一种用于线控制动系统的冗余控制方法与流程
本发明涉及汽车工业,具体为一种用于线控制动系统的冗余控制方法。
背景技术:
1、随着车辆整车电气化的发展,电子制动助力器ehb+esc构成的线控制动系统被越来越多的应用在汽车制动系统领域中;其中ehb用于放大驾驶员的制动力,为液压制动系统提供主要压力源;esc用于整车操稳性能保持,可实现对车辆四个制动卡钳压力的“增-减-保”。
2、现有方案中ehb与esc各自独立进行自身的故障诊断及后处理策略,当ehb发生故障时(如制动助力丢失),驾驶员只能通过机械备份制动进行制动,然而此时制动踏板力较高(约500n),且减速度较低(约0.24g),远低于ehb正常工作时的制动性能。
技术实现思路
1、本发明的目的在于提供一种用于线控制动系统的冗余控制方法,以解决上述背景技术中提出的现有方案中ehb与esc各自独立进行自身的故障诊断及后处理策略,当ehb发生故障时(如制动助力丢失),驾驶员只能通过机械备份制动进行制动,然而此时制动踏板力较高(约500n),且减速度较低(约0.24g),远低于ehb正常工作时的制动性能的问题。
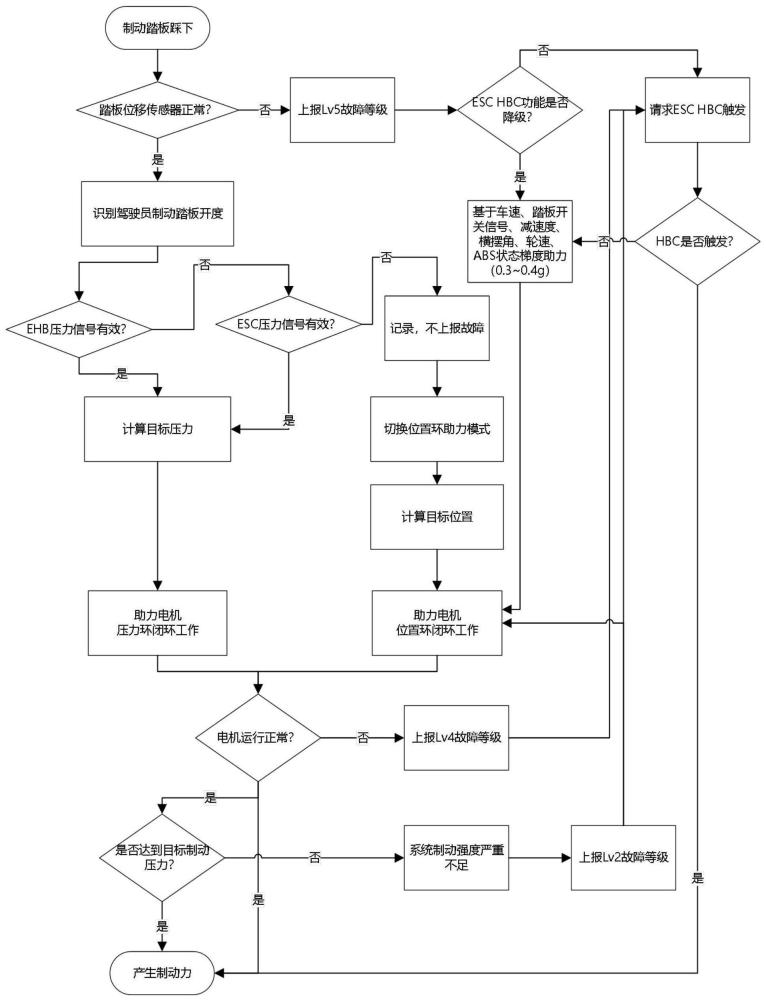
2、为实现上述目的,本发明提供如下技术方案:一种用于线控制动系统的冗余控制方法,包括以下情况:s1正常制动-冗余控制不启用,s2冗余控制工况-ehb位移传感器故障,s3冗余控制工况-ehb压力传感器故障,s4冗余控制工况-ehb助力电机故障,s5冗余控制工况-ehb建压异常;
3、优选的,s1正常制动-冗余控制不启用:制动踏板踩下后ehb位移传感器识别到开度信号;ehb压力传感器自检正常时,进入压力闭环工作模式;当电机工作正常时,ehb达到目标制动压力,产生制动力;
4、优选的,s2冗余控制工况-ehb位移传感器故障:ehb位移传感器故障后无法准确识别驾驶员制动意图,上报故障后请求esc主动增压功能(hbc)。当hbc、esc功能正常时,由esc实现制动增压;当esc、hbc功能故障时,ehb基于车速、踏板开关信号、减速度、横摆角、轮速、abs状态进行主动制动,实现最大0.3~0.4g的梯度助力;
5、优选的,s3冗余控制工况-ehb压力传感器故障:当ehb压力传感器自检出现异常时,ehb采信esc外发的主缸压力信号进行闭环控制;当esc主缸压力信号也发生故障时,ehb不再进行压力闭环,转为位置闭环控制,即输出主缸位移按既定曲线跟随制动踏板开度变化;
6、优选的,s4冗余控制工况-ehb助力电机故障:当ehb助力电机故障时,ehb无法再实现制动助力功能,此时上报故障等级,并请求esc hbc工作。此时如发生esc、hbc同时故障,则驾驶员需要通过踏板力传递直接推动主缸的备份制动方式实现整车制动;
7、优选的,s5冗余控制工况-ehb建压异常:ehb运行时持续监控诊断制动系统管路压力,当ehb本体或制动管路发生泄露等异常情况时,造成制动压力未达到预期,此时ehb上报故障等级,并请求esc协同ehb同时建压,以确保各制动卡钳有足够的制动力。
8、与现有技术相比,本发明的有益效果是:
9、1、本发明从制动系统角度,提出一种冗余控制方法,即针对ehb的各种失效情况,制定不同的后处理策略,调用esc的主动增压功能,改善制动性能;
10、2、本发明不需要更换或增加额外的硬件设备即可实现,没有额外的成本增加。
技术特征:
1.一种用于线控制动系统的冗余控制方法,其特征在于:包括以下情况:s1正常制动-冗余控制不启用,s2冗余控制工况-ehb位移传感器故障,s3冗余控制工况-ehb压力传感器故障,s4冗余控制工况-ehb助力电机故障,s5冗余控制工况-ehb建压异常。
2.根据权利要求1所述的一种用于线控制动系统的冗余控制方法,其特征在于:s1正常制动-冗余控制不启用:制动踏板踩下后ehb位移传感器识别到开度信号;ehb压力传感器自检正常时,进入压力闭环工作模式;当电机工作正常时,ehb达到目标制动压力,产生制动力。
3.根据权利要求1所述的一种用于线控制动系统的冗余控制方法,其特征在于:s2冗余控制工况-ehb位移传感器故障:ehb位移传感器故障后无法准确识别驾驶员制动意图,上报故障后请求esc主动增压功能(hbc)。当hbc、esc功能正常时,由esc实现制动增压;当esc、hbc功能故障时,ehb基于车速、踏板开关信号、减速度、横摆角、轮速、abs状态进行主动制动,实现最大0.3~0.4g的梯度助力。
4.根据权利要求1所述的一种用于线控制动系统的冗余控制方法,其特征在于:s3冗余控制工况-ehb压力传感器故障:当ehb压力传感器自检出现异常时,ehb采信esc外发的主缸压力信号进行闭环控制;当esc主缸压力信号也发生故障时,ehb不再进行压力闭环,转为位置闭环控制,即输出主缸位移按既定曲线跟随制动踏板开度变化。
5.根据权利要求1所述的一种用于线控制动系统的冗余控制方法,其特征在于:s4冗余控制工况-ehb助力电机故障:当ehb助力电机故障时,ehb无法再实现制动助力功能,此时上报故障等级,并请求esc hbc工作。此时如发生esc、hbc同时故障,则驾驶员需要通过踏板力传递直接推动主缸的备份制动方式实现整车制动。
6.根据权利要求1所述的一种用于线控制动系统的冗余控制方法,其特征在于:s5冗余控制工况-ehb建压异常:ehb运行时持续监控诊断制动系统管路压力,当ehb本体或制动管路发生泄露等异常情况时,造成制动压力未达到预期,此时ehb上报故障等级,并请求esc协同ehb同时建压,以确保各制动卡钳有足够的制动力。
技术总结
本发明公开了一种用于线控制动系统的冗余控制方法,包括以下情况:S1正常制动‑冗余控制不启用,S2冗余控制工况‑EHB位移传感器故障,S3冗余控制工况‑EHB压力传感器故障,S4冗余控制工况‑EHB助力电机故障,S5冗余控制工况‑EHB建压异常。本发明从制动系统角度,提出一种冗余控制方法,即针对EHB的各种失效情况,制定不同的后处理策略,调用ESC的主动增压功能,改善制动性能;本发明不需要更换或增加额外的硬件设备即可实现,没有额外的成本增加。
技术研发人员:李卓强,裴宇轩,李闯,张思琦,王世豪
受保护的技术使用者:北京英创汇智汽车技术有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!