扭矩补偿方法、装置、车辆和存储介质与流程
本申请属于汽车,尤其涉及一种扭矩补偿方法、装置、车辆和存储介质。
背景技术:
1、目前,国内外纯电动汽车大多数采用驱动电机匹配单级减速器的架构,对于减速器机械传动的结构设计而言,由于考虑到润滑、热变形和磨损等因素对齿轮副动力传动的影响,啮合齿轮之间必须有一定的齿侧间隙。与传统的燃油车相比,电驱动传动系统的各个部件之间采用“硬连接”的形式,也即各个部件之间没有扭转减震器(torsional vibrationdamper,tvd)、飞轮、离合器、柔性联轴器或液力变矩器等传动减振器件连接。
2、当车辆在鹅卵石路段、搓板路段等特殊颠簸路段上行驶时,由于“硬连接”形式会产生较大冲击,导致整车闯动感较强,影响驾驶体验。
技术实现思路
1、本申请的目的在于提供一种扭矩补偿方法、装置、车辆和存储介质,旨在解决传统的纯电动汽车在颠簸路段行驶时存在的闯动感较强的问题。
2、本申请实施例的第一方面提供了一种扭矩补偿方法,所述方法包括:
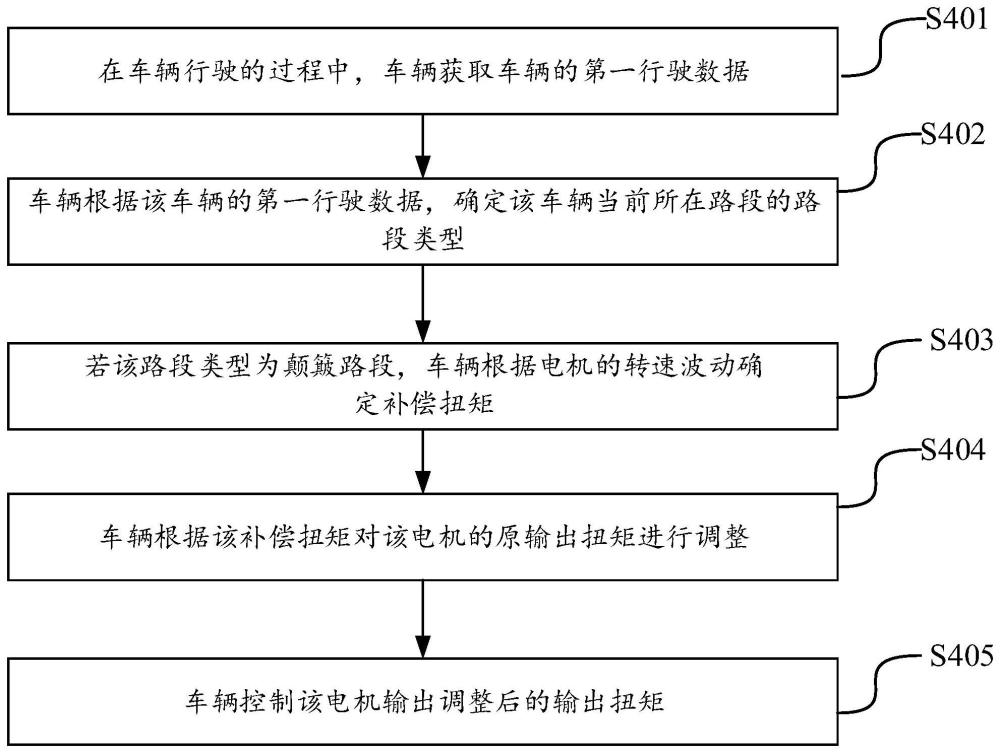
3、在车辆行驶的过程中,获取车辆的第一行驶数据;
4、根据所述车辆的第一行驶数据,确定所述车辆当前所在路段的路段类型;
5、若所述路段类型为颠簸路段,根据电机的转速波动确定补偿扭矩;
6、根据所述补偿扭矩对所述电机的原输出扭矩进行调整;
7、控制所述电机输出调整后的输出扭矩。
8、在一些实施例中,所述第一行驶数据包括所述车辆当前的车速和电机的转速;
9、所述根据所述车辆的第一行驶数据,确定所述车辆当前所在路段的路段类型,包括:
10、若所述车速在预设车速范围内,且所述电机的转速满足预设的转速波动条件,确定所述车辆当前所在路段的路段类型为颠簸路段。
11、在一些实施例中,确定所述电机的转速满足预设的转速波动条件,包括:
12、若产生目标转速波动的频率达到预设频率,确定所述电机的转速满足所述预设的转速波动条件,所述目标转速波动为转速波动值大于预设转速波动值的转速波动。
13、在一些实施例中,所述第一行驶数据还包括所述车辆的制动标志位;
14、所述若所述车速在预设车速范围内,且所述电机的转速满足预设的转速波动条件,确定所述车辆当前所在路段的路段类型为颠簸路段,包括:
15、若所述车速在预设车速范围内,且所述电机的转速满足预设的转速波动条件,且所述车辆的制动标志位表示所述车辆为非制动状态,确定所述车辆当前所在路段的路段类型为颠簸路段。
16、在一些实施例中,所述根据所述补偿扭矩对所述电机的原输出扭矩进行调整,包括:
17、将所述补偿扭矩和所述电机的原输出扭矩的和确定为调整后的输出扭矩。
18、在一些实施例中,所述根据电机的转速波动确定补偿扭矩,包括:
19、确定转速波动过程中最大转速和最小转速之间的转速差值;
20、确定所述转速差值所在的差值范围;
21、根据差值范围与补偿扭矩的对应关系,确定所述转速差值对应的补偿扭矩。
22、在一些实施例中,所述控制所述电机输出调整后的输出扭矩之后,所述方法还包括:
23、获取所述车辆的第二行驶数据;
24、根据所述车辆的第二行驶数据,确定所述车辆当前所在路段的路段类型;
25、若所述路段类型为非颠簸路段,控制所述电机输出所述原输出扭矩。
26、本申请实施例的第二方面提供了一种扭矩补偿装置,所述装置包括:
27、获取单元,用于在车辆行驶的过程中,获取车辆的第一行驶数据;
28、第一确定单元,用于根据所述车辆的第一行驶数据,确定所述车辆当前所在路段的路段类型;
29、第二确定单元,用于若所述路段类型为颠簸路段,根据电机的转速波动确定补偿扭矩;
30、调整单元,用于根据所述补偿扭矩对所述电机的原输出扭矩进行调整;
31、控制单元,用于控制所述电机输出调整后的输出扭矩。
32、在一些实施例中,所述第一行驶数据包括所述车辆当前的车速和电机的转速;
33、所述第一确定单元,用于若所述车速在预设车速范围内,且所述电机的转速满足预设的转速波动条件,确定所述车辆当前所在路段的路段类型为颠簸路段。
34、在一些实施例中,所述调整单元,用于将所述补偿扭矩和所述电机的原输出扭矩的和确定为调整后的输出扭矩。
35、在一些实施例中,所述第一行驶数据还包括所述车辆的制动标志位;
36、所述第一确定单元,用于若所述车速在预设车速范围内,且所述电机的转速满足预设的转速波动条件,且所述车辆的制动标志位表示所述车辆为非制动状态,确定所述车辆当前所在路段的路段类型为颠簸路段。
37、在一些实施例中,所述获取单元,用于获取所述车辆的驱动轮的轮速;根据所述驱动轮的轮速,确定所述车辆的车速。
38、在一些实施例中,所述第二确定单元,用于确定转速波动过程中最大转速和最小转速之间的转速差值;确定所述转速差值所在的差值范围;根据差值范围与补偿扭矩的对应关系,确定所述转速差值对应的补偿扭矩。
39、在一些实施例中,所述获取单元,还用于获取所述车辆的第二行驶数据;
40、所述第一确定单元,还用于根据所述车辆的第二行驶数据,确定所述车辆当前所在路段的路段类型;
41、所述控制单元,还用于若所述路段类型为非颠簸路段,控制所述电机输出所述原输出扭矩。
42、本申请实施例的第三方面提了一种车辆,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述扭矩补偿方法。
43、本申请实施例的第四方面提了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述扭矩补偿方法。
44、本发明实施例与现有技术相比存在的有益效果是:
45、在本申请实施例中,在车辆行驶的过程中,根据车辆的第一行驶数据对车辆的行驶路段进行分析,若确定车辆的行驶路段为颠簸路段,则根据电机的转速,对电机的输出扭矩进行补偿,通过对电机的输出扭矩进行补偿,使得齿轮副在扭矩作用下始终处于啮合贴齿状态,进而减缓整车闯动感,优化用户的驾驶体验。
技术特征:
1.一种扭矩补偿方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述第一行驶数据包括所述车辆当前的车速和电机的转速;
3.如权利要求2所述的方法,其特征在于,确定所述电机的转速满足预设的转速波动条件,包括:
4.如权利要求2所述的方法,其特征在于,所述第一行驶数据还包括所述车辆的制动标志位;
5.如权利要求1所述的方法,其特征在于,所述根据所述补偿扭矩对所述电机的原输出扭矩进行调整,包括:
6.如权利要求1所述的方法,其特征在于,所述根据电机的转速波动确定补偿扭矩,包括:
7.如权利要求1-6任一项所述的方法,其特征在于,所述控制所述电机输出调整后的输出扭矩之后,所述方法还包括:
8.一种扭矩补偿装置,其特征在于,所述装置包括:
9.一种车辆,其特征在于,所述车辆包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序使实现如权利要求1至7任一项所述的扭矩补偿方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的扭矩补偿方法。
技术总结
本申请提供了一种扭矩补偿方法、装置、车辆和存储介质,属于汽车技术领域,该方法包括:在车辆行驶的过程中,获取车辆的第一行驶数据;根据该车辆的第一行驶数据,确定该车辆当前所在路段的路段类型;若该路段类型为颠簸路段,根据电机的转速波动确定补偿扭矩;根据该补偿扭矩对该电机的原输出扭矩进行调整;控制该电机输出调整后的输出扭矩。通过对电机的输出扭矩进行补偿,使得齿轮副在扭矩作用下始终处于啮合贴齿状态,进而减缓整车闯动感,优化用户的驾驶体验。
技术研发人员:王龙龙,侯志辉,赵越,黄秉箫,徐蒋明,郝策
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!