一种四轮转向车辆蟹行控制方法与流程
本发明涉及一种车辆蟹行控制方法,具体涉及一种港口箱区等狭窄场景下四轮转向车辆蟹行控制方法,属于自动驾驶。
背景技术:
1、在无人驾驶技术研究中,车辆换道过程是最为关键的研究场景之一,其执行的效果对交通系统的高效性、可靠性和乘客的乘坐安全性、舒适性都有显著的影响。在换道过程的研究上,按照换道的触发机制不同,可以分为强制换道和自由换道两种。如转向、匝道合流等工况,要求车辆必须在指定时间到达指定位置的换道,属于强制换道;如超车等为了获得更好的行驶条件和驾乘感受的工况,则属于自由换道。
2、针对在港口运营区域进行装卸箱作业的智能转运车来说,运营线路上有障碍物或者预期路线改变,需要进行换道行驶时,考虑到港口智能转运车的尺寸较大,在短时间短距离内完成换道动作是必不可少的,不仅可以降低成本损耗,同时可以提高运营效率,使得整个运营路段的平顺性和接管率都可以满足客户需求。
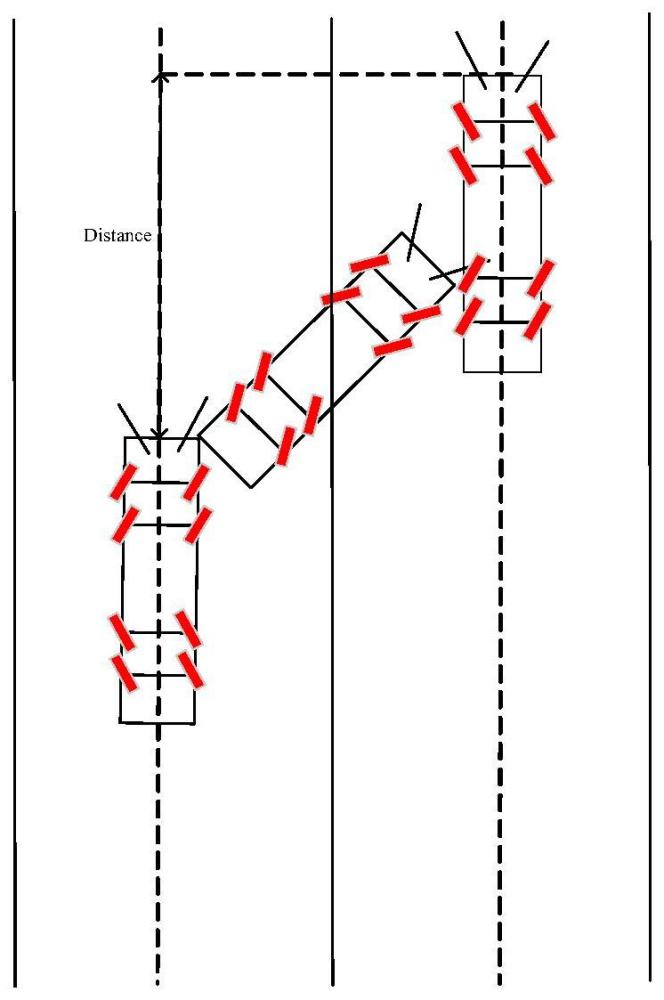
3、港内智能转运车的转向模式有四种,分别为单前轴转向、单后轴转向、四轮转向和四轮蟹行,这四种转向模式均可以满足港口运营区域内的换道需求,但是不同的转向模式对换道距离、换道时间以及换道空间的需求各异。港内智能转运车正常巡线模式下的换道距离过长,而且在曲率较大的区间内会从单前轴转向或单后轴转向切换到四轮转向模式,在该模式下前后轮转角的相位是相反的,因此会出现摆头和甩尾等危险场景,在箱区狭窄区域会造成逼停情况,严重情况下还会导致剐蹭事故的发生;同时受限于转向执行器的响应性能,巡线换道模式对规划轨迹线的曲率质量要求比较高,曲率半径过小也会导致控制超调或者画龙现象的产生,对换道的平顺性和安全性造成较大的影响。而四轮蟹行模式,如图1至图3所示,是指当前后所有车轮朝一个方向旋转相同角度时,即同相位转向,可实现车辆斜向运动,这种运动方式可认为是纵向直线运行与横向运行的合成运动。在车辆高速行驶时,采用同相位转向时,可降低车身横摆角速度,有效抑制车身发生动态侧偏的倾向,改善操控稳定性,而且相对于巡线换道,蟹行换道对换道区域的横向位置要求较小,纵向换到距离更短。蟹行模式下智能转运车的瞬时转动中心沿各个轮轴方向位于无穷远处,相当于每个轮子的转弯半径都是无穷大,为了保持智能转运车能够沿直线斜行,每个车轮需要施加驱动力且轮转速必须保证相等,这种转向方式可以实现在原地斜行行驶,适合于空间狭小、环境复杂场所的应用。
4、作为特殊的全轮转向模式,蟹行全轮转向可用于轨迹跟踪中须快速、大角度地改变航向的行驶需求,进而可以充分应对不同的道路状况,使智能转运车获得更高的机动性和灵活性。从智能转运车的运载能力出发,蟹行控制模式控制可实现车身的偏航姿态和运动轨迹解耦,确保车辆安全驶离当前位置并确保自身安全。同时蟹行转向时车辆可实现在无横摆运动下的点对点直接运动,在港口箱区等环境狭窄的空间路况下,能有效改善智能转运车的空间运动轨迹跟踪性能,提高安全性和通行能力。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的缺点,提供一种基于轨迹点的四轮转向车辆蟹行控制方法,用以提高智能转运车在港口箱区等狭窄场景下的通行能力。
2、为了达到以上目的,本发明具体技术方案如下:一种四轮转向车辆蟹行控制方法,由规划层、控制层及执行层构成,所述规划层基于智驾系统上游下发的蟹行模式标志位进行触发蟹行,给出蟹行轨迹点;控制层基于蟹行轨迹点进行轨迹跟踪,并实时根据误差进行反馈调整;执行层控制整车按照预期动作进行短距离换道;由此将车辆蟹行坐标系转换至自车坐标系,以适应车辆在港口进行蟹行换道的四种典型工况,所述工况包括蟹行脱困、短距离蟹行换道、蟹行绕行、跨车道蟹行换道。
3、进一步的,规划层在触发蟹行模式时,会基于全局坐标系给出轨迹点的坐标信息,各轨迹点在全局坐标系下的相对位置是固定的,拟合后的蟹行轨迹线是由两段直线和一段斜线组成,在全局坐标系下,轨迹点的坐标在一次蟹行阶段是保持不变的,但是随着车辆运动姿态的变化,车辆的质心位置是在实时变化的。
4、进一步的,所述控制层在接收到规划层的蟹行触发标志位和蟹行轨迹点后,首先基于车辆方向角与车辆实际坐标位置进行坐标系转换,将蟹行坐标系下的轨迹点转化到车辆坐标系下,对于坐标系转换,将蟹行坐标系进行平移和旋转后即可得到车辆坐标系,在车辆实时运动的过程中,蟹行轨迹点的坐标信息也在实时变化。
5、进一步的,车辆坐标系下的轨迹点的新坐标为:
6、x′=(x-α)cosφ+(y-b)sinφ
7、y′=(y-b)cosφ-(x-a)siniφ。
8、进一步的,由于转向执行器在蟹行模式下的存在转角限制,因此需要根据机械结构的极限在输出时将蟹行幅值转角限制在±x deg内,然后基于转向执行器的平均转角响应速率adeg/s,计算转角响应阶段的纵向位移和横向位移,作为蟹行状态开始和结束的判断阈值。通过实时对比自车位置与蟹行开始点的纵向距离来执行蟹行,实时对比自车位置与蟹行结束点的横向距离来结束蟹行;具体公式如下:
9、
10、
11、
12、与现有技术相比,本发明的有益效果为:。
13、1.本发明缩短了狭窄场景下的换道距离,有利于提高车辆的运营效率。
14、2.本发明的车辆基于轨迹点以实现车辆蟹行控制,可以提高蟹行场景下的跟踪精度:相较于基于轨迹线的蟹行控制方式,基于轨迹点的蟹行控制模式可以更好的做到自适应控制,无论是应对大范围蟹行换道还是小范围蟹行绕行,都可以减少标定工作量,使得整个算法可以更好的适配不同工况、不同车型;
15、3.本发明减少了蟹行控制超调:将转向执行器的响应性能考虑在内,可以基于转向执行器的响应速率实时计算蟹行触发和蟹行结束的阈值,做到提前转向,减少了控制超调的发生;
16、4.本发明提升了蟹行跟踪状态的稳定性:基于轨迹线的蟹行控制方式完全依靠人为标定,稳定性较差,可维护性不强;基于轨迹点的蟹行控制可以自适应求解,无需标定,面对多种工况的稳定性较强,算法维护优化效率也更高;
17、5.本发明的蟹行控制方法跟踪误差收敛快:基于轨迹线的蟹行控制算法只有单前馈控制,对误差不敏感,也无法对误差进行及时的补偿;而基于轨迹点的蟹行控制算法是由运动学作前馈,误差pid作反馈,可以及时对误差进行补偿,有利于误差收敛。
技术特征:
1.一种四轮转向车辆蟹行控制方法,其特征在于:由规划层、控制层及执行层构成,所述规划层基于智驾系统上游下发的蟹行模式标志位进行触发蟹行,给出蟹行轨迹点;控制层基于蟹行轨迹点进行轨迹跟踪,并实时根据误差进行反馈调整;执行层控制整车按照预期动作进行短距离换道;由此将车辆蟹行坐标系转换至自车坐标系,以适应车辆在港口进行蟹行换道的四种典型工况,所述工况包括蟹行脱困、短距离蟹行换道、蟹行绕行、跨车道蟹行换道。
2.根据权利要求1所述的四轮转向车辆蟹行控制方法,其特征在于:规划层在触发蟹行模式时,会基于全局坐标系给出轨迹点的坐标信息,各轨迹点在全局坐标系下的相对位置是固定的,拟合后的蟹行轨迹线是由两段直线和一段斜线组成,在全局坐标系下,轨迹点的坐标在一次蟹行阶段是保持不变的,但是随着车辆运动姿态的变化,车辆的质心位置是在实时变化的。
3.根据权利要求1所述的四轮转向车辆蟹行控制方法,其特征在于:所述控制层在接收到规划层的蟹行触发标志位和蟹行轨迹点后,首先基于车辆方向角与车辆实际坐标位置进行坐标系转换,将蟹行坐标系下的轨迹点转化到车辆坐标系下,对于坐标系转换,将蟹行坐标系进行平移和旋转后即可得到车辆坐标系,在车辆实时运动的过程中,蟹行轨迹点的坐标信息也在实时变化。
4.根据权利要求3所述的四轮转向车辆蟹行控制方法,其特征在于:车辆坐标系下的轨迹点的新坐标为:
5.根据权利要求1所述的四轮转向车辆蟹行控制方法,其特征在于:由于转向执行器在蟹行模式下的存在转角限制,因此需要根据机械结构的极限在输出时将蟹行幅值转角限制在±x deg内,然后基于转向执行器的平均转角响应速率a deg/s,计算转角响应阶段的纵向位移和横向位移,作为蟹行状态开始和结束的判断阈值。通过实时对比自车位置与蟹行开始点的纵向距离来执行蟹行,实时对比自车位置与蟹行结束点的横向距离来结束蟹行;具体公式如下:
技术总结
本发明公开了一种四轮转向车辆蟹行控制方法,由规划层、控制层及执行层构成,所述规划层基于智驾系统上游下发的蟹行模式标志位进行触发蟹行,给出蟹行轨迹点;控制层基于蟹行轨迹点进行轨迹跟踪,并实时根据误差进行反馈调整;执行层控制整车按照预期动作进行短距离换道;由此将车辆蟹行坐标系转换至自车坐标系,以适应车辆在港口进行蟹行换道的四种典型工况,所述工况包括蟹行脱困、短距离蟹行换道、蟹行绕行、跨车道蟹行换道。本发明缩短了狭窄场景下的换道距离,有利于提高车辆的运营效率,同时可以提高蟹行场景下的跟踪精度,减少了控制超调的发生,面对多种工况的稳定性较强,算法维护优化效率也更高,减少误差率。
技术研发人员:李涛,许正昊,曾超,张志达,刘灿,刘峰,叶玉博,陈子健,安凯
受保护的技术使用者:上海友道智途科技有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!