控制装置、管理器、方法、非暂时性存储介质、车辆、车辆控制装置以及车辆控制方法与流程
本公开涉及一种控制装置、管理器、由安装在车辆上的管理器的计算机执行的方法、非暂时性存储介质、车辆、车辆控制装置以及车辆控制方法。
背景技术:
1、输出用于控制车辆的运动的控制命令的多个车辆驾驶员辅助装置可以安装在车辆上,以辅助驾驶员驾驶车辆。已经提出了一种车辆控制装置,其判优来自这样的多个驾驶员辅助装置的控制命令。例如,日本未审查专利申请公开第2017-30472号(jp 2017-30472a)公开了一种车辆控制装置,该车辆控制装置判优来自防撞辅助装置的转向命令和来自车道偏离避免辅助装置的转向命令,该防撞辅助装置是辅助用户驾驶以避免车辆与障碍物相撞的驾驶员辅助装置,该车道偏离避免辅助装置是辅助用户驾驶使得车辆在车道内行驶的驾驶员辅助装置。
技术实现思路
1、当驾驶员辅助装置以方向盘角度作为目标控制量来执行转向控制时,可以设想通过获取实际方向盘角度(即车辆的当前的实际方向盘角度)并将其用于控制来改善转向控制。然而,在获取实际方向盘角度时存在限制,因此在改善转向控制方面也存在限制。
2、本公开提供了一种可以改善驾驶员辅助装置的转向控制的控制装置、管理器、由安装在车辆上的管理器的计算机执行的方法、非暂时性存储介质以及车辆。
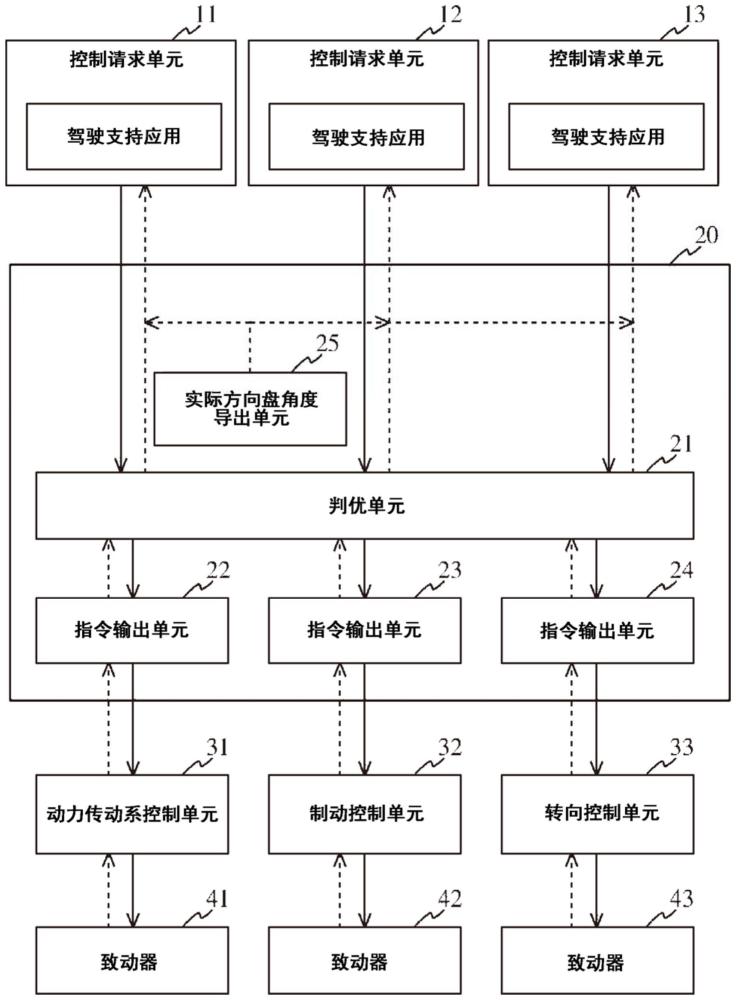
3、根据本公开的第一方面的控制装置包括一个以上处理器。所述一个以上处理器被配置为从驾驶员辅助应用接收多个第一请求。所述一个以上处理器被配置为对所述第一请求进行判优。所述一个以上处理器被配置为基于判优结果计算其物理量不同于所述第一请求的物理量的第二请求。所述一个以上处理器被配置为将所述第二请求分配给多个致动器系统中的至少一个。所述一个以上处理器被配置为向所述驾驶员辅助应用输出所述车辆的实际转向角。
4、根据本公开的第二方面的管理器包括一个以上处理器。所述一个以上处理器被配置为从多个adas应用接收多个行动计划。所述一个以上处理器被配置为对所述行动计划进行判优。所述一个以上处理器被配置为基于判优结果计算运动请求。所述一个以上处理器被配置为将所述运动请求分配给多个致动器系统中的至少一个。所述一个以上处理器被配置为向所述adas应用输出所述车辆的方向盘角度。在根据本公开的第二方面的管理器中,所述管理器可以安装在车辆中。
5、根据本公开的第三方面的管理器包括一个以上处理器。所述一个以上处理器被配置为从多个adas应用接收多个第一请求。所述一个以上处理器被配置为对所述第一请求进行判优。所述一个以上处理器被配置为基于判优结果计算其物理量不同于所述第一请求的物理量的第二请求。所述一个以上处理器被配置为将所述第二请求分配给多个致动器系统中的至少一个。所述一个以上处理器被配置为向所述adas应用输出所述车辆的实际方向盘角度。
6、根据本公开的第四方面的方法由安装在车辆上的管理器的计算机执行。所述方法包括:从多个adas应用接收多个行动计划;对所述行动计划进行判优;基于判优结果计算运动请求;将所述运动请求分配给多个致动器系统中的至少一个;以及向所述adas应用输出所述车辆的方向盘角度。
7、根据本公开的第五方面的非暂时性存储介质存储有指令,所述指令能由安装在车辆上的管理器的计算机执行,并且使所述管理器的所述计算机执行以下功能。所述功能包括:从多个adas应用接收多个行动计划;对所述行动计划进行判优;基于判优结果计算运动请求;将所述运动请求分配给多个致动器系统中的至少一个;以及向所述adas应用输出所述车辆的方向盘角度。
8、本发明还可以用作以下方面。根据本公开的第六方面的车辆控制装置包括一个以上处理器。所述一个以上处理器被配置为对从多个驾驶员辅助装置获取的多个控制命令进行判优,每个驾驶员辅助装置实现驾驶支持功能。所述一个以上处理器被配置为基于判优结果输出用于控制至少转向致动器的控制命令。所述一个以上处理器被配置为获取表示车辆的运动状态的信息。所述一个以上处理器被配置为基于获取的信息导出车辆的实际方向盘角度。所述一个以上处理器配置为向驾驶员辅助装置提供导出的实际方向盘角度。
9、根据本公开第六方面的车辆控制装置,可以导出结合车辆的运动状态且可适当地用于转向控制的实际方向盘角度,并将其提供给驾驶员辅助装置。因此,可以改善由驾驶员辅助装置执行的转向控制。
10、在根据本公开的第六方面的车辆控制装置中,所述一个以上处理器可以被配置为:当所述一个以上处理器从在多个驾驶员辅助装置中包括的驾驶员辅助装置获取请求由方向盘角度表示的转向的控制命令时,向已经输出请求由方向盘角度表示的转向的控制命令的驾驶员辅助装置提供导出的实际方向盘角度。在根据本公开的第六方面的车辆控制装置中,所述一个以上处理器可以被配置为:在基于请求由方向盘角度表示的转向的控制命令输出控制命令之后,基于表示车辆的运动状态的信息导出实际方向盘角度。在根据本公开的第六方面的车辆控制装置中,所述一个以上处理器可以被配置为:获取横向加速度和横摆率中的至少一个、车速和车身滑移角作为表示车辆的运动状态的信息。在根据本公开的第六方面的车辆控制装置中,车辆控制装置可以安装在车辆上。
11、根据本公开的第七方面的车辆控制方法由车辆控制装置的计算机执行。该车辆控制方法包括:对从多个驾驶员辅助装置获取的多个控制命令进行判优,每个驾驶员辅助装置实现驾驶支持功能;基于判优结果输出用于控制至少转向致动器的控制命令;获取表示车辆的运动状态的信息;基于获取的信息导出车辆的实际方向盘角度;以及向驾驶员辅助装置提供实际方向盘角度。
12、根据本公开的第八方面的非暂时性存储介质,其存储有能由一个以上处理器执行并使所述一个以上处理器执行以下功能的指令。功能包括:对从多个驾驶员辅助装置获取的多个控制命令进行判优,每个驾驶员辅助装置实现驾驶支持功能;基于判优结果输出用于控制至少转向致动器的控制命令;获取表示车辆的运动状态的信息;基于获取的信息导出车辆的实际方向盘角度;以及向驾驶员辅助装置提供实际方向盘角度。
技术特征:
1.一种包括在车辆中的控制装置,所述车辆中的控制装置包括:
2.根据权利要求1所述的控制装置,其中,所述第一请求各自包括对所述车辆的行驶方向上的请求和对所述车辆的横向方向上的请求。
3.一种包括在车辆中的管理器,所述管理器包括:
4.一种由包括在车辆中的管理器的计算机执行的方法,所述方法包括:
5.一种非暂时性存储介质,存储有由包括在车辆中的管理器的计算机执行的程序,所述程序执行时实现的方法包括:
6.一种配备有根据权利要求3所述的管理器的车辆。
7.根据权利要求1所述的控制装置,其中,所述多个致动器系统的所述操作状态包括在作为所述多个致动器系统中的一个的转向系统中实现的转向角。
技术总结
本公开提供一种控制装置、管理器、由安装在车辆上的管理器的计算机执行的方法、非暂时性存储介质、车辆、车辆控制装置以及车辆控制方法。安装在车辆上的控制装置包括一个以上处理器。所述一个以上处理器被配置为从驾驶员辅助系统接收多个第一请求。所述一个以上处理器被配置为对所述第一请求进行判优。所述一个以上处理器被配置为基于判优结果计算其物理量不同于所述第一请求的物理量的第二请求。所述一个以上处理器被配置为将所述第二请求分配给多个致动器系统中的至少一个。所述一个以上处理器被配置为向所述驾驶员辅助系统输出所述车辆的实际转向角。
技术研发人员:山田芳久
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!