用于线控转向的辅助驾驶员上下车的方法、装置和车辆与流程
本发明涉及汽车,具体涉及一种用于线控转向的辅助驾驶员上下车的方法、装置和车辆。
背景技术:
1、随着汽车行业高级自动驾驶的发展,线控技术在转向领域应用的重要性也日益明显。相较与传统电动助力转向系统,线控转向系统最主要的优点包括转向功能扩展的便利性(如变传动比、主动手感控制)以及安装空间的灵活性。图1所示为线控转向的模块示意图,力感反馈模块一般由操作元件/方向盘1、角度传感单元2和力感反馈驱动单元3组成;转向执行模块一般由转向执行驱动单元4、电机转角传感单元5以及机械转向器6。力感反馈模块与转向执行模块之间不存在机械连接,但存在通讯。
2、通过大量的实际案例表明,在上下车过程中,握持方向盘是一种常见的、给驾驶员提供额外支撑的方式。对于具有机械连接的转向系统而言,驾驶员进出车辆时对方向盘的握持会导致转向系统、悬架和轮胎发生弹性形变(类似上发条),从而使轮地摩擦力增大以对抗驾驶员的手力输入。
3、但对于机械解耦的线控转向系统而言,该行为无意中会使方向盘与转向轮之间出现角度差,从而导致驾驶员对车辆反应和转向轮位置存在不确定性。考虑到上述使用场景,为了便于驾驶员进出车辆,并防止角度错位。
4、目前存在的成熟方案是使用电子管柱锁:通过控制电子锁锁舌与转向轴锁套结构的配合实现方向盘锁止。但目前管柱电子锁受制于其内部机构及强度要求,体积普遍较大,加装后不利于力感反馈模块在驾驶舱内的空间布置。此外抱闸电机是另一种潜在方案:通过特殊的控制方式,通电时抱闸松开,在断电情况下抱闸抱紧刹住电机转子,由被锁止的电机与操作元件间的机械连接实现方向盘的锁止。但由于该方案需在现有结构上外加电机制动器机构,同样会导致力感反馈驱动单元包络体积增大。因此通过额外的控制系统(如上述电子锁、抱闸电机方案)均可能降低线控转向系统在空间布置上的灵活性。
技术实现思路
1、本发明要解决的技术问题是提供一种能不改变现有线控转向系统结构,实现辅助驾驶员上下车的技术方案。
2、为解决上述技术问题,本发明提供一种用于线控转向的辅助驾驶员上下车的方法,包括以下步骤:
3、步骤s1,根据预设条件输出开启辅助驾驶员上下车功能的激活条件信号;
4、步骤s2,获取当前方向盘角度,并计算当前方向盘角度与初始方向盘角度的角度差值;
5、步骤s3,当激活条件信号的输出满足开启辅助驾驶员上下车功能条件时,根据所述角度差值计算方向盘锁止扭矩,并输出至eps电机。
6、优选地,所述预设条件包括车速、档位和手刹信息。
7、优选地,当同时满足车速为零,挡位为p档,手刹为使能状态时,激活条件信号输出为1,表示满足开启辅助驾驶员上下车功能条件;当不满足满足车速为零,挡位为p档,手刹为使能状态中的任意一项时,激活条件信号输出为0,表示不满足开启辅助驾驶员上下车功能条件。
8、优选地,所述预设条件还包括车门开关状态或驾驶员落座情况。
9、优选地,所述方向盘锁止扭矩为弹簧扭矩和阻尼扭矩之和。
10、优选地,所述弹簧扭矩根据角度差值通过预设的弹簧扭矩特性曲线查表计算获取,弹簧扭矩输出方向与驾驶员手力方向相反。
11、优选地,所述阻尼扭矩根据角度差值通过预设的阻尼扭矩特性曲线查表计算获取,阻尼扭矩输出方向与驾驶员手力方向相反。
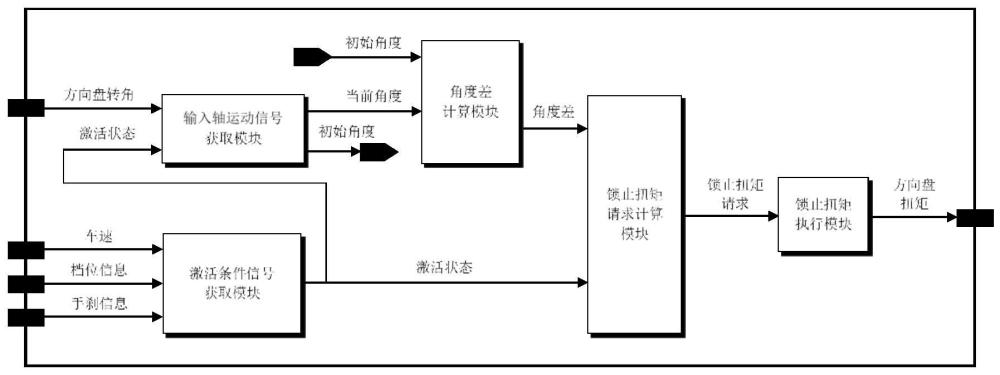
12、本发明还提供一种用于线控转向的辅助驾驶员上下车的装置,包括:
13、激活条件信号获取模块,用于根据预设条件输出开启辅助驾驶员上下车功能的激活条件信号;
14、输入轴运行信号获取模块,用于获取方向盘角度;
15、角度差计算模块,用于当激活条件信号的输出满足开启辅助驾驶员上下车功能条件时,计算当前方向盘角度与初始方向盘角度的角度差值;
16、锁止扭矩请求计算模块,用于根据所述角度差值计算方向盘锁止扭矩;
17、锁止扭矩执行模块,用于输出方向盘锁止扭矩至eps电机;
18、所述用于线控转向的辅助驾驶员上下车的装置应用前述的用于线控转向的辅助驾驶员上下车的方法。
19、本发明还提供一种车辆,包括前述的用于线控转向的辅助驾驶员上下车的装置。
20、与现有技术相比,本发明不改变现有线控转向系统结构,仅通过软件实现辅助驾驶员的上下车。
技术特征:
1.一种用于线控转向的辅助驾驶员上下车的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于线控转向的辅助驾驶员上下车的方法,其特征在于,所述预设条件包括车速、档位和手刹信息。
3.根据权利要求2所述的用于线控转向的辅助驾驶员上下车的方法,其特征在于,当同时满足车速为零,挡位为p档,手刹为使能状态时,激活条件信号输出为1,表示满足开启辅助驾驶员上下车功能条件;当不满足满足车速为零,挡位为p档,手刹为使能状态中的任意一项时,激活条件信号输出为0,表示不满足开启辅助驾驶员上下车功能条件。
4.根据权利要求2所述的用于线控转向的辅助驾驶员上下车的方法,其特征在于,所述预设条件还包括车门开关状态或驾驶员落座情况。
5.根据权利要求1所述的用于线控转向的辅助驾驶员上下车的方法,其特征在于,所述方向盘锁止扭矩为弹簧扭矩和阻尼扭矩之和。
6.根据权利要求5所述的用于线控转向的辅助驾驶员上下车的方法,其特征在于,所述弹簧扭矩根据角度差值通过预设的弹簧扭矩特性曲线查表计算获取,弹簧扭矩输出方向与驾驶员手力方向相反。
7.根据权利要求5所述的用于线控转向的辅助驾驶员上下车的方法,其特征在于,所述阻尼扭矩根据角度差值通过预设的阻尼扭矩特性曲线查表计算获取,阻尼扭矩输出方向与驾驶员手力方向相反。
8.一种用于线控转向的辅助驾驶员上下车的装置,其特征在于,包括:
9.一种车辆,其特征在于,包括如权利要求8所述的用于线控转向的辅助驾驶员上下车的装置。
技术总结
本发明公开了一种用于线控转向的辅助驾驶员上下车的方法,包括以下步骤:步骤S1,根据预设条件输出开启辅助驾驶员上下车功能的激活条件信号;步骤S2,获取当前方向盘角度,并计算当前方向盘角度与初始方向盘角度的角度差值;步骤S3,当激活条件信号的输出满足开启辅助驾驶员上下车功能条件时,根据所述角度差值计算方向盘锁止扭矩,并输出至EPS电机。与现有技术相比,本发明不改变现有线控转向系统结构,仅通过软件实现辅助驾驶员的上下车。
技术研发人员:郑敏华,马洪顺,刘采源,姜卓
受保护的技术使用者:博世华域转向系统有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!