一种智能网联客车驱动系统异常自主下电控制方法及系统与流程
本公开属于智能网联客车控制,尤其涉及一种智能网联客车驱动系统异常自主下电控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
2、近年来,智能网联客车的发展趋势越来越明显,其中驱动系统是实现车辆动力的重要组成部分。然而,在车辆运行过程中,电机控制器通讯异常时有发生,给车辆的安全性和可靠性带来了严重的隐患,因此,驱动系统通信异常时车辆安全控制成为当前智能网联客车研究的关键技术之一。目前公开的大多数智能网联客车驱动系统异常车辆下电控制方法,当电机控制器与整车通信异常时,直接控制车辆下高压,该方法若在车辆高速行驶时直接下高压极易造成接触器粘连,同时导致助力转向失效引起车辆失控,使整车安全性降低。
技术实现思路
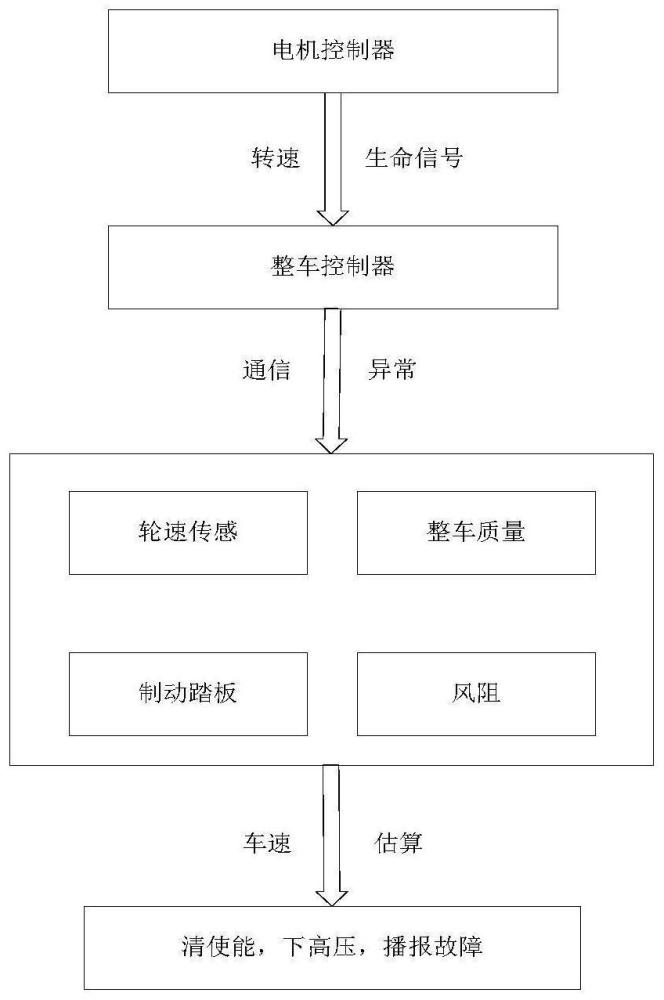
1、本公开为了解决上述问题,提供了一种智能网联客车驱动系统异常自主下电控制方法及系统,所述方案通过整车控制器监测驱动系统实时状态,同时结合轮速传感器信号和制动踏板信号,当车辆出现驱动系统通信异常时,实时估算车辆速度,待车速较低时实现车辆自主下高压,避免高速工况下车辆失控,提高智能网联客车的安全性、可靠性和稳定性。
2、根据本公开实施例的第一个方面,提供了一种智能网联客车驱动系统异常自主下电控制方法,包括:
3、实时获取驱动系统状态;
4、当驱动系统通信异常时,基于异常前一时刻保存的车速,并结合轮速传感器信号或制动踏板信号,进行车速估计;
5、当车速估计结果低于预设车速时,执行车辆高压下电操作。
6、进一步的,所述实时获取驱动系统状态,具体为:当车辆完成上高压后,周期性接收驱动系统报文生命信号,基于驱动系统报文生命信号判断驱动系统状态是否异常。
7、进一步的,所述基于驱动系统报文生命信号判断驱动系统状态是否异常,具体为:根据预设周期,周期性的接收驱动系统报文生命信号,判断当前生命信号与上一时刻生命信号是否相等,若相等,则判定电机can信号丢失;当判定电机can信号丢失时,开始计时,若持续预设时间内仍判定电机can信号丢失,则判定驱动系统通信异常。
8、进一步的,当驱动系统通信异常时,基于异常前一时刻保存的车速并结合轮速传感器信号进行车速估计,具体为:基于轮速传感器获取车辆四轮的轮速;计算所述车速与车辆四轮轮速均值的差值,当所述差值不大于预设阈值时,以车辆四轮轮速均值作为参考值进行车速估计,当车速降低至预设车速以下时,执行车辆高压下电操作。
9、进一步的,当所述差值大于预设阈值时,基于异常前一时刻保存的车速并结合制动踏板信号进行车速估计。
10、进一步的,所述基于异常前一时刻保存的车速并结合制动踏板信号进行车速估计,具体为:基于获得的制动踏板开度信号,并结合预先确定的车辆制动踏板开度与车辆制动减速度之间的关系和预先确定的车辆处于滑行状态下的车辆滑行减速度,确定车辆减速度;基于异常前一时刻保存的车速以及车辆减速度,估计车速低于预设车速时所需的车辆制动时间;自驱动系统通信异常时刻开始计时,当持续时间满足所述车辆制动时间加上预设时间余量时,执行车辆高压下电操作。
11、进一步的,所述驱动系统状态包括驱动系统与整车控制器通信正常和驱动系统与整车控制器通信异常。
12、根据本公开实施例的第二个方面,提供了一种智能网联客车驱动系统异常自主下电控制系统,包括:
13、状态获取单元,其用于实时获取驱动系统状态;
14、车速估计单元,其用于当驱动系统通信异常时,基于异常前一时刻保存的车速,并结合轮速传感器信号或制动踏板信号,进行车速估计;
15、操作单元,其用于当车速估计结果低于预设车速时,执行车辆高压下电操作。
16、根据本发明实施例的第三方面,提供了一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如上所述的一种智能网联客车驱动系统异常自主下电控制方法。
17、根据本发明实施例的第四方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如上所述的一种智能网联客车驱动系统异常自主下电控制方法。
18、与现有技术相比,本公开的有益效果是:
19、(1)本公开所述方案提出一种智能网联客车驱动系统异常自主下电控制方法及系统,所述方案通过整车控制器监测驱动系统实时状态,同时结合轮速传感器信号和制动踏板信号,当车辆出现驱动系统通信异常时,实时估算车辆速度,待车速较低时实现车辆自主下高压,避免高速工况下车辆失控,提高智能网联客车的安全性、可靠性和稳定性。
20、(2)所述方案有效解决了智能网联客车驱动系统通讯异常时,自主控制车辆安全下高压的问题,有效地避免了因电机通讯异常导致车辆失控,提高了车辆的安全性和可靠性。
21、本公开附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
技术特征:
1.一种智能网联客车驱动系统异常自主下电控制方法,其特征在于,包括:
2.如权利要求1所述的一种智能网联客车驱动系统异常自主下电控制方法,其特征在于,所述实时获取驱动系统状态,具体为:当车辆完成上高压后,周期性接收驱动系统报文生命信号,基于驱动系统报文生命信号判断驱动系统状态是否异常。
3.如权利要求2所述的一种智能网联客车驱动系统异常自主下电控制方法,其特征在于,所述基于驱动系统报文生命信号判断驱动系统状态是否异常,具体为:根据预设周期,周期性的接收驱动系统报文生命信号,判断当前生命信号与上一时刻生命信号是否相等,若相等,则判定电机can信号丢失;当判定电机can信号丢失时,开始计时,若持续预设时间内仍判定电机can信号丢失,则判定驱动系统通信异常。
4.如权利要求1所述的一种智能网联客车驱动系统异常自主下电控制方法,其特征在于,当驱动系统通信异常时,基于异常前一时刻保存的车速并结合轮速传感器信号进行车速估计,具体为:基于轮速传感器获取车辆四轮的轮速;计算所述车速与车辆四轮轮速均值的差值,当所述差值不大于预设阈值时,以车辆四轮轮速均值作为参考值进行车速估计,当车速降低至预设车速以下时,执行车辆高压下电操作。
5.如权利要求4所述的一种智能网联客车驱动系统异常自主下电控制方法,其特征在于,当所述差值大于预设阈值时,基于异常前一时刻保存的车速并结合制动踏板信号进行车速估计。
6.如权利要求5所述的一种智能网联客车驱动系统异常自主下电控制方法,其特征在于,所述基于异常前一时刻保存的车速并结合制动踏板信号进行车速估计,具体为:基于获得的制动踏板开度信号,并结合预先确定的车辆制动踏板开度与车辆制动减速度之间的关系和预先确定的车辆处于滑行状态下的车辆滑行减速度,确定车辆减速度;基于异常前一时刻保存的车速以及车辆减速度,估计车速低于预设车速时所需的车辆制动时间;自驱动系统通信异常时刻开始计时,当持续时间满足所述车辆制动时间加上预设时间余量时,执行车辆高压下电操作。
7.如权利要求1所述的一种智能网联客车驱动系统异常自主下电控制方法,其特征在于,所述驱动系统状态包括驱动系统与整车控制器通信正常和驱动系统与整车控制器通信异常。
8.一种智能网联客车驱动系统异常自主下电控制系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有程序,其特征在于,该程序被处理器执行时实现如权利要求1-7任一项所述的一种智能网联客车驱动系统异常自主下电控制方法。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7任一项所述的一种智能网联客车驱动系统异常自主下电控制方法。
技术总结
本公开提供了一种智能网联客车驱动系统异常自主下电控制方法及系统,所述方案包括:实时获取驱动系统状态;当驱动系统通信异常时,基于异常前一时刻保存的车速,并结合轮速传感器信号或制动踏板信号,进行车速估计;当车速估计结果低于预设车速时,执行车辆高压下电操作。
技术研发人员:黄玉鹏,齐洪磊,陈振国,杨传开,李文皓
受保护的技术使用者:中通客车股份有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!