定驾驶员反馈时间,车辆距离障碍物越远,则设定时间越长,若驾驶员在设定时间进行操作,则继续收集数据辅助驾驶员操控车辆,若驾驶员在设定时间内未进行操作,则在车辆行驶到s’等于s时,自动接管车辆控制,保持当前行驶路线不变进行减速直至车辆速度与障碍物速度一致或车辆速度降至0,同时对驾驶员进行语音询问等待驾驶员反馈,若驾驶员开始对车辆进行操控,则将车辆控制转交给驾驶员,若驾驶员在5s内未对车辆进行操控,则判断驾驶员失去对车辆的操控能力,车辆将自动分析变道风险并变更行驶路线至路线最侧方停车,同步打开车辆警示灯提醒后方车辆注意避让,拨打紧急救助电话帮助驾驶员求助;
13、若s’小于s,则直接语音警示驾驶员即将发生碰撞,同时接管车辆控制并发出碰撞警报,分析车辆行驶路线侧方变更行驶路线安全距离,若满足安全距离,则自动进行车辆变道,变道后继续收集数据分析行驶路线前方障碍,若变道后仍存在障碍物,则继续变更车辆行驶路线直至车辆行驶路线前方障碍物消失,车辆变道消除碰撞风险后通知驾驶员碰撞障碍物消失并将车辆控制权返还驾驶员继续进行驾驶,若车辆周围不存在满足安全距离的路线,则直接进行紧急刹车,保证车辆车头部位对准障碍物,车辆发生碰撞后等待车辆速度降为0后开启车辆警示灯,向驾驶员发出语音询问,并对驾驶员反馈进行时长10s的监测,若驾驶员在10s内没有操作车辆或语音回复,则开启求助警报并自动拨打紧急求助电话进行求助,若驾驶员在10s内回复,则提醒驾驶员离开车辆避免危险或拨打紧急求助电话进行求助。
14、作为本发明所述智能驾驶辅助控制方法的一种优选方案,其中:所述车辆收集的所有数据包括车辆自检数据、车辆行驶环境数据、车辆位置信息、车辆计算数据和分析结果、智能驾驶辅助日志、车辆事故信息以及驾驶员驾驶数据,所有数据均覆盖时间戳进行存储。
15、作为本发明所述智能驾驶辅助控制方法的一种优选方案,其中:所述车辆将数据上传至云端服务器并存储在车辆对应的分类中,并允许从云端服务器中进行下载查看,所述云端服务器定期对数据进行备份。
16、一种智能驾驶辅助控制系统,包括获取模块、分析模块、控制模块以及存储模块,
17、所述获取模块用于收集车辆数据以及车辆行驶环境数据,并在车辆行驶时持续获取行驶环境车辆信息;
18、所述分析模块用于对获取模块获取的数据进行分析判断车辆行驶路线中可能存在的威胁,并根据分析结果制定应对措施;
19、所述控制模块用于根据分析模块制定的应对措施对车辆进行控制;
20、所述存储模块用于对车辆收集和分析的数据进行存储,并将所有数据进行备份。
21、一种智能计算机设备,包括存储器和处理器,所述存储器中存储有计算机可读指令,所述处理器执行所述计算机可读指令时实现智能驾驶辅助控制方法的步骤。
22、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机可读指令,所述计算机可读指令被处理器执行时实现智能驾驶辅助控制方法的步骤。
23、本发明有益效果为:本发明通过收集车辆信息以及行驶环境信息,综合对车辆行驶过程中的障碍进行处理,并提供紧急情况下的有效决策管理,提高了智能驾驶辅助系统的安全性、可靠性和自动响应能力。
技术特征:
1.一种智能驾驶辅助控制方法,其特征在于:包括,
2.如权利要求1所述的智能驾驶辅助控制方法,其特征在于:所述保障措施是指将安全刹车距离与车辆和障碍物之间距离进行对比,判断车辆行驶的安全状态并根据驾驶员行为实施对应措施,设车辆与障碍物之间的距离为s’:
3.如权利要求2所述的智能驾驶辅助控制方法,其特征在于:所述车辆收集的所有数据包括车辆自检数据、车辆行驶环境数据、车辆位置信息、车辆计算数据和分析结果、智能驾驶辅助日志、车辆事故信息以及驾驶员驾驶数据,所有数据均覆盖时间戳进行存储。
4.如权利要求3所述的智能驾驶辅助控制方法,其特征在于:所述车辆将数据上传至云端服务器并存储在车辆对应的分类中,并允许从云端服务器中进行下载查看,所述云端服务器定期对数据进行备份。
5.一种基于权利要求1~4任一所述的智能驾驶辅助控制方法的控制系统,其特征在于:包括获取模块、分析模块、控制模块以及存储模块,
技术总结
本发明公开了一种智能驾驶辅助控制方法及系统,涉及智能驾驶辅助控制领域,包括车辆在道路行驶时实时通过传感器以及V2X技术收集车辆行驶信息、道路信息和周围环境信息;监测车辆行驶路线前方障碍,分析车辆避障安全距离并根据安全距离实施保障措施;实时对收集数据以及分析结果进行记录,通过云端服务器进行存储。本发明通过收集车辆信息以及行驶环境信息,综合对车辆行驶过程中的障碍进行处理,并提供紧急情况下的有效决策管理,提高了智能驾驶辅助系统的安全性、可靠性和自动响应能力。
技术研发人员:常文文,芦家磊,黄霄,聂文超
受保护的技术使用者:兰州交通大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!